|
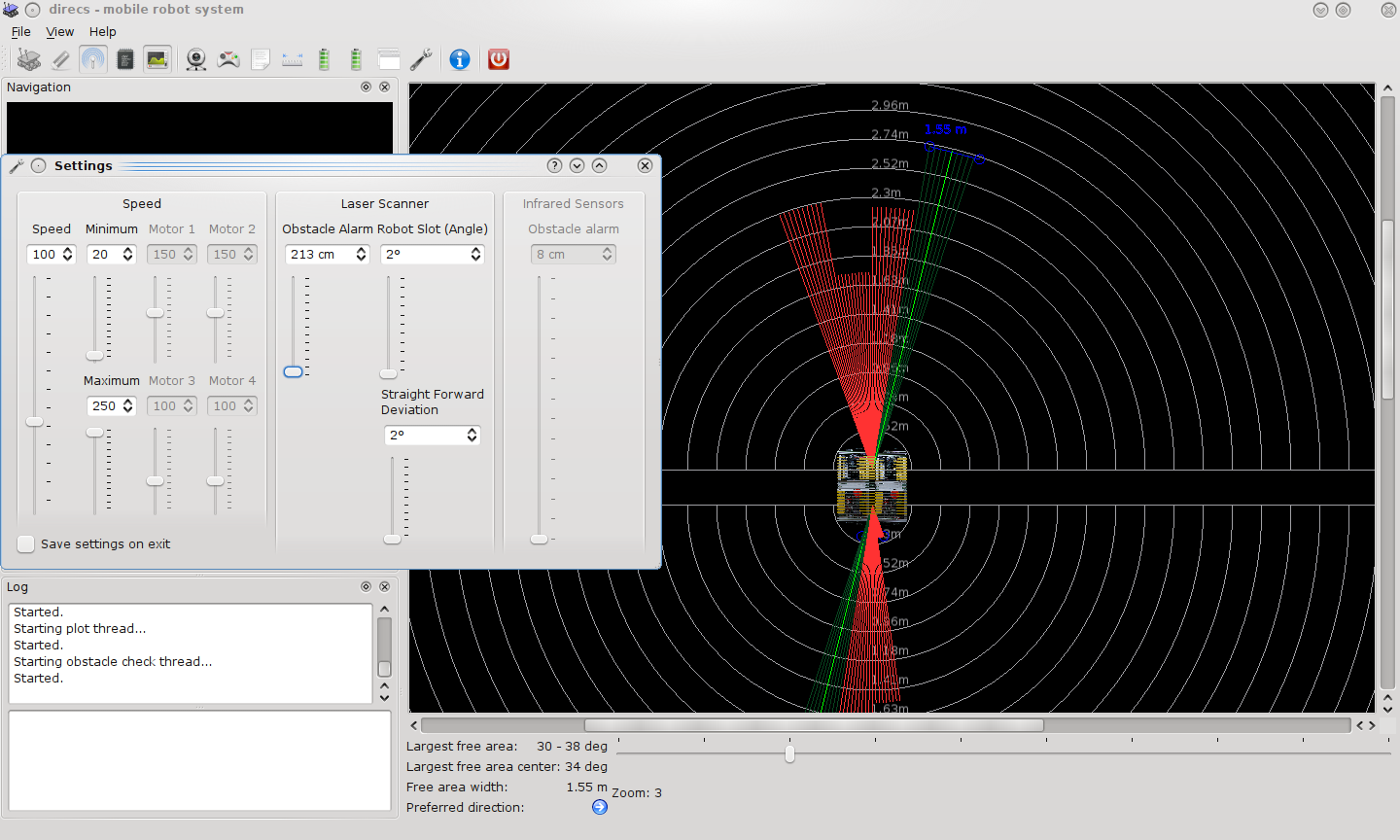
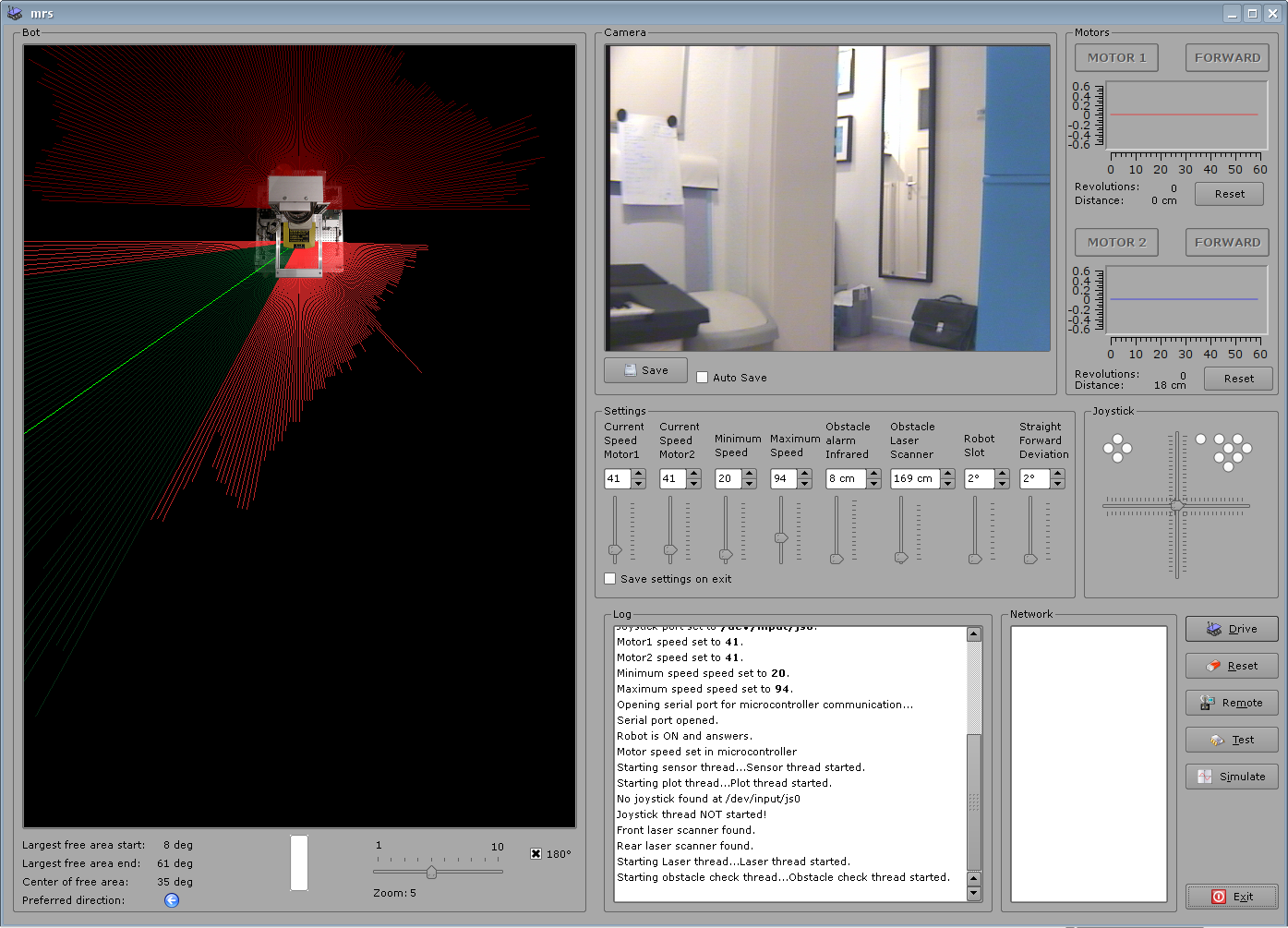
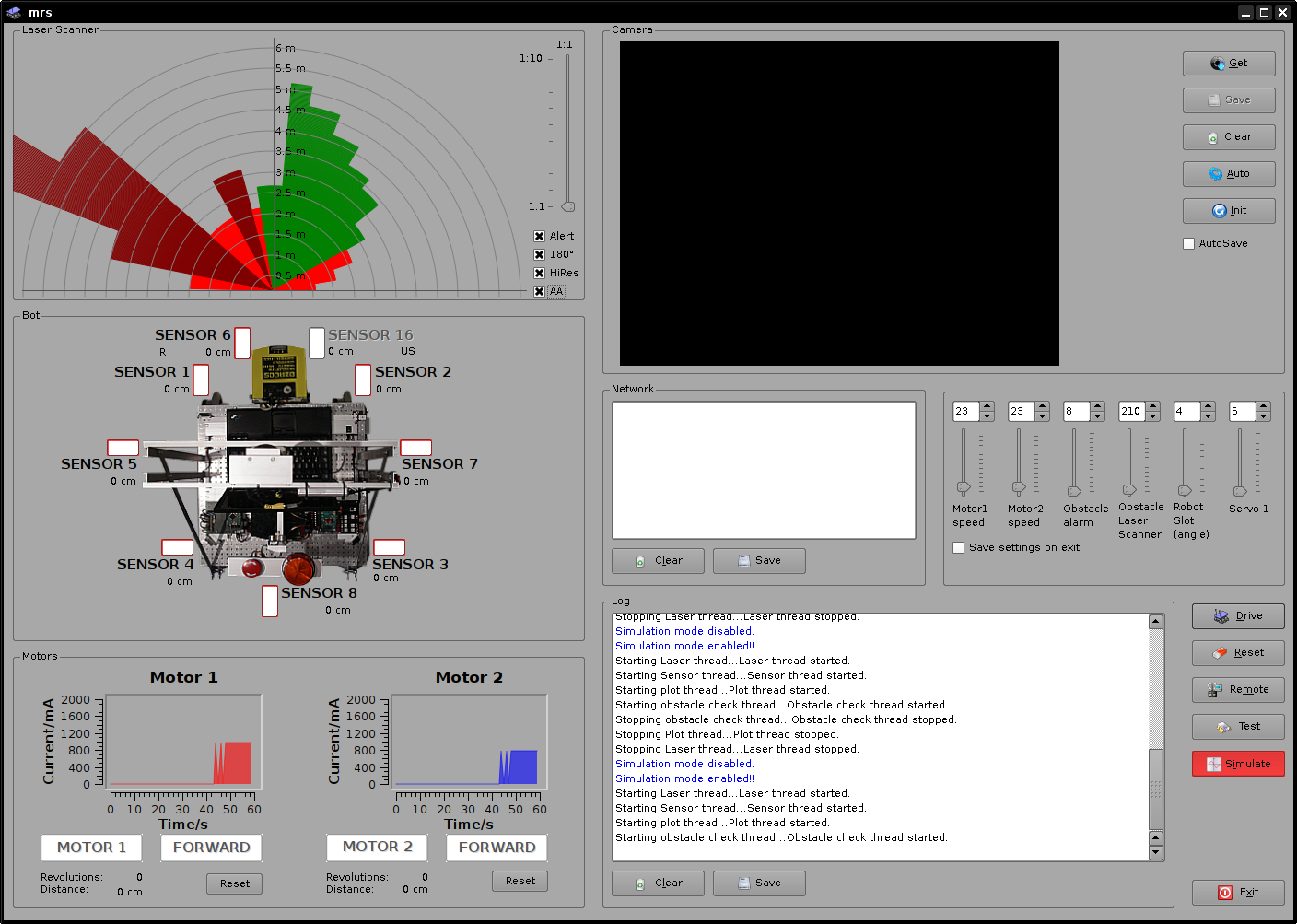
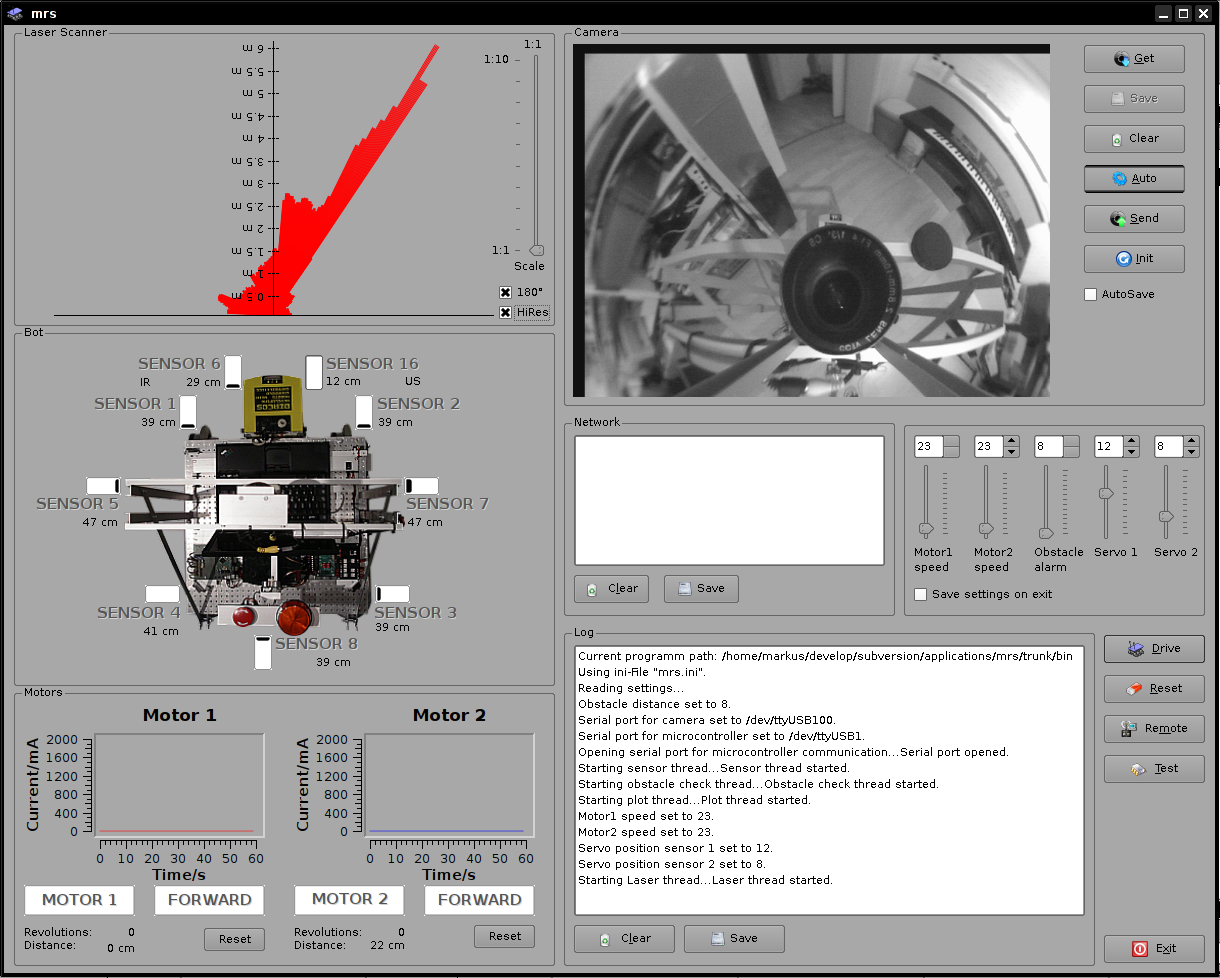
Entwicklung einer Anzeige der „Durchfahrweite“ (blaue Linie) – Scenario 2 |
|
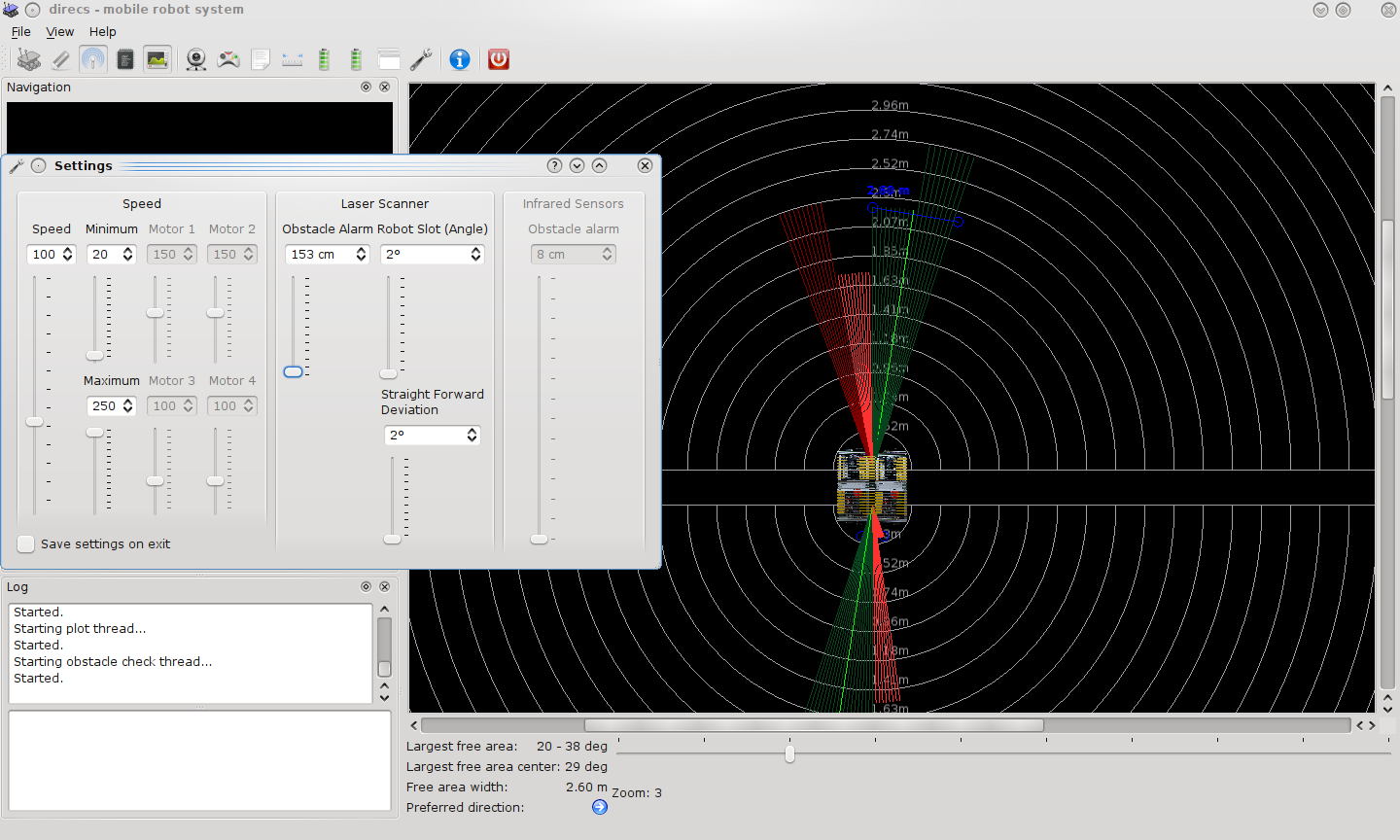
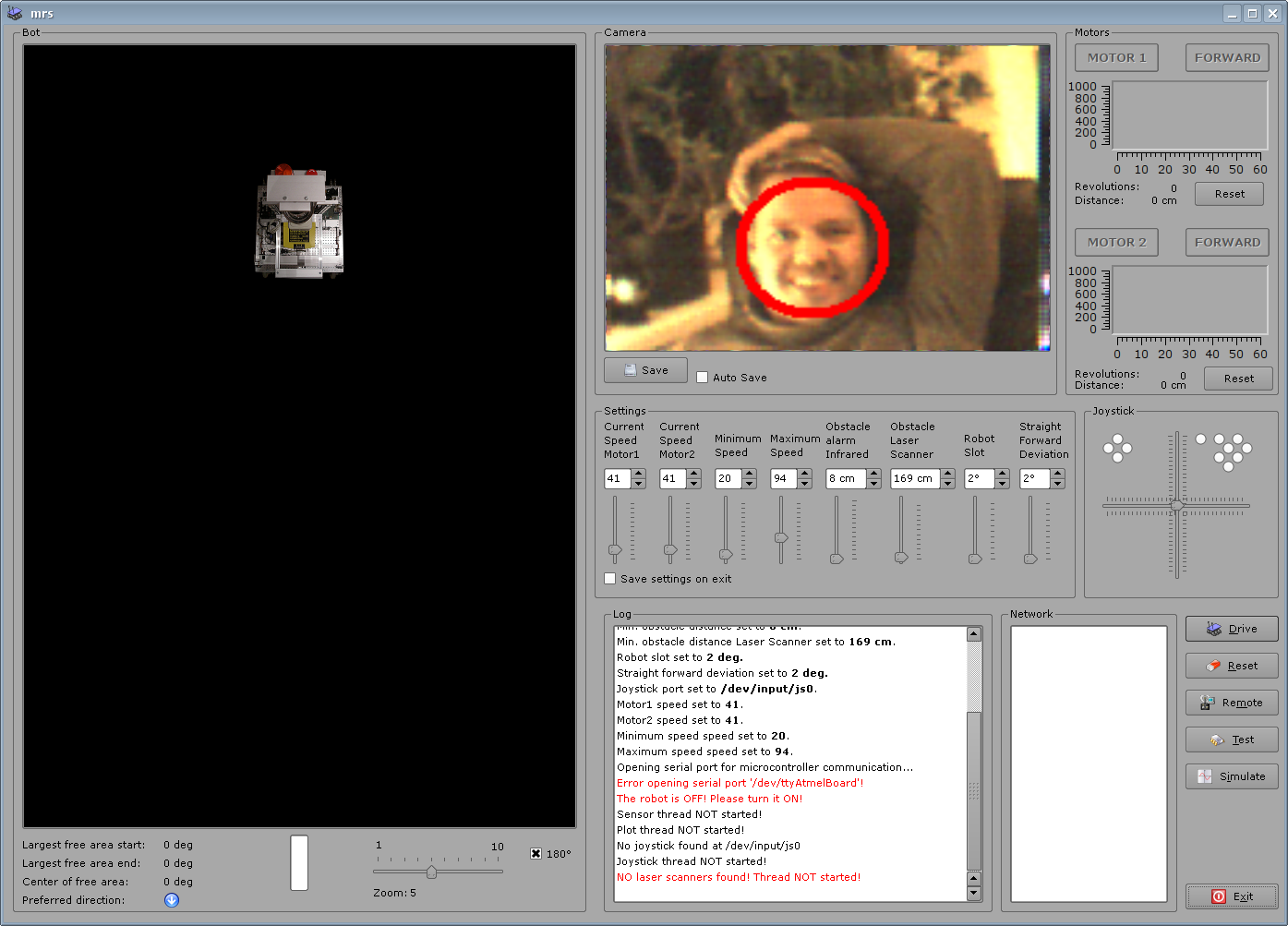
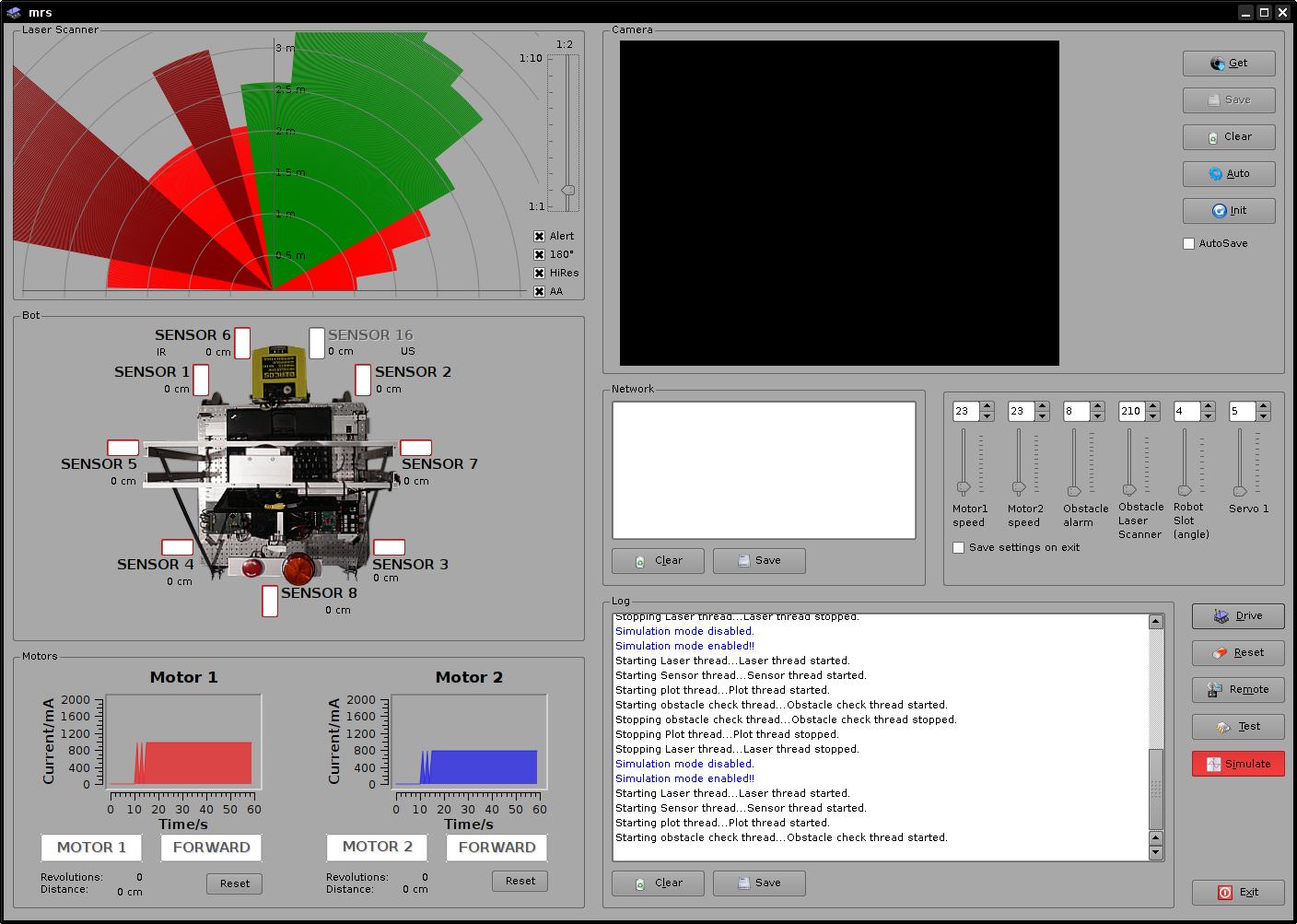
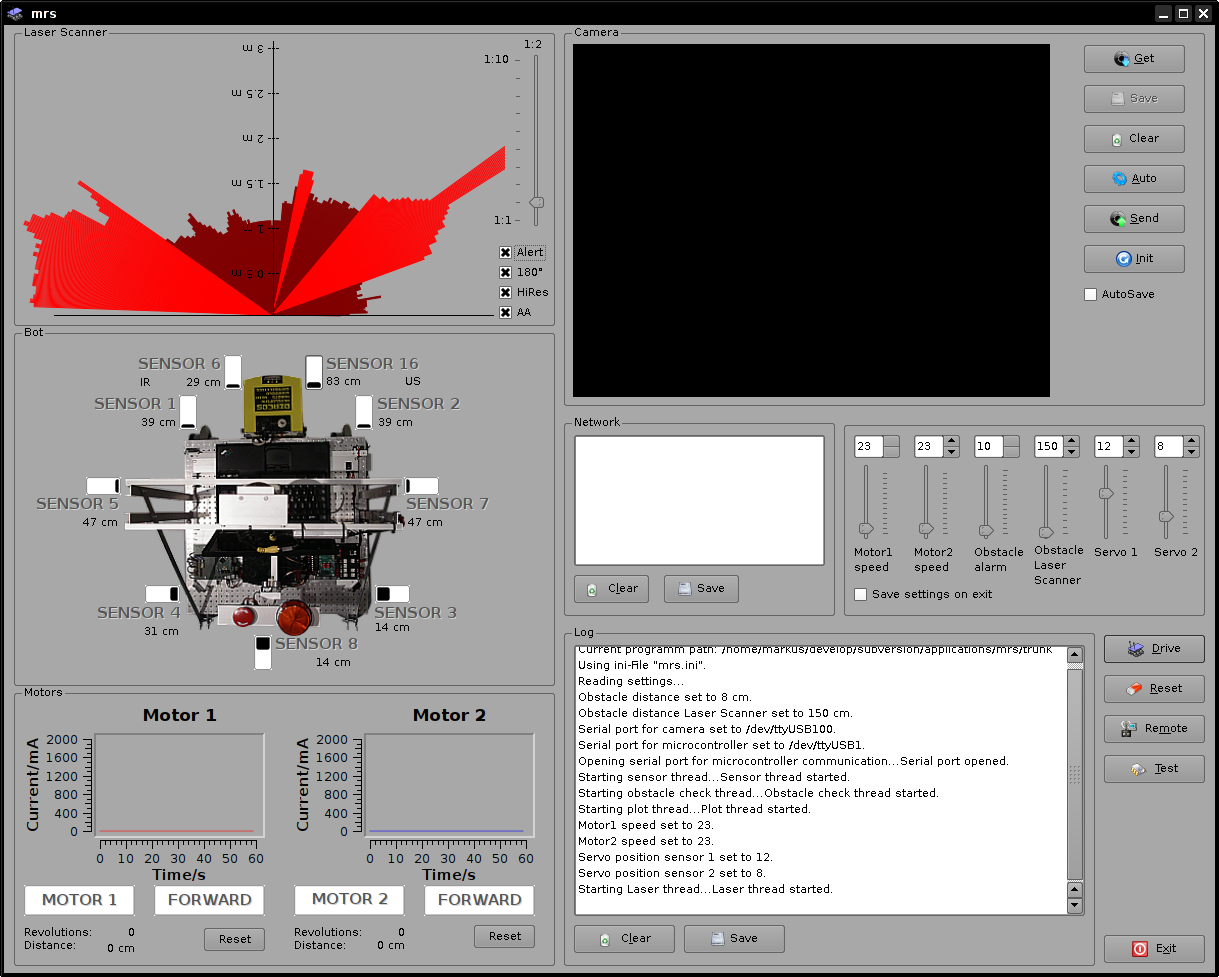
Entwicklung einer Anzeige der „Durchfahrweite“ (blaue Linie) – Scenario 1 |
|
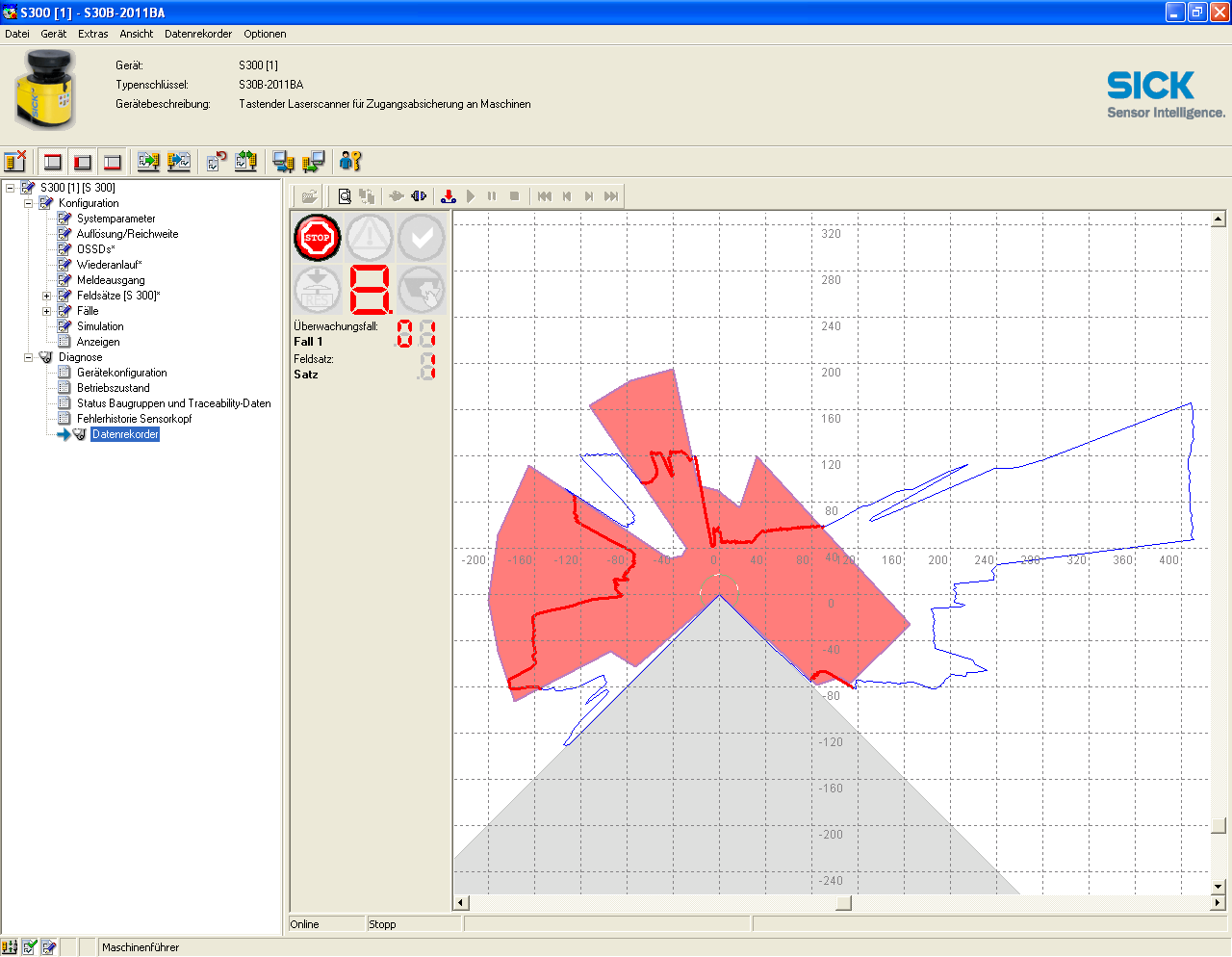
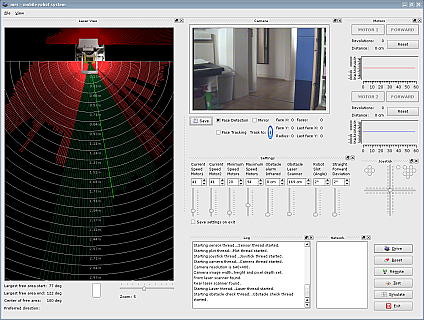
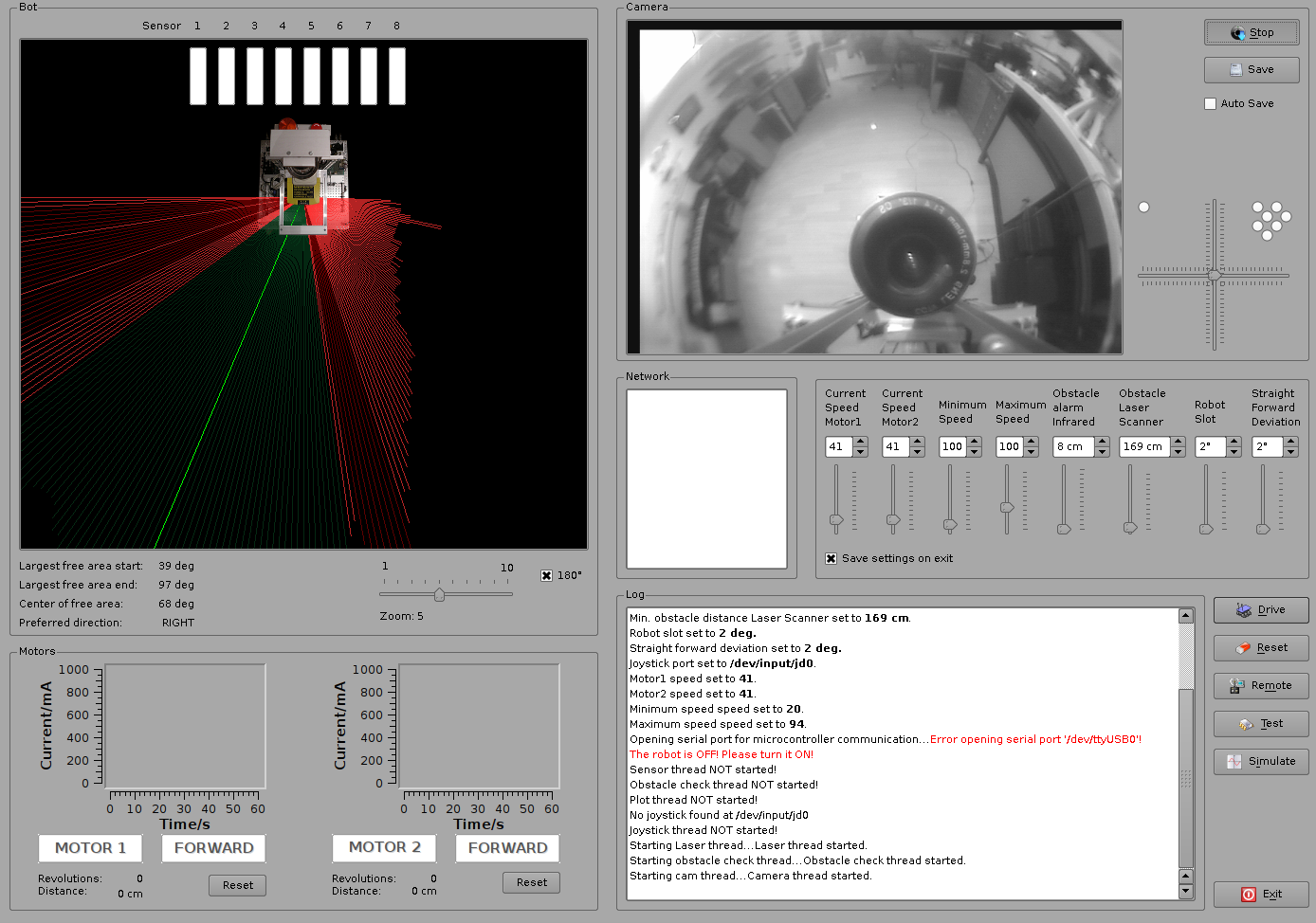
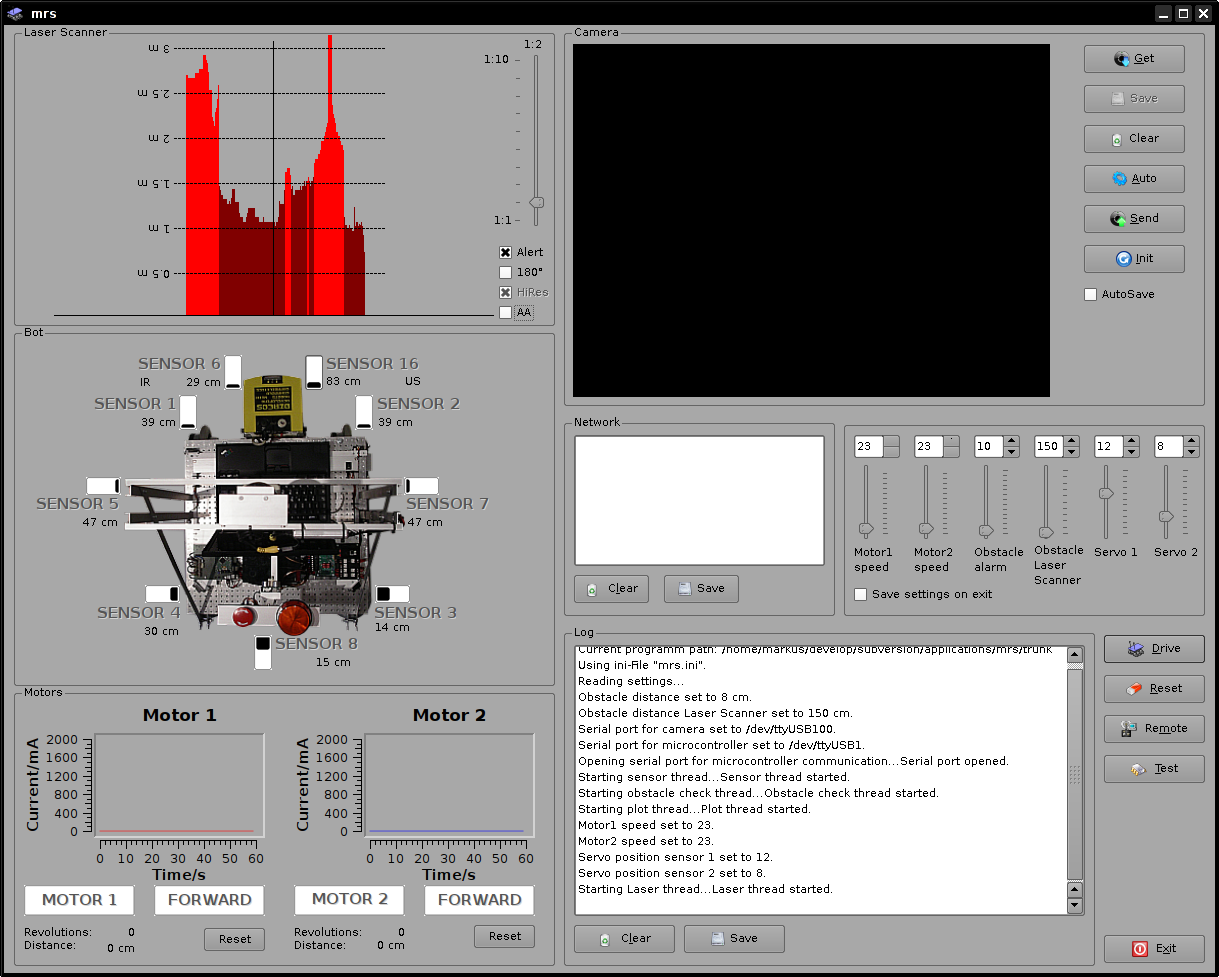
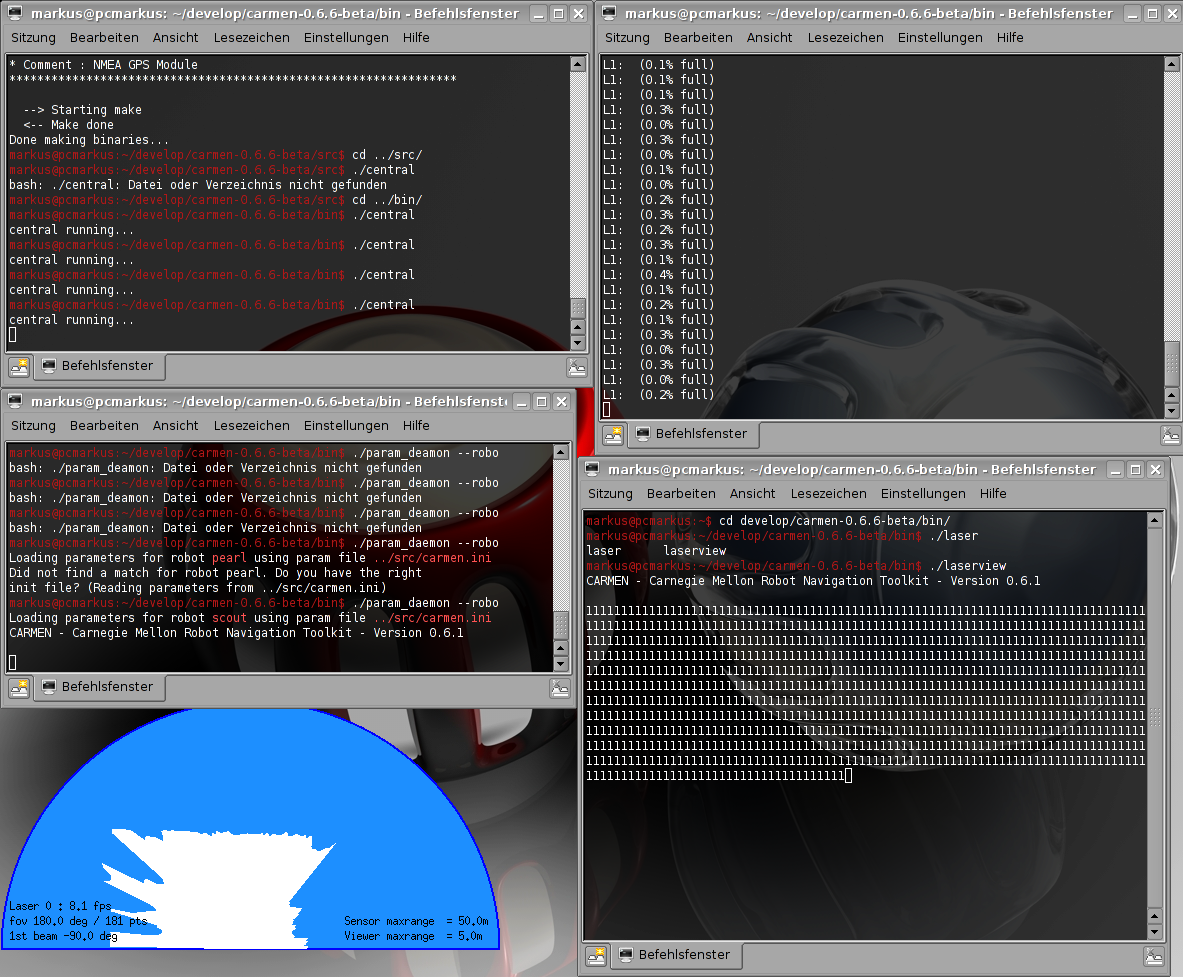
Testscreenshot des neuen Laserscanners – leider noch unter Windows. ;-) |
|
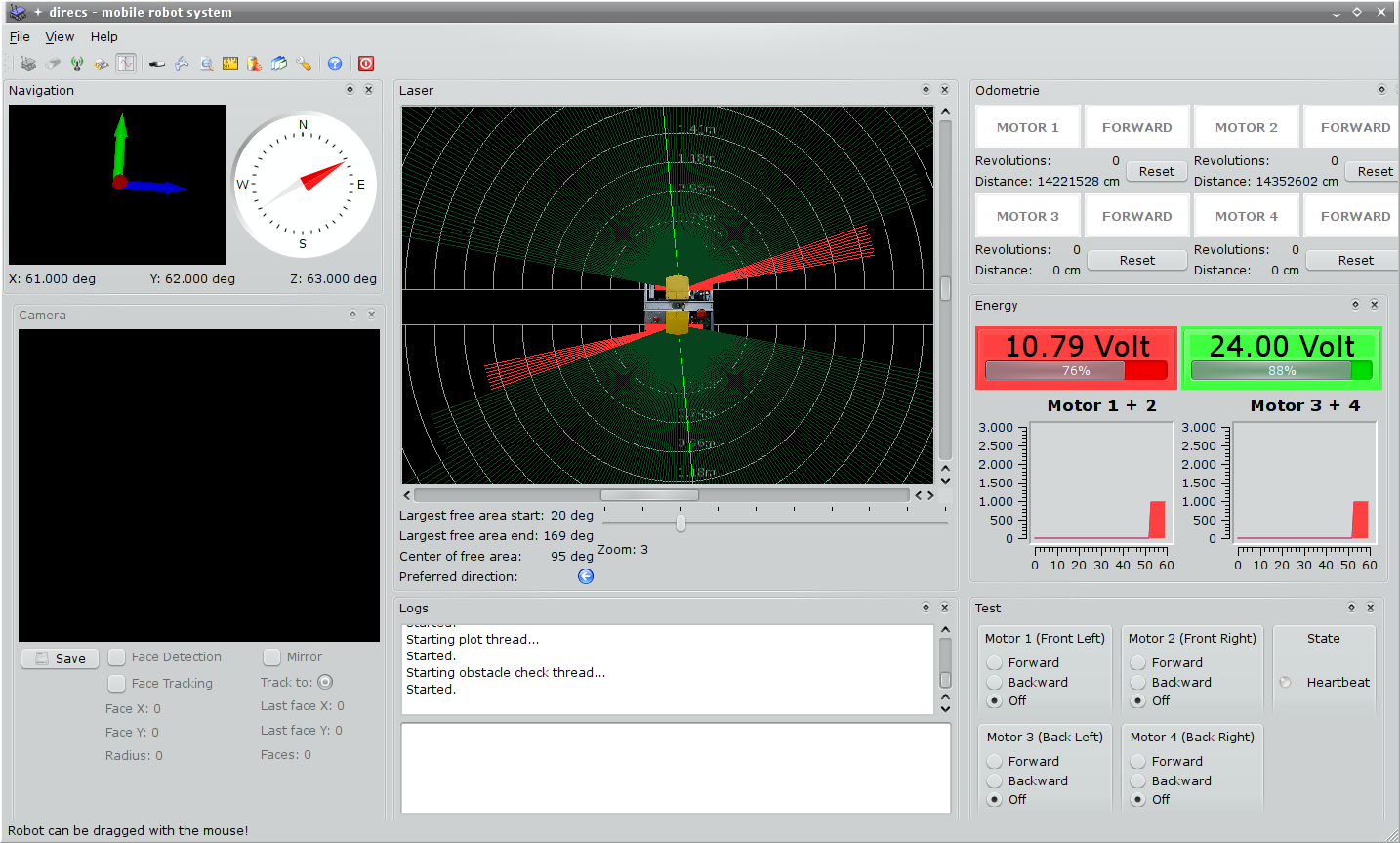
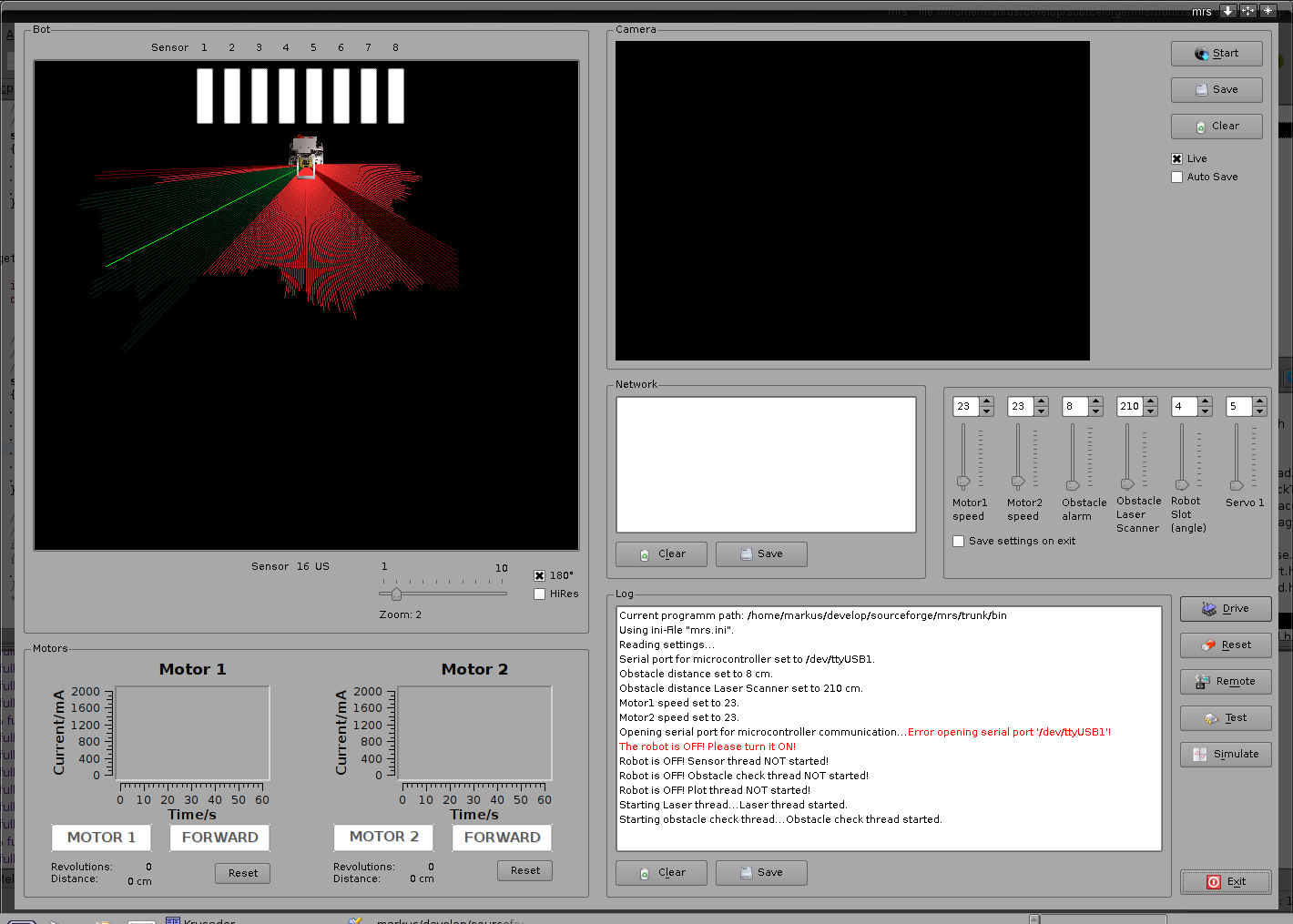
Neu hinzugekommen in diesem Screenshot: Die Messung und Anzeige der Spannungswerte für die 12 V und 24 V-Akkus. |
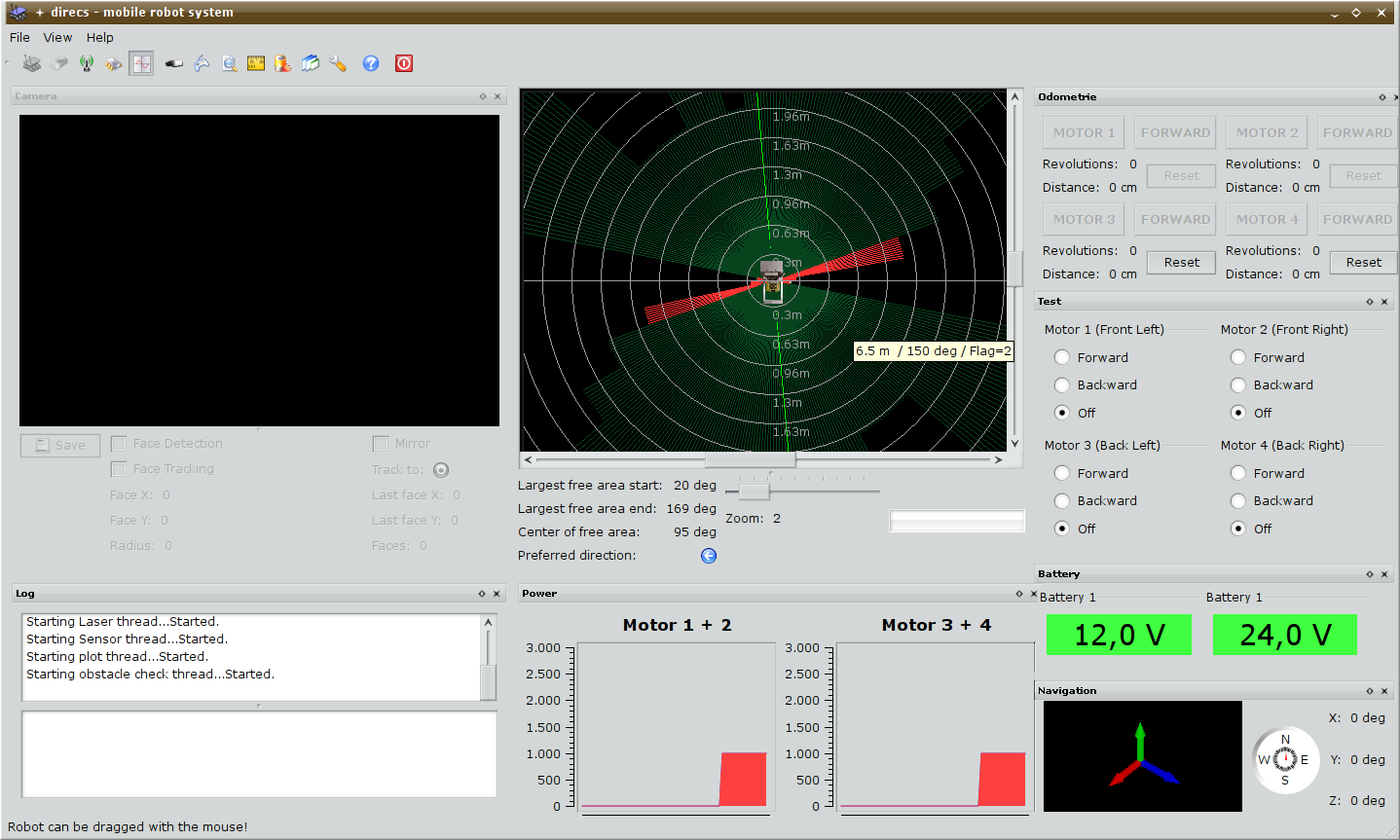 Heute wurde die OpenGL-Darstellung des 3D-Kompasses und eine 2D-Darstellung (zum Testen) hinzugefügt. Heute wurde die OpenGL-Darstellung des 3D-Kompasses und eine 2D-Darstellung (zum Testen) hinzugefügt.01.05.2009 |
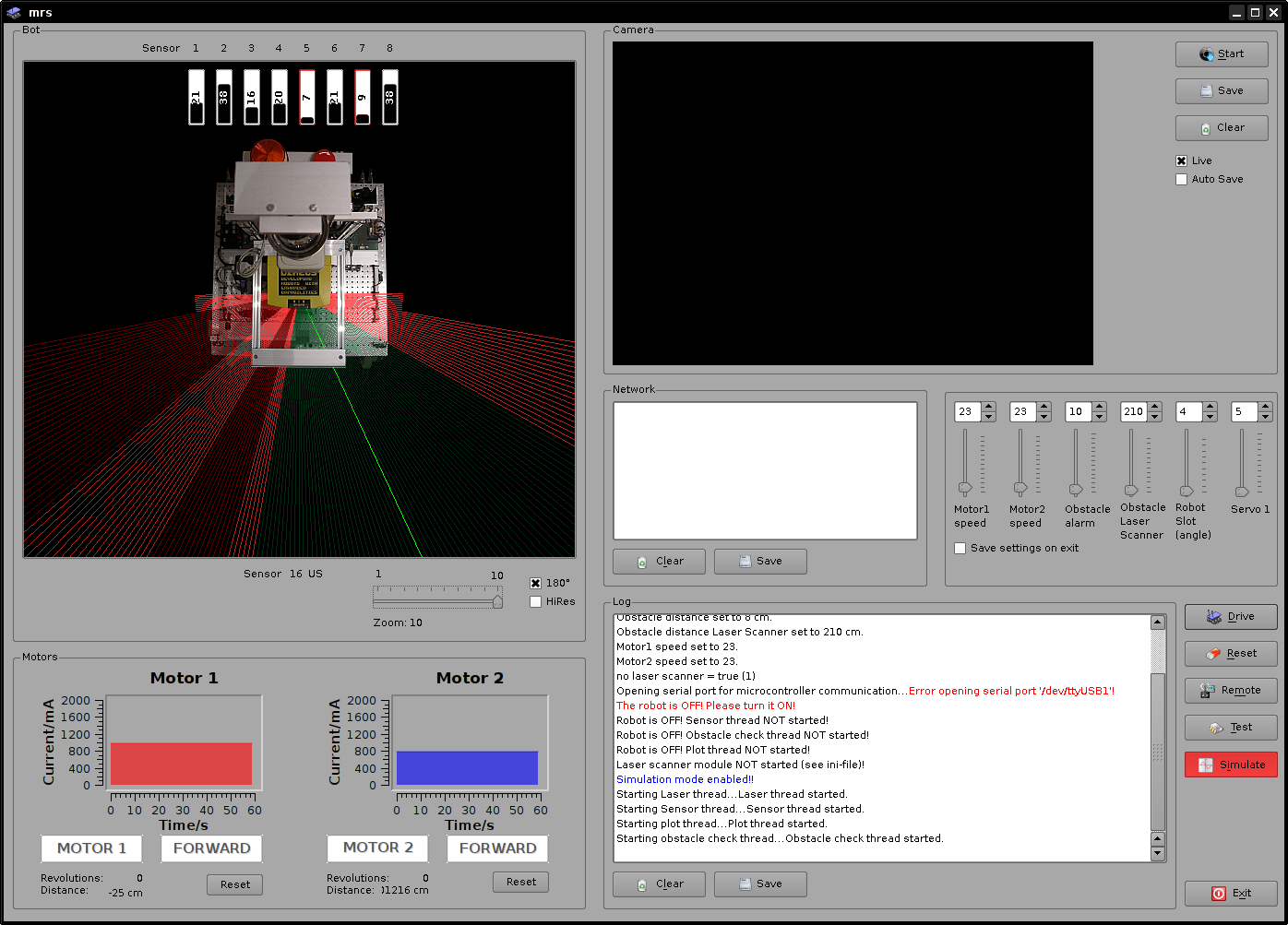
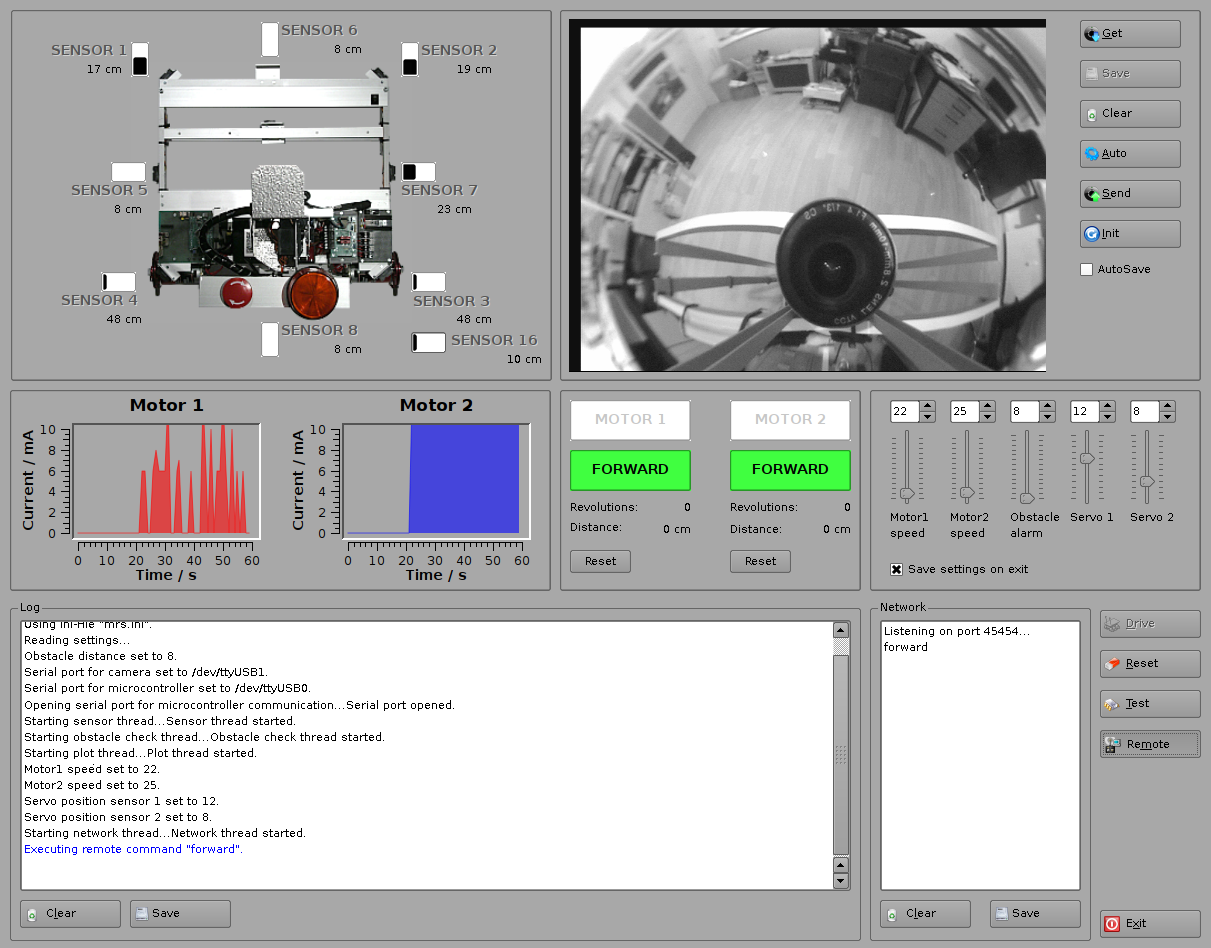
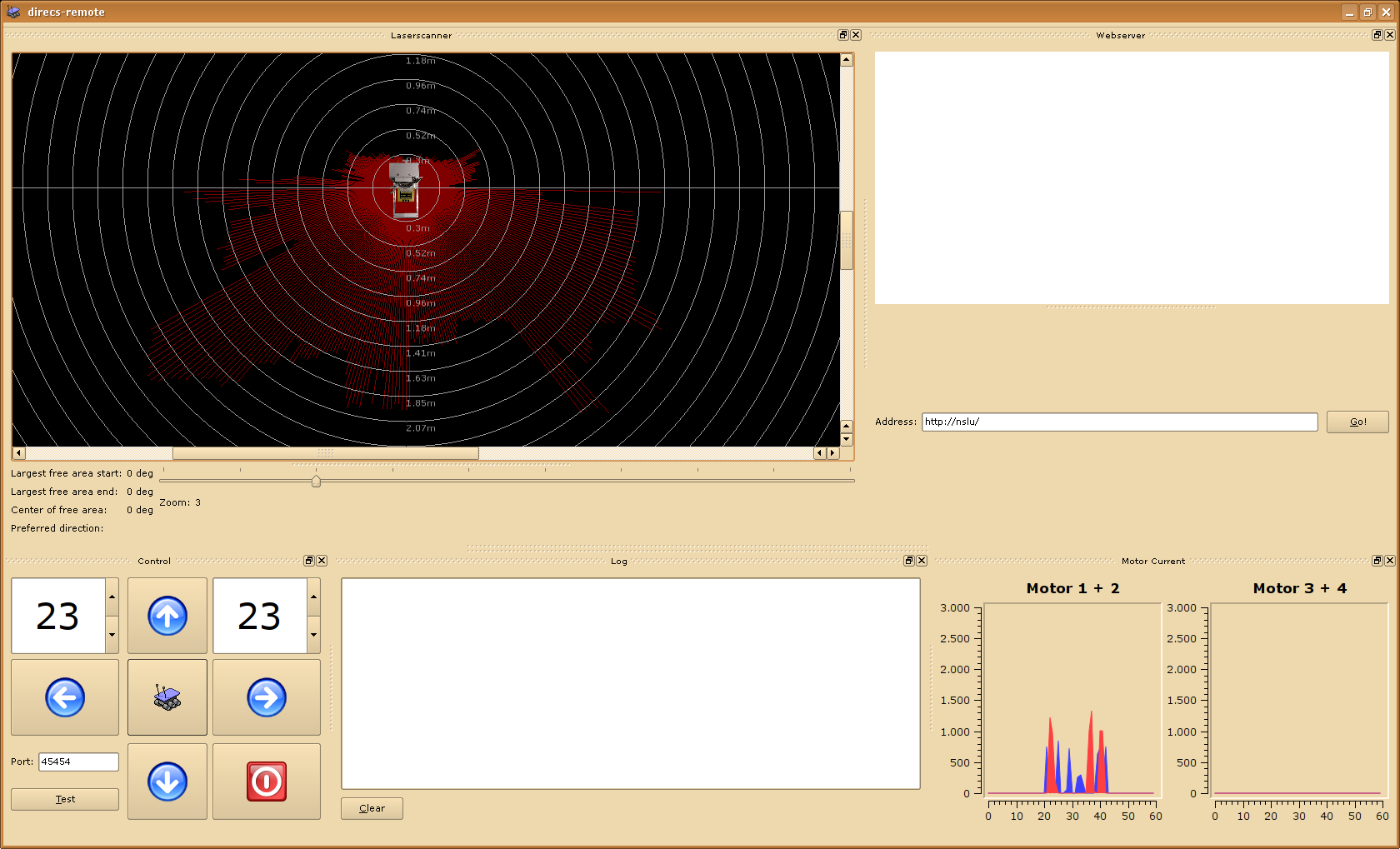 Das DIRECS remote Programm zeigt nun über das Netzwerk(!) die Daten der Laserscanner und die Stromverbrauchsdaten der Motoren an. Das DIRECS remote Programm zeigt nun über das Netzwerk(!) die Daten der Laserscanner und die Stromverbrauchsdaten der Motoren an. |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |