|
direcs
2012-09-30
|
|
direcs
2012-09-30
|
#include "sensorThread.h"#include "laserThread.h"#include <QTimer>#include <QDateTime>#include <QThread>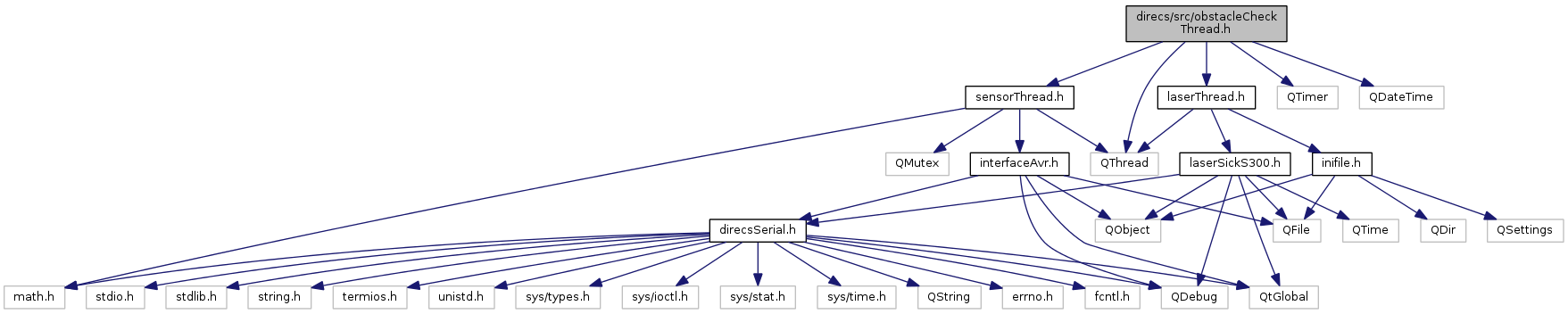
Go to the source code of this file.
Classes | |
| class | ObstacleCheckThread |
| Checks if there is an obstacle in front the robot. More... | |
 1.8.1.1
1.8.1.1 
