Nach schier endlosem Experimentieren mit dem Schaltregler LM2577-ADJ, wurde nun doch der Einfachheit halber auf den LM2576-T12 zurück gegriffen:
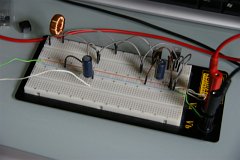
Erste Tests verliefen erfolgreich:

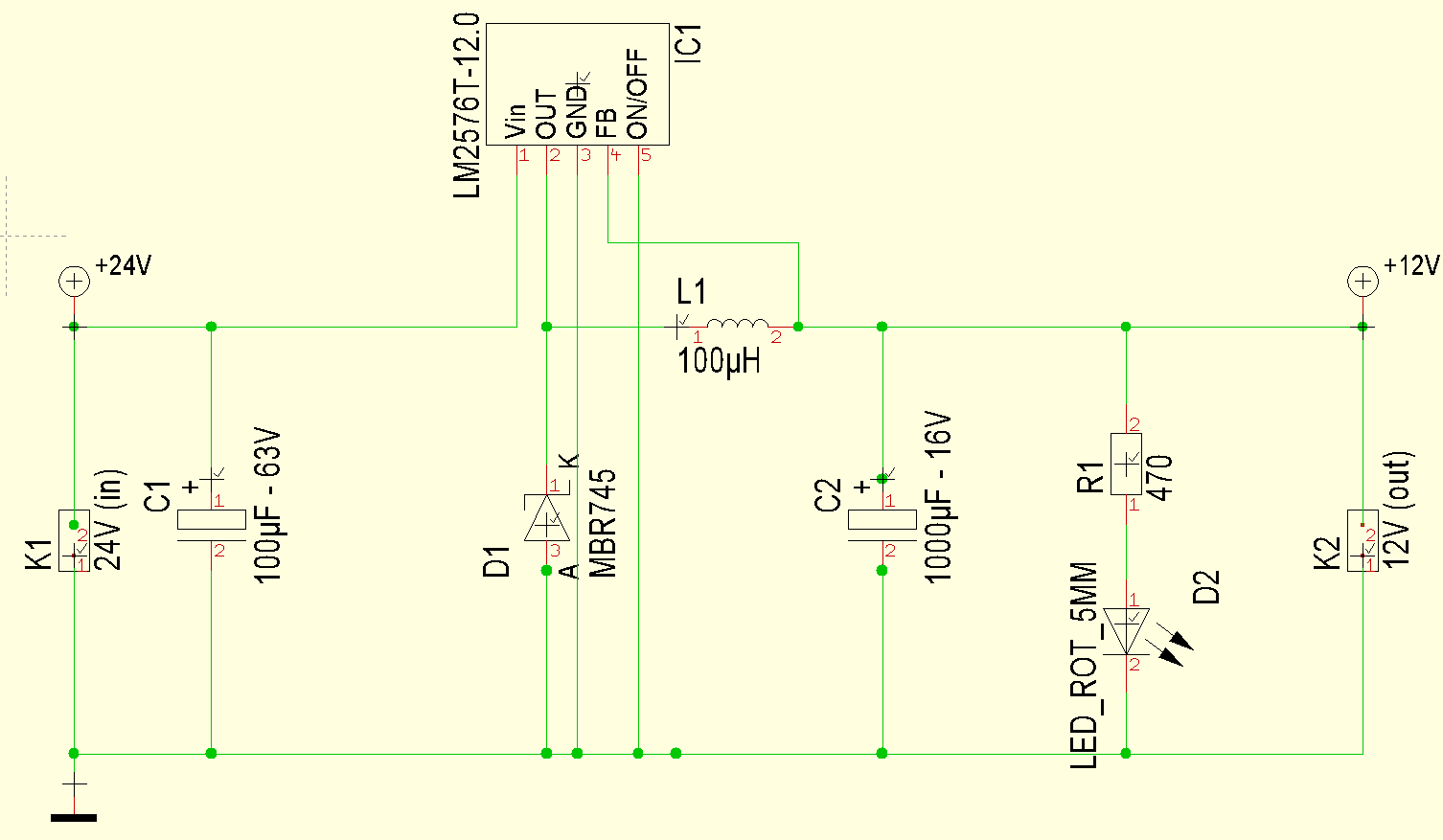
Uns es reichen tatsächlich ganze fünf Bauteile aus:
Ausserdem geht ja bekanntermaßen nichts über einen aufgeräumten, übersichtlichen Testaufbau… ;-)
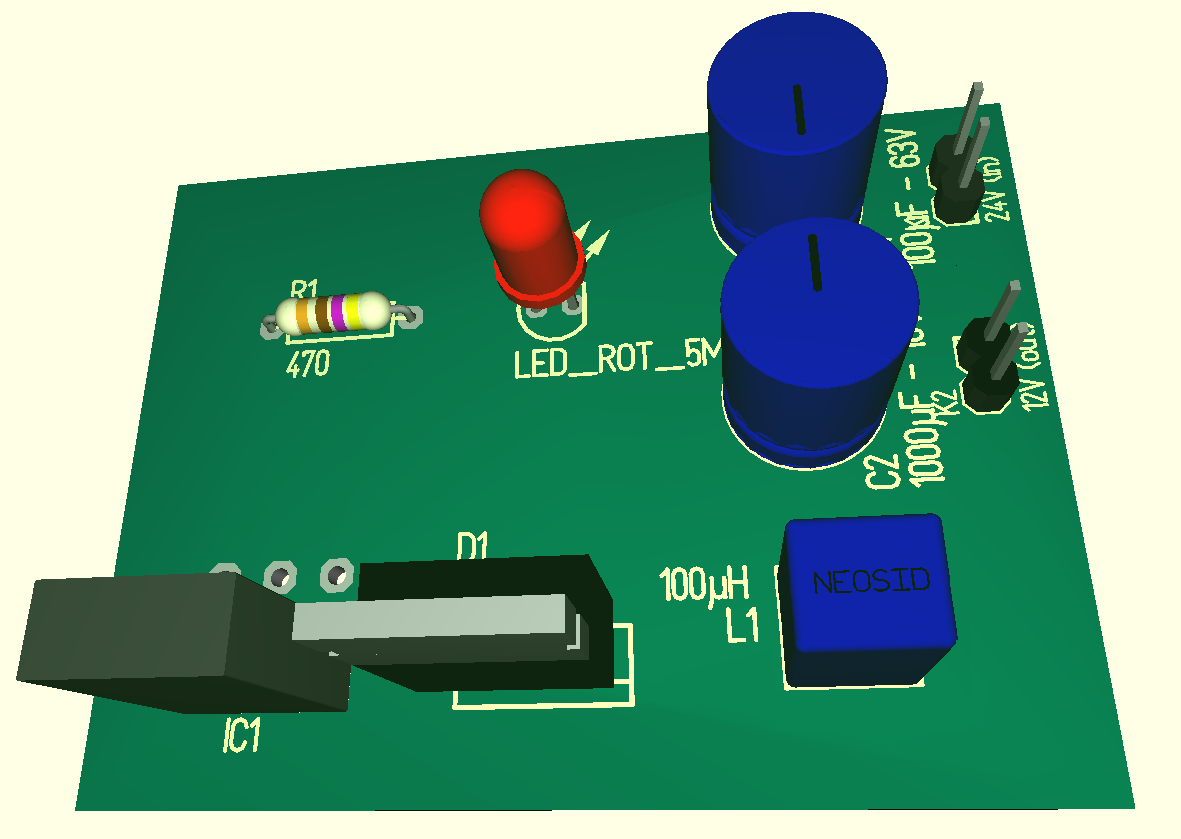
Fertig aufgebaut (gelötet) sieht das Ganze dann so aus:

Die dicke Drosselspule wurde in diesem endgültigen Aufbau noch gegen eine elegantere, kompakte Version ausgetauscht.
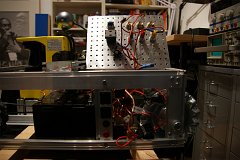
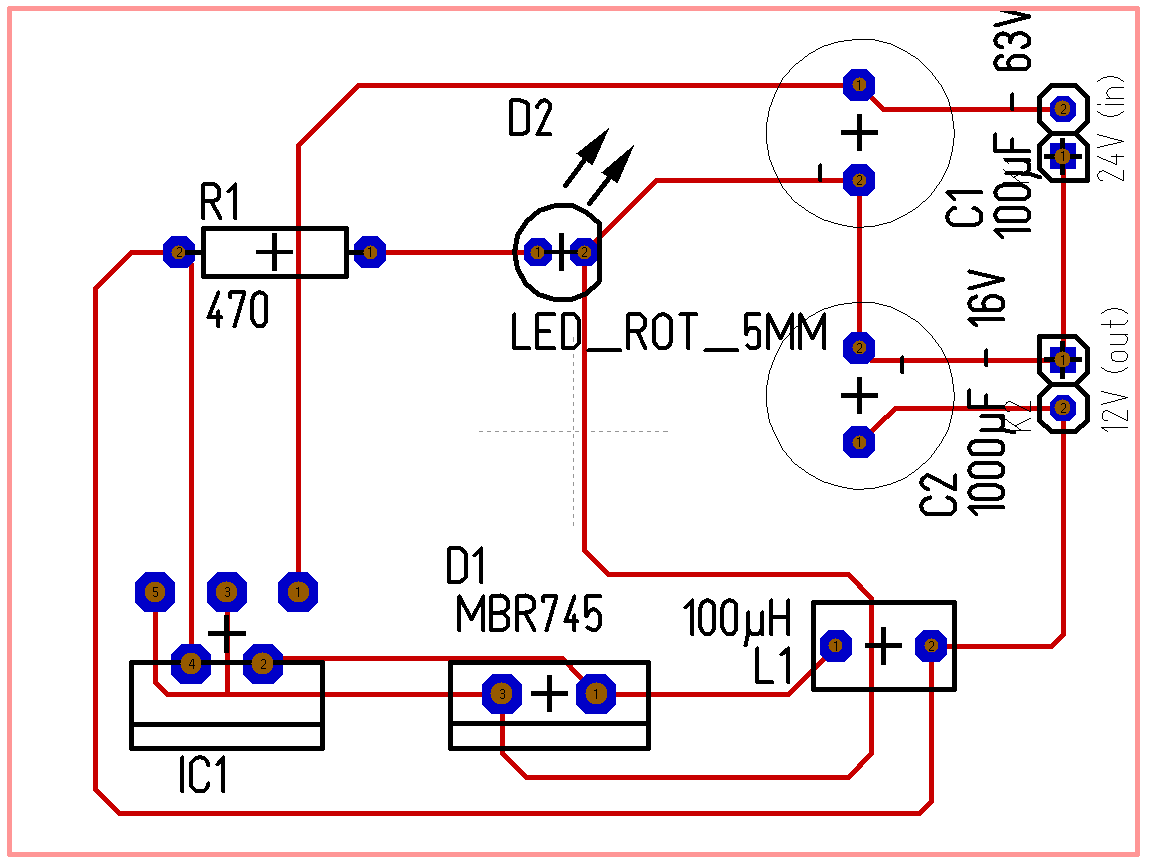
Die seltsame, scheinbar verschwenderische Aufteilung auf der Platine rührt daher, dass am montierten Ort noch ausreichend Platz nötig ist, um den PC einzuschalten und ggf. mal eine SD-Speicherkarte einzusetzen:





Den Schaltplan dazu gibt es übrigens (als ersten) in der neuen Schaltplan und Layout-Sektion links im Hauptmenü; auch als Download im Target 3001! Format.