mrs1
mrs steht hierbei nicht für:
* den Flughafen Marseille gemäß IATA-Code
* die englische Bezeichnung für Frau, insbesondere für eine verheiratete Frau (Mrs. bzw. Mrs)
* den Ausdruck Marginal Rate of Substitution, d. h. die Grenzrate der Substitution
* Magnetresonanzspektroskopie, ein bildgebendes Verfahren in der Medizin
* die nicaraguanische Partei Movimiento de Renovación Sandinista
* Minimal Recursion Semantics, ein Gerüst zur formalen Repräsentation der Semantik in computerlinguistischen Grammatiken für natürliche Sprachen
* Mouvement pour le Rattachement de la Sarre à la France, Bewegung zur Rückgliederung des Saargebiets an Frankreich nach dem Zweiten Weltkrieg
* Musikrollenspiel, ein browserbasiertes Rollenspiel, das in der Musikszene spielt
* Marginal rate of substitution (economics)
* Materials Receipt Sheet
* MRS degree
* Materials Research Society
* The Market Research Society
* Minimal Recursion Semantics (linguistics)
* MRS suit (a type of breathing apparatus)
* MRS Logística S.A.
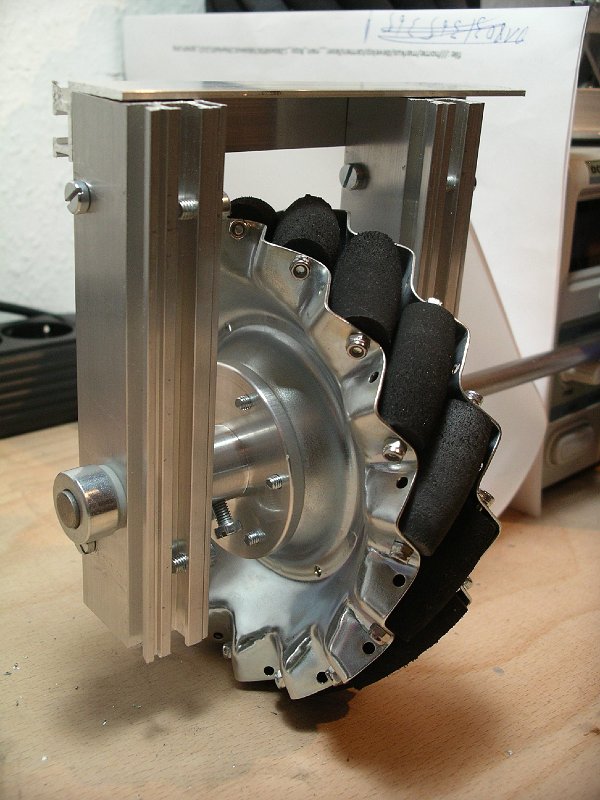
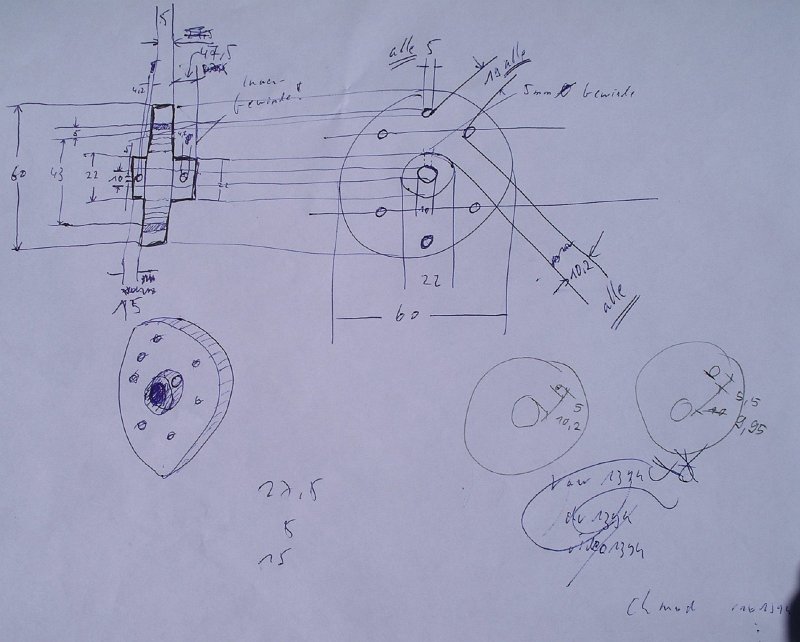
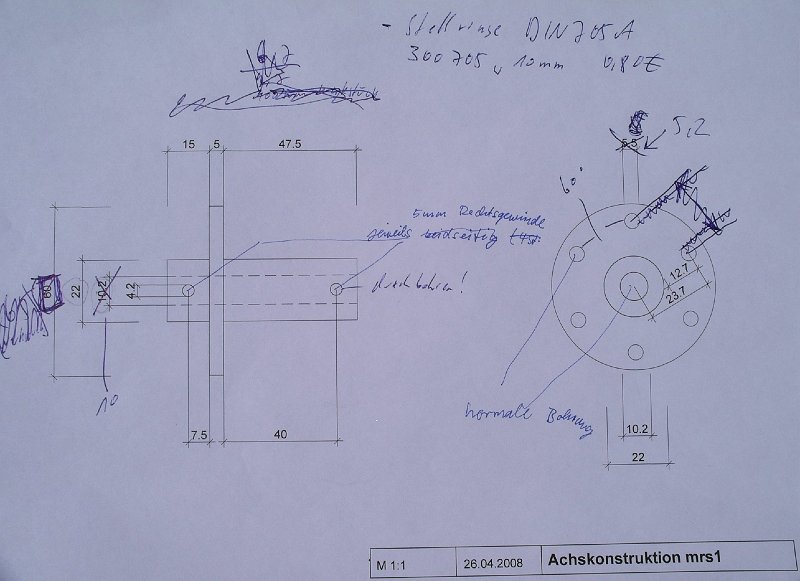
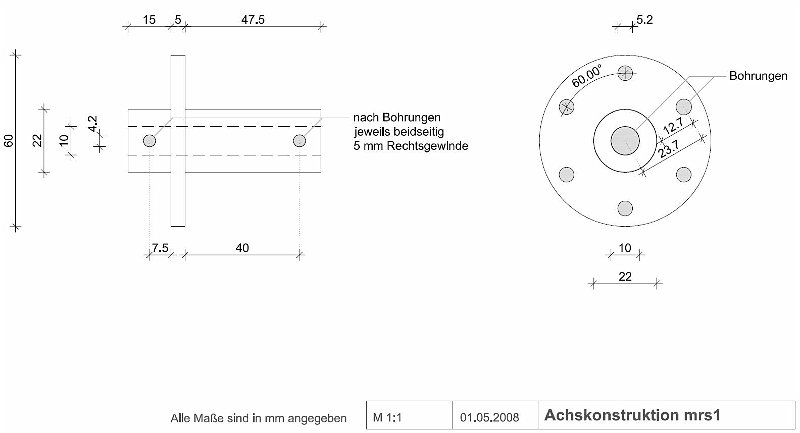
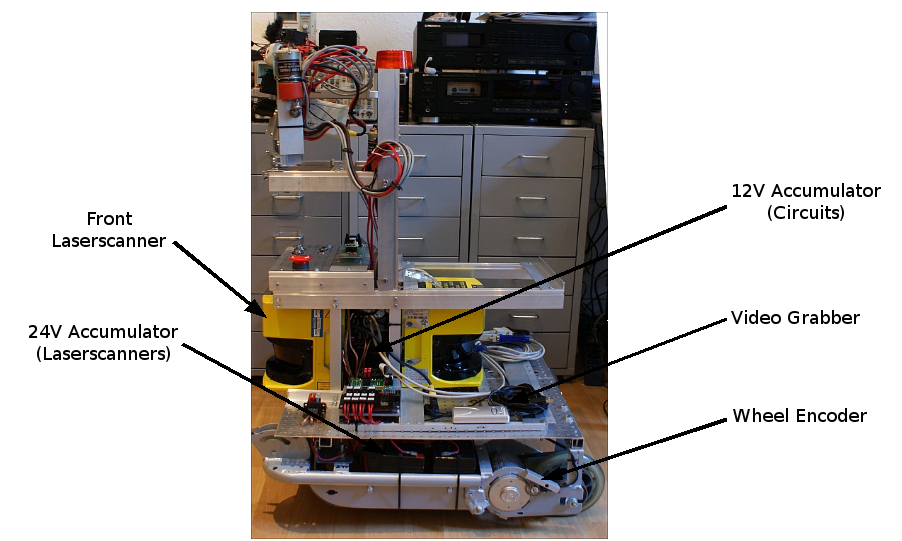
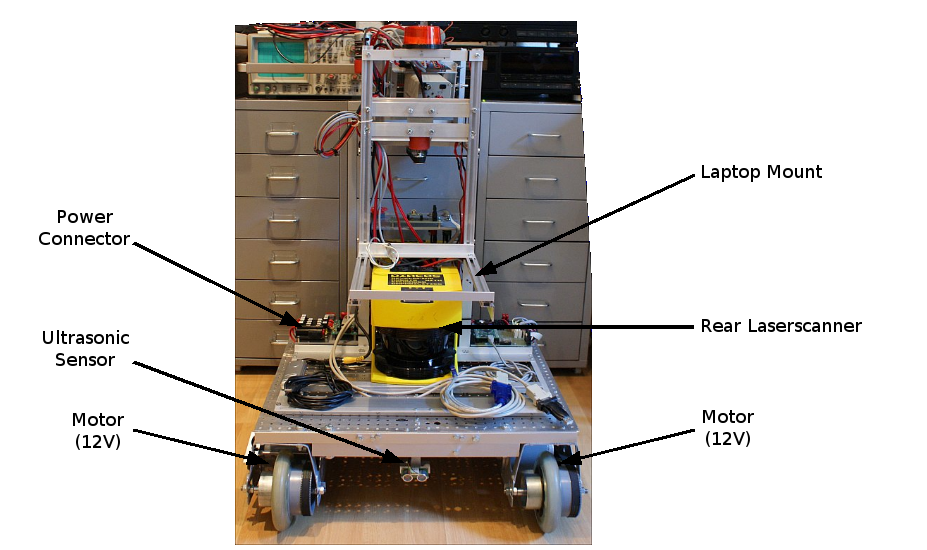
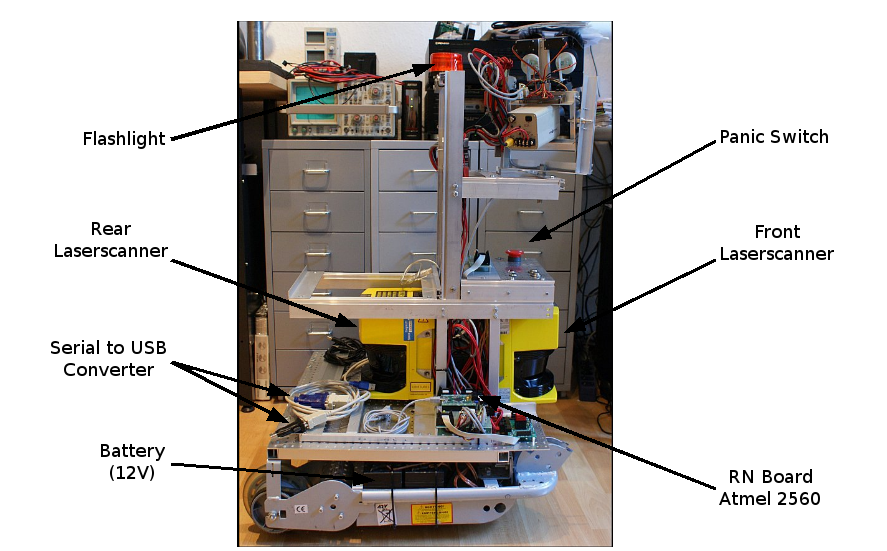
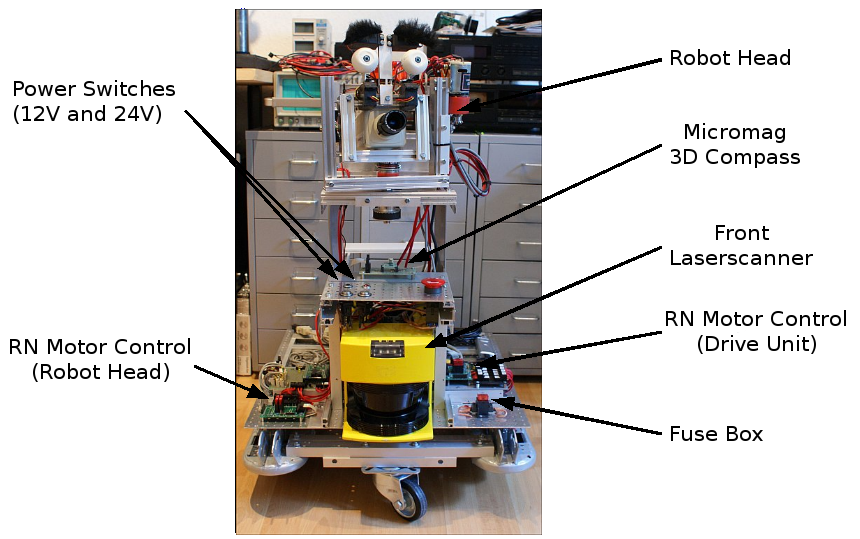
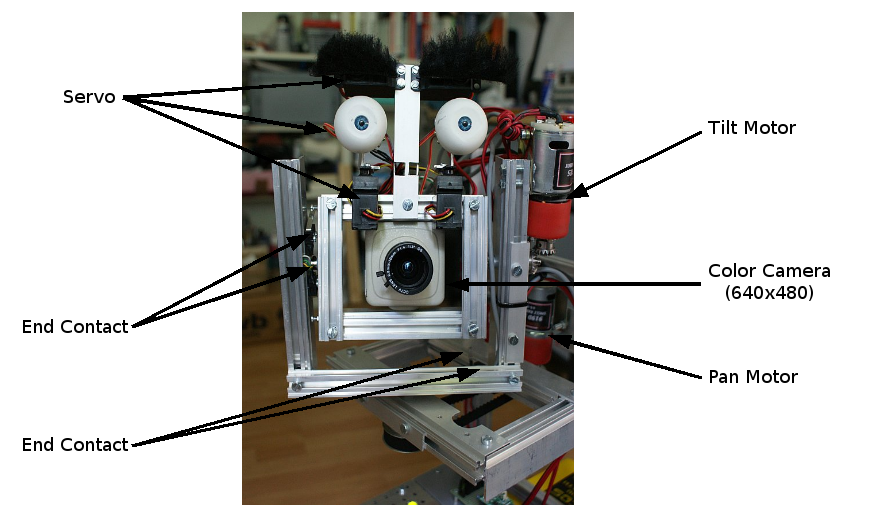
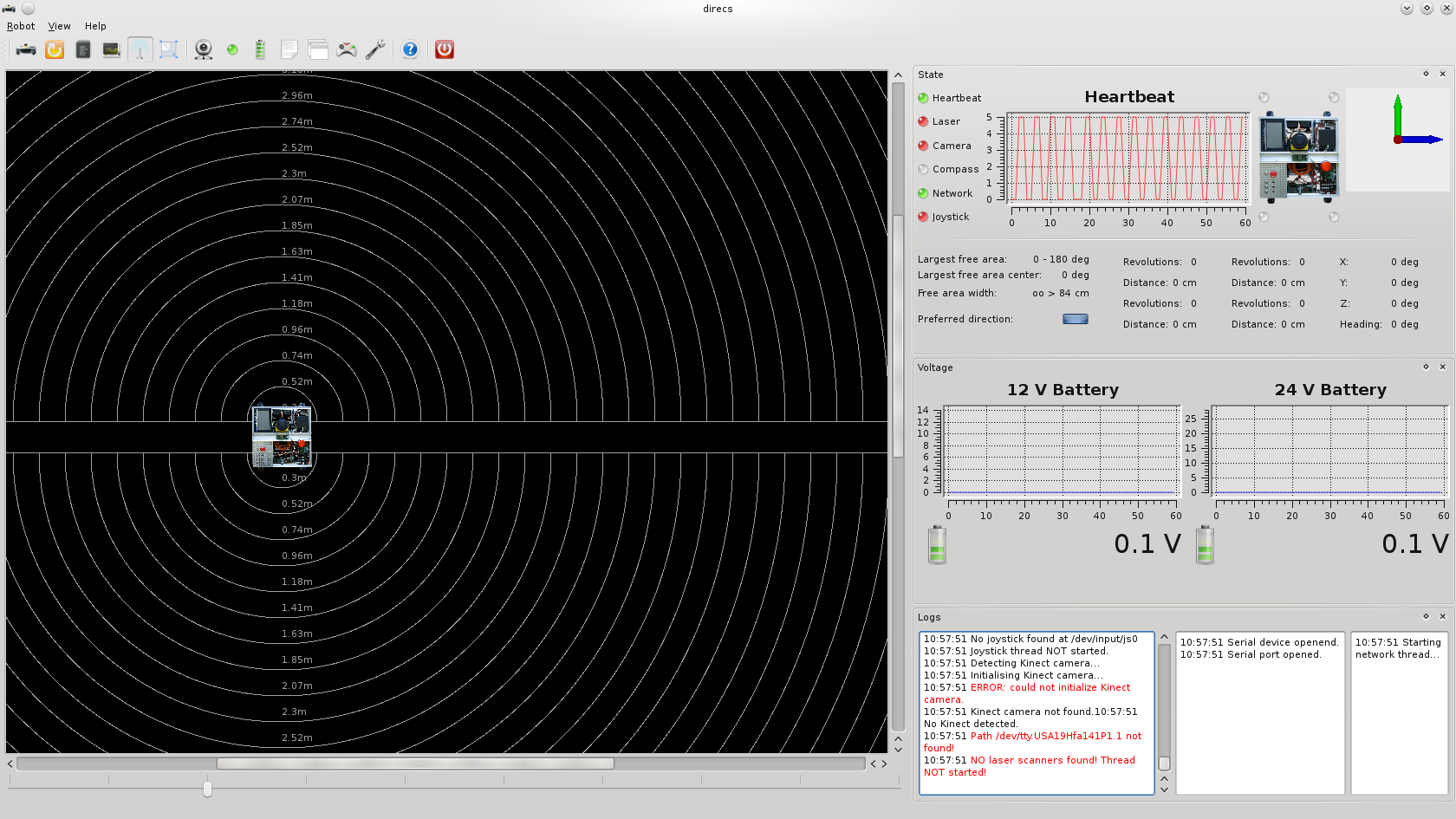
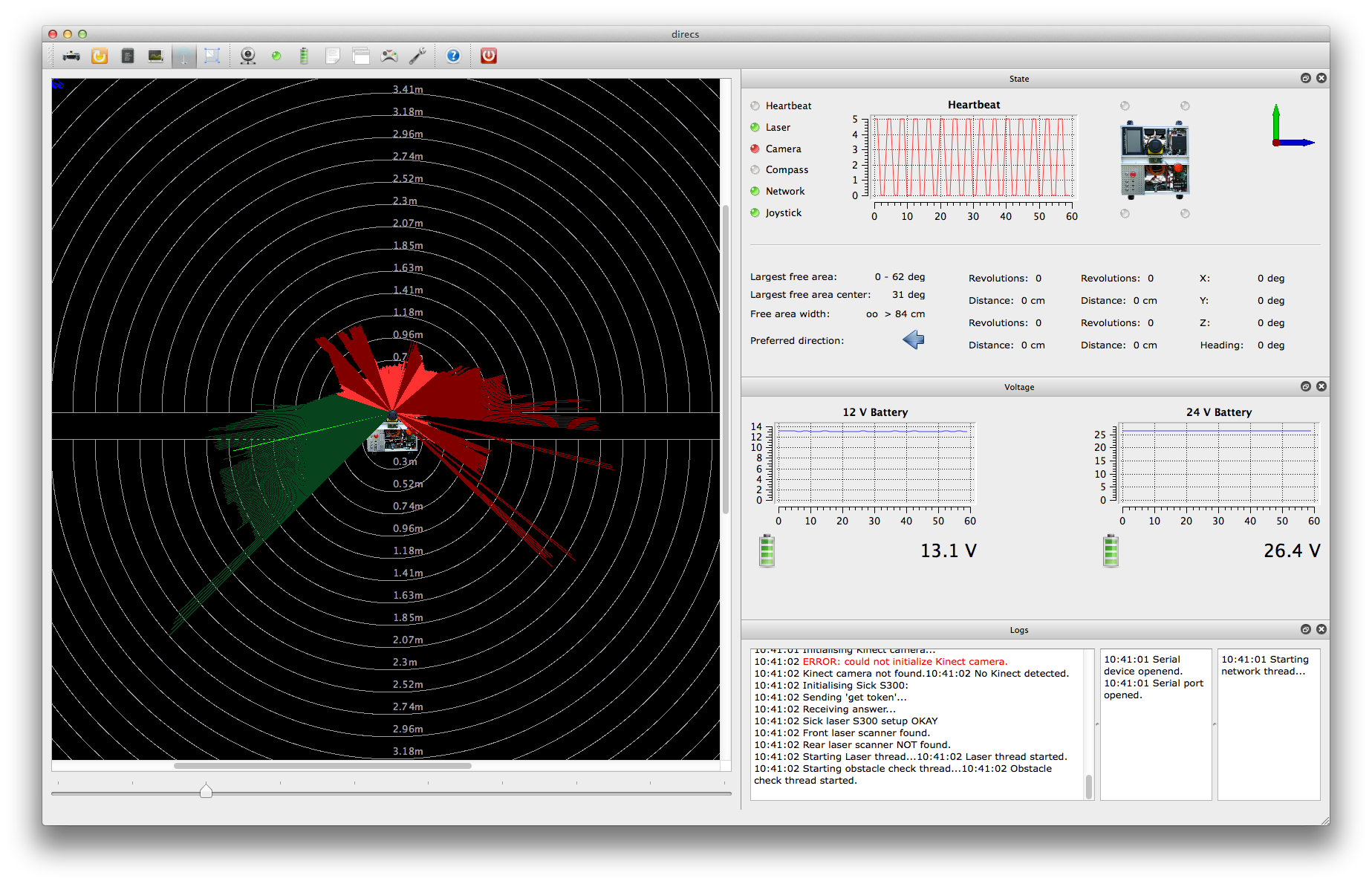
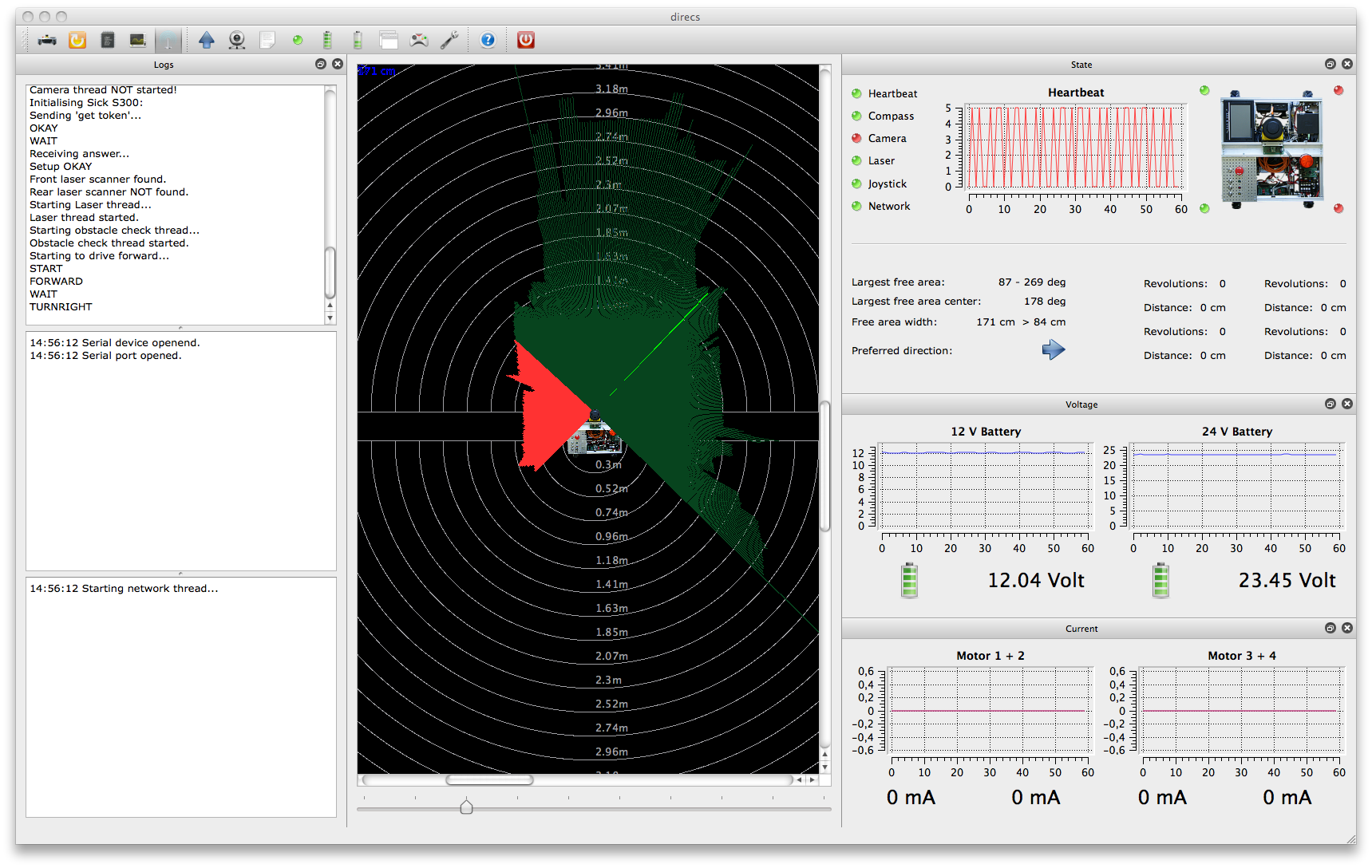
mrs1 heißt ganz einfach: „mobile robot system 1„.

Der zweite, aktuelle Roboter heißt direcs1.
Das steht für „digital intelligent robot embedded control system 1„.
- Hat der Roboter einen Namen?
- Ja. Und da es für viele Laien oder Nicht-Robotik-Interessierte ohnehin ein scheinbar langweiliges Hobby ist, hat er auch einen ebenso scheinbar langweiligen Namen bekommen. ;-)
- Was soll der Roboter mal können / tun?
- Eine Frage, die insbesondere von Laien – oder netter formuliert – von nicht-Robotik-Interessierten gestellt wird, ist, was der Roboter denn mal so können oder machen solle.
Die Antwort ist recht einfach: Nichts.
Es geht mir nicht darum, einen Roboter zu entwickeln, zu konstruieren und zu bauen, der etwas bestimmtes kann. Es geht mir vielmehr darum, ihn eben zu entwickeln, zu konstruieren, zu bauen. Und dabei viel zu lernen und „über den Tellerrand“ zu blicken, was es eben noch so für Themen, Methoden und Verfahren in der Welt so gibt.
Oder anders: Der Weg ist das Ziel.
Es macht einfach Spaß, immer wieder an kleinen oder großen Lösungen zu tüfteln und sich daran zu freuen. Ein Zeitvertreib, ein Hobby eben.
Views: 0