Der Bau geht weiter: Der Roboter hat zwei weitere IR-Sensoren auf der Rückseite bekommen.



Die Abfrage wurde im Programm auch gleich mit umgesetzt. Das Programm reagiert nun auf einstellbare Distanzen:
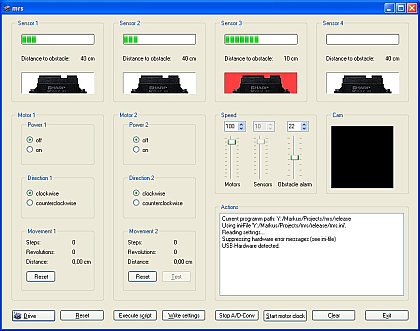
Die Programmlogik (Ausweichen bei Hindernissen ist in Arbeit und stellt nun die eigentliche Herausforderung dar…