Ein nicht einfaches Thema in der Robotik ist die Selbstlokalisierung. Soll heißen: Der Roboter muss selbst wissen, wo er ist. Einen Anfang dazu bilden Sensoren, die z.B. an den Rändern montiert werden, damit festgestellt werden kann, wieweit der Bot in welche Richtung gefahren ist. Möglich machen das Rad-Encoder. Diese bestehen i.d.R. aus einer Lichtschranke und einer sogenannten Schlitzscheibe. Dreht sich nun das Rad und unterbricht mit den Markierungen auf der Scheibe die Lichtschranke. Diese Unterbrechungen lassen sich an der Lichtschranke abfragen und zählen. Weiß man dann, wieviele Impulse einer Radumdrehung entsprechen, muss man nur noch den Umfang des Rades messen und hat so die zurückgelegte Entfernung. Eine Geschwindigkeitmessung ist damit dann natürlich auch leicht möglich (m/s).
In diesem Bild sieht man die von mir verwendeten Rad-Enconder :
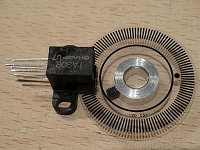

Praktischerweise passten diese nach leichtem Aufbohren direkt auf meine Motoren:


DAnn war echte Präzisionsarbeit oder „Fummelkram“ angesagt. Es galt, die Gabellichtschranken zu montieren. Als erstes wurde mit sanfter Gewalt die Schutzkappe vom Getriebe der Motoren entfernt:

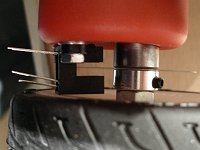
Danach wurde die Lichtschranke an der roten Schutzkappe montiert:




( Wohlgemerkt: Die Schrauben, die hier die Lichtschranke halten, sind nur 3 mm im Durchmesser!)
Glock gehabt: Es passte wirklich „auf den Millimeter“:


Das diese Arbeit an beiden Rändern erforderlich war, dürfte wohl klar sein… Aber, wer hätte es gedacht, alle Kabel blieben heil, der teure Encoder und die Lichtschranken haben alles überlebt, wie die erste Testmessung zeigte:
