|
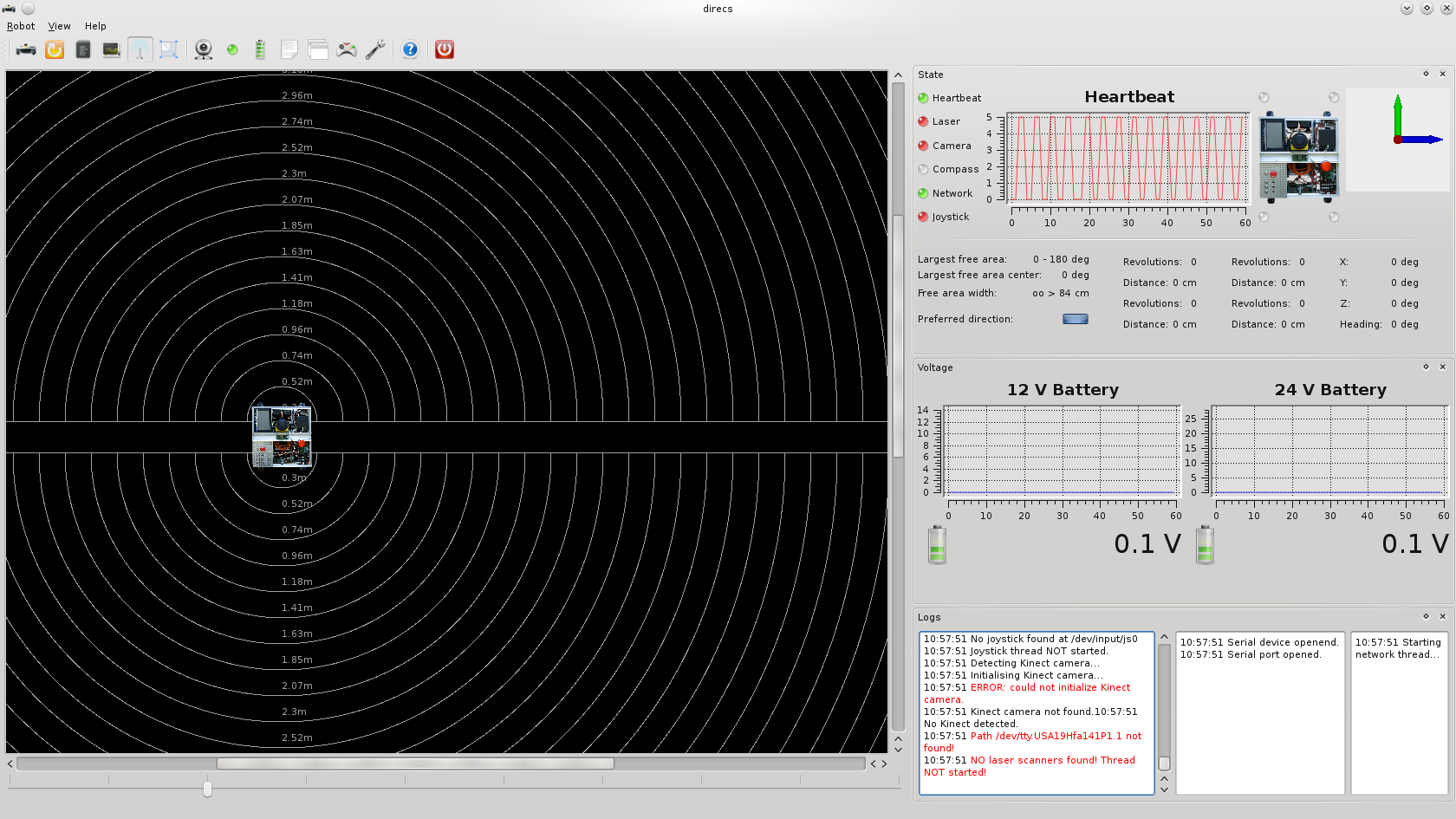
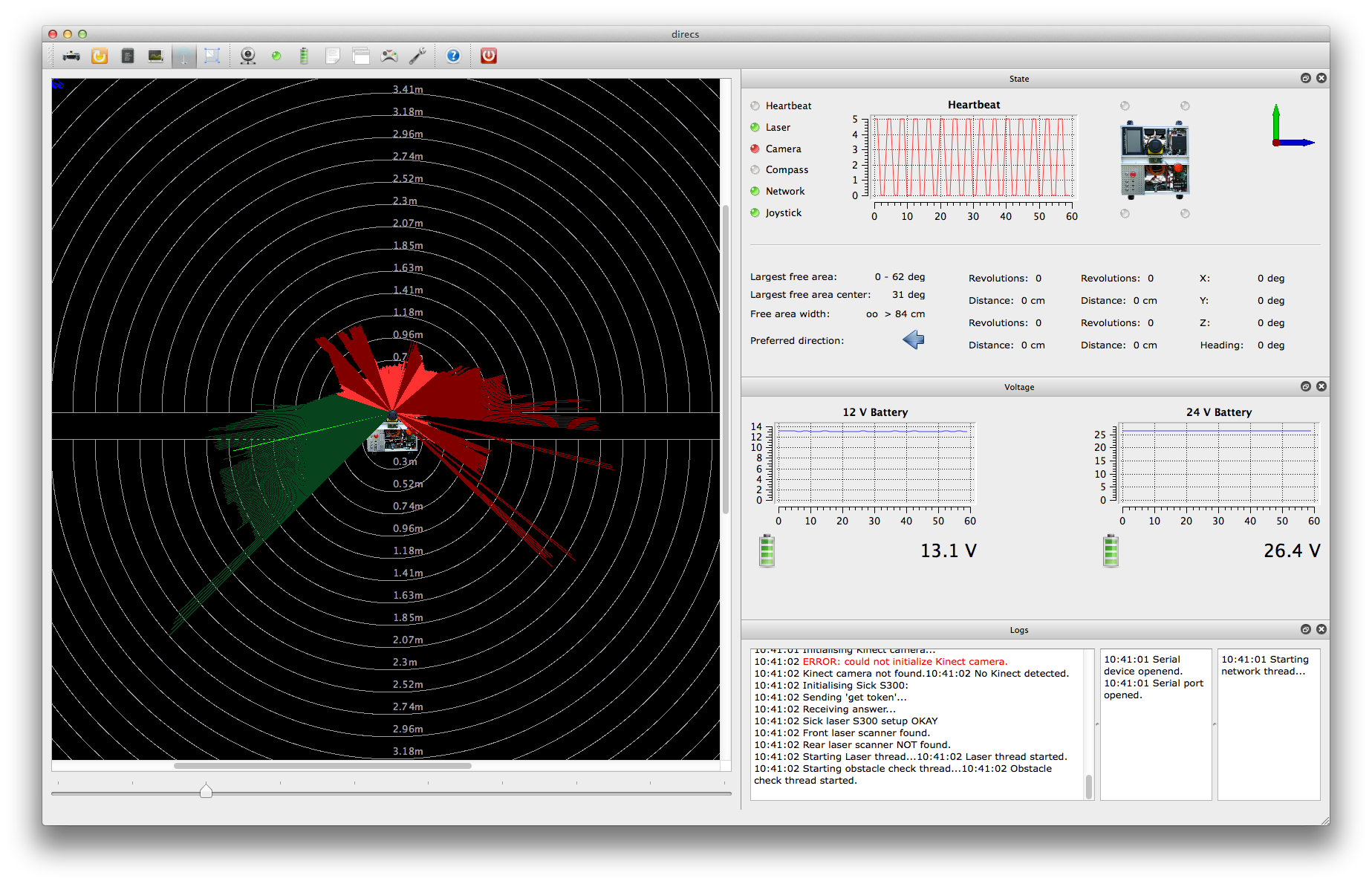
Zwei aktuelle Screenshots – einmal der erste Test mit dem neuen ARM-Board unter Linux in der Debian-VM (Parallels unter Mac OS X), der zweite nativ auf dem Mac. |
|
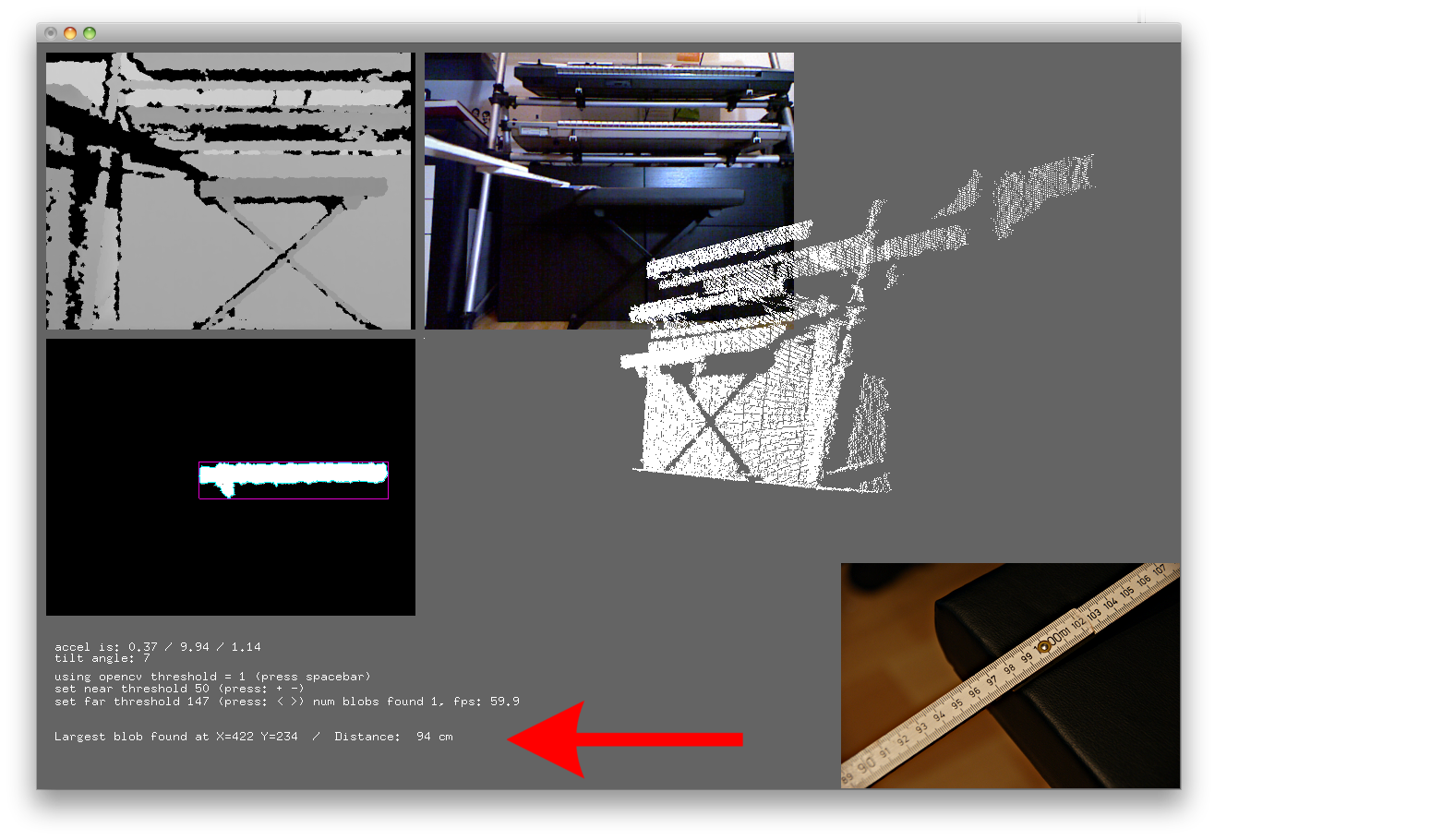
Erste Experimente mit der Microsoft Kinect Kamera und dem OpenKinect / libfreenect Sourcecode. |
|
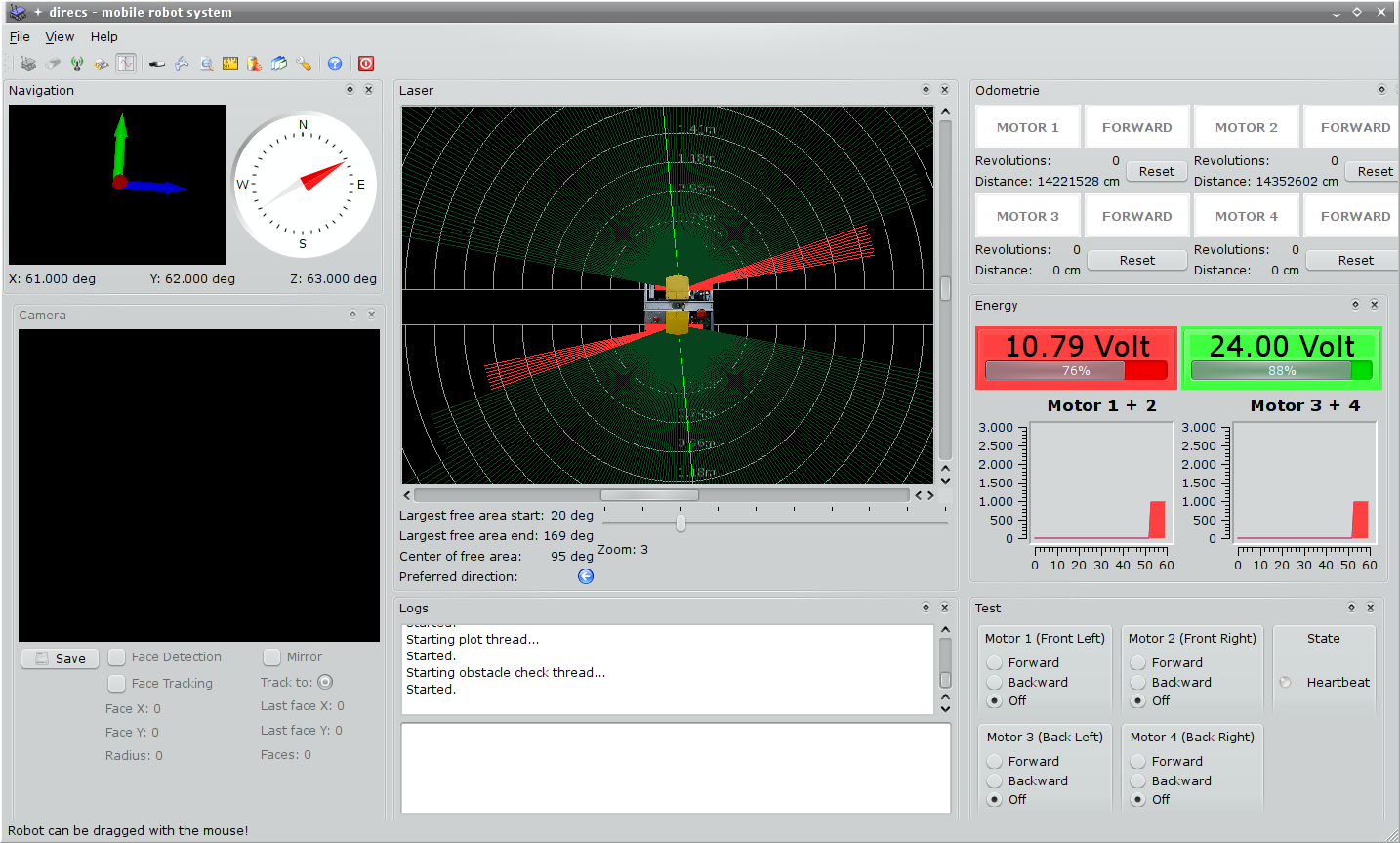
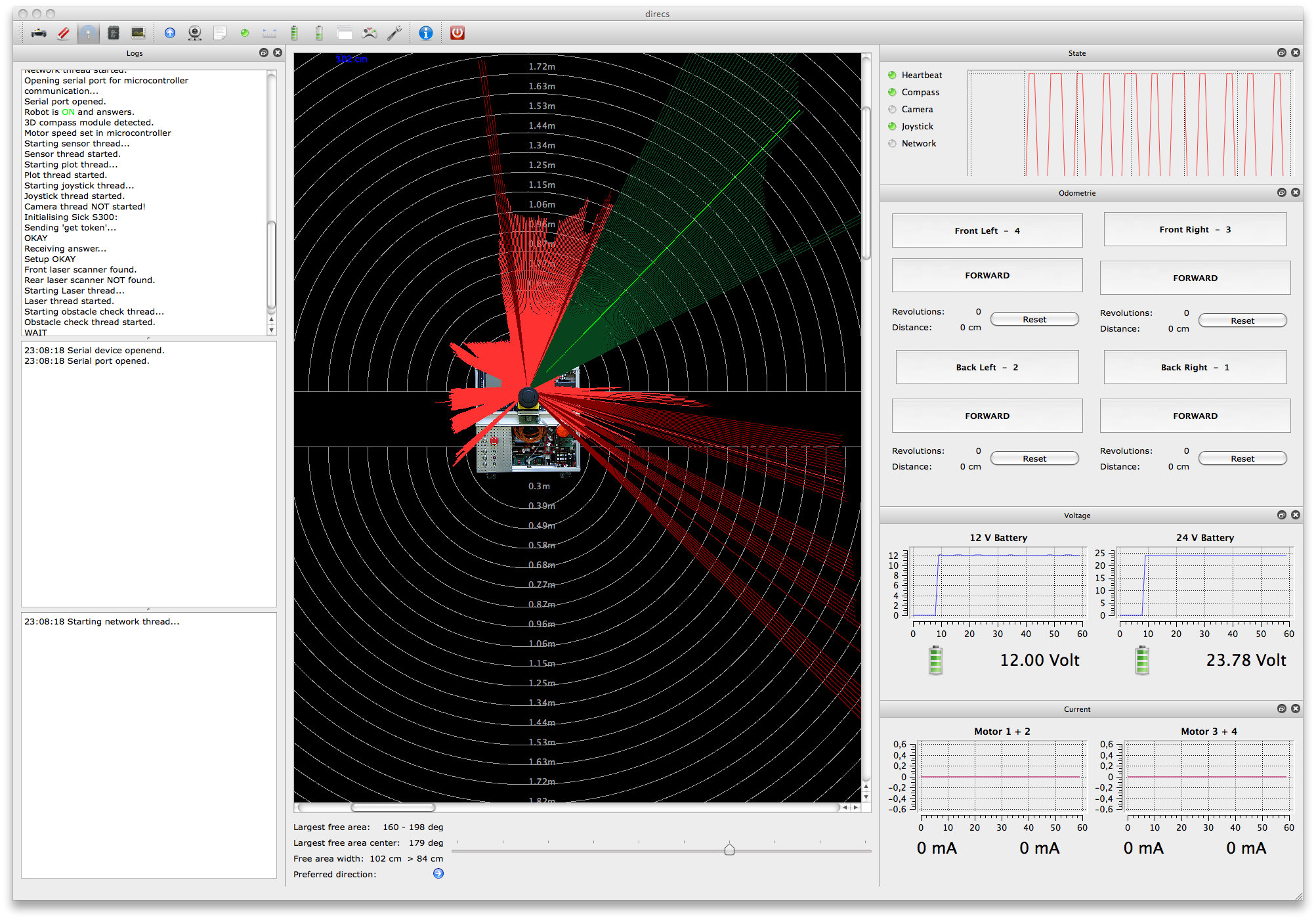
Größeres Redesing: Grafischen Heartbeat korrigiert, Roboter-Motor-Status wird nun grafisch rechts oben angezeigt (mit GUI LEDs), Änderung der Hauptfenstergröße zur Anzeigen auf dem MacBook Pro. |
|
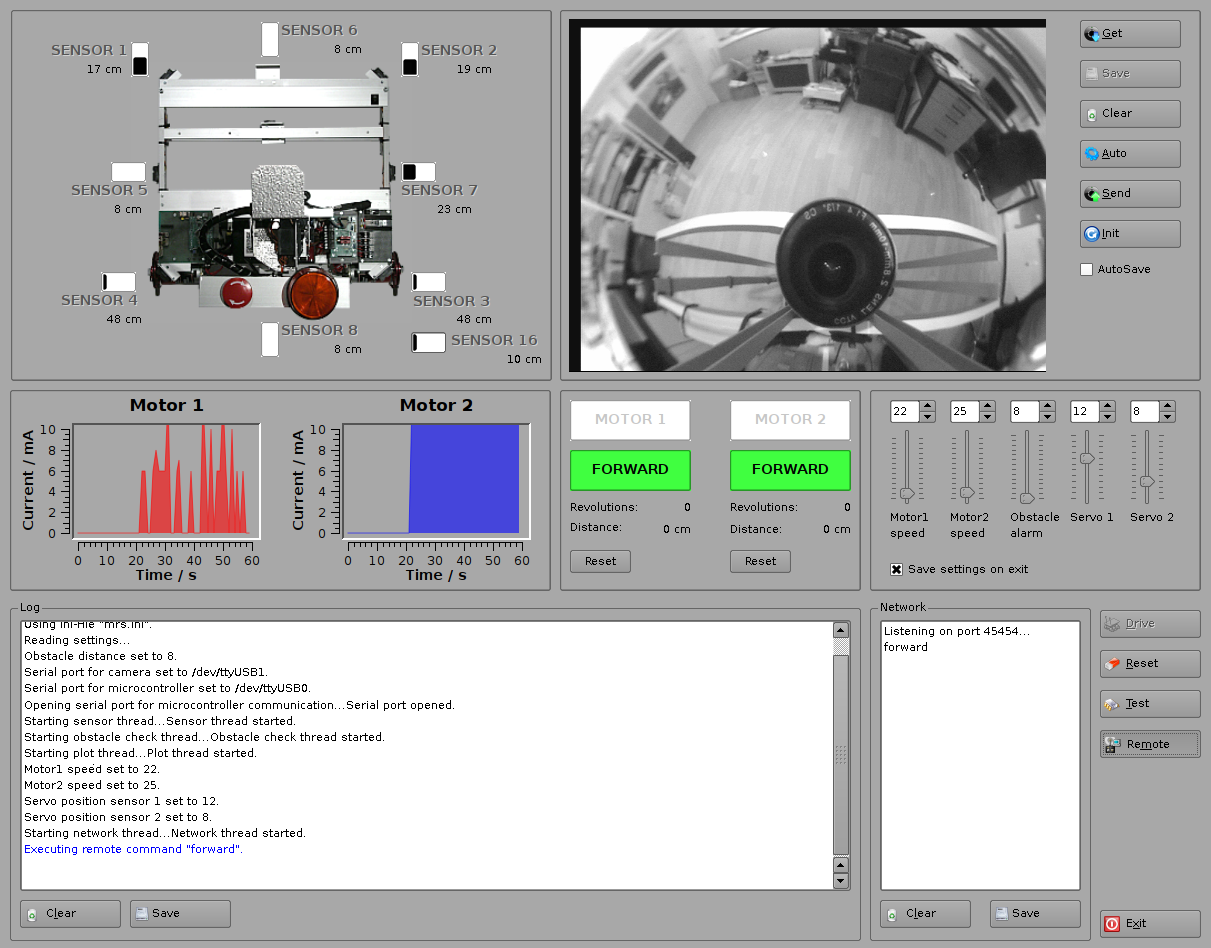
Kleine Verbesserungen in der GUI: Grafische LEDs über den Zustand diverser Module im „state“ Bereich rechts oben, Gitternetzlinien innerhalb der Plot-Fenster (Batteriespannungen) und ein grafischer Heartbeat (rot). |
Kategorie: Screenshot
Screenshots mrs1
|
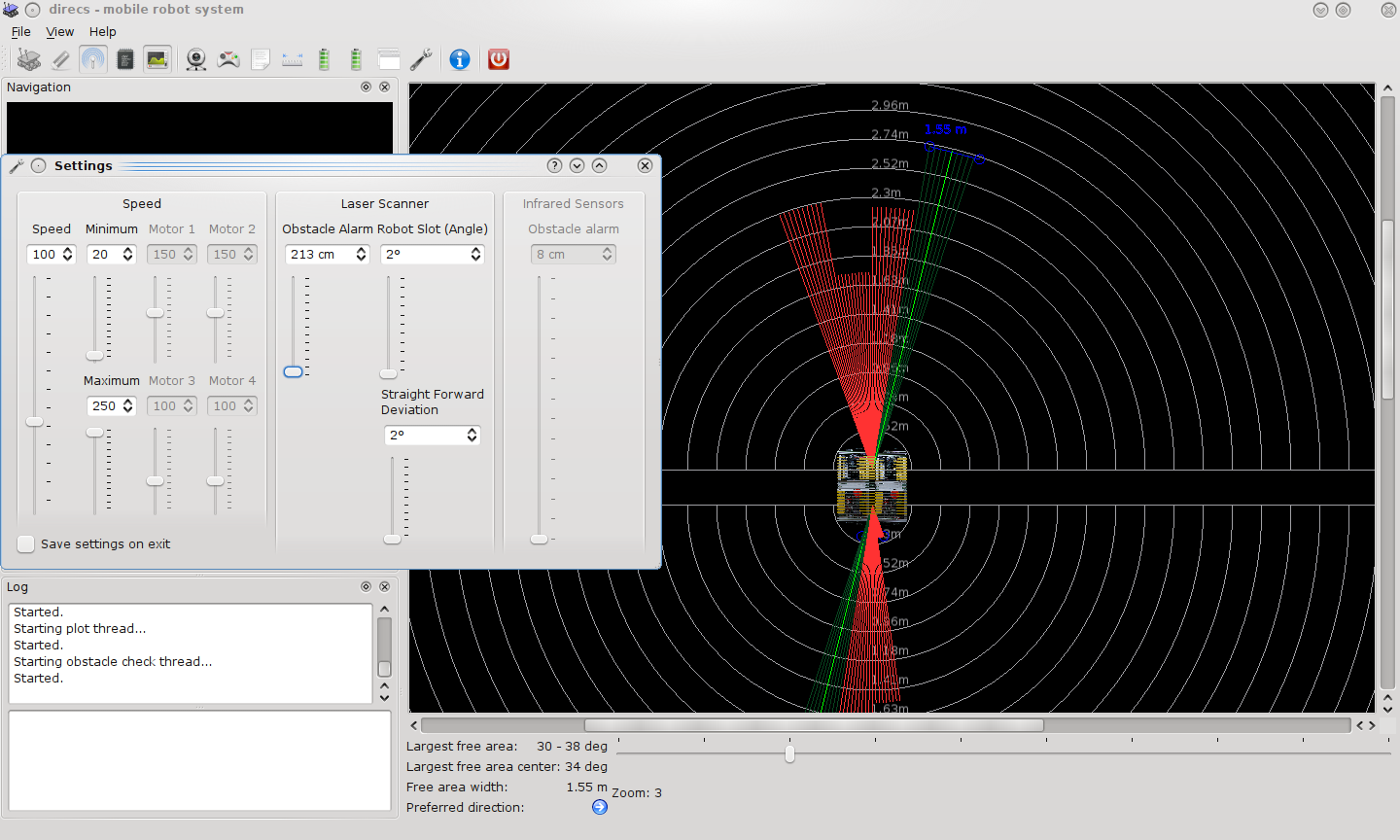
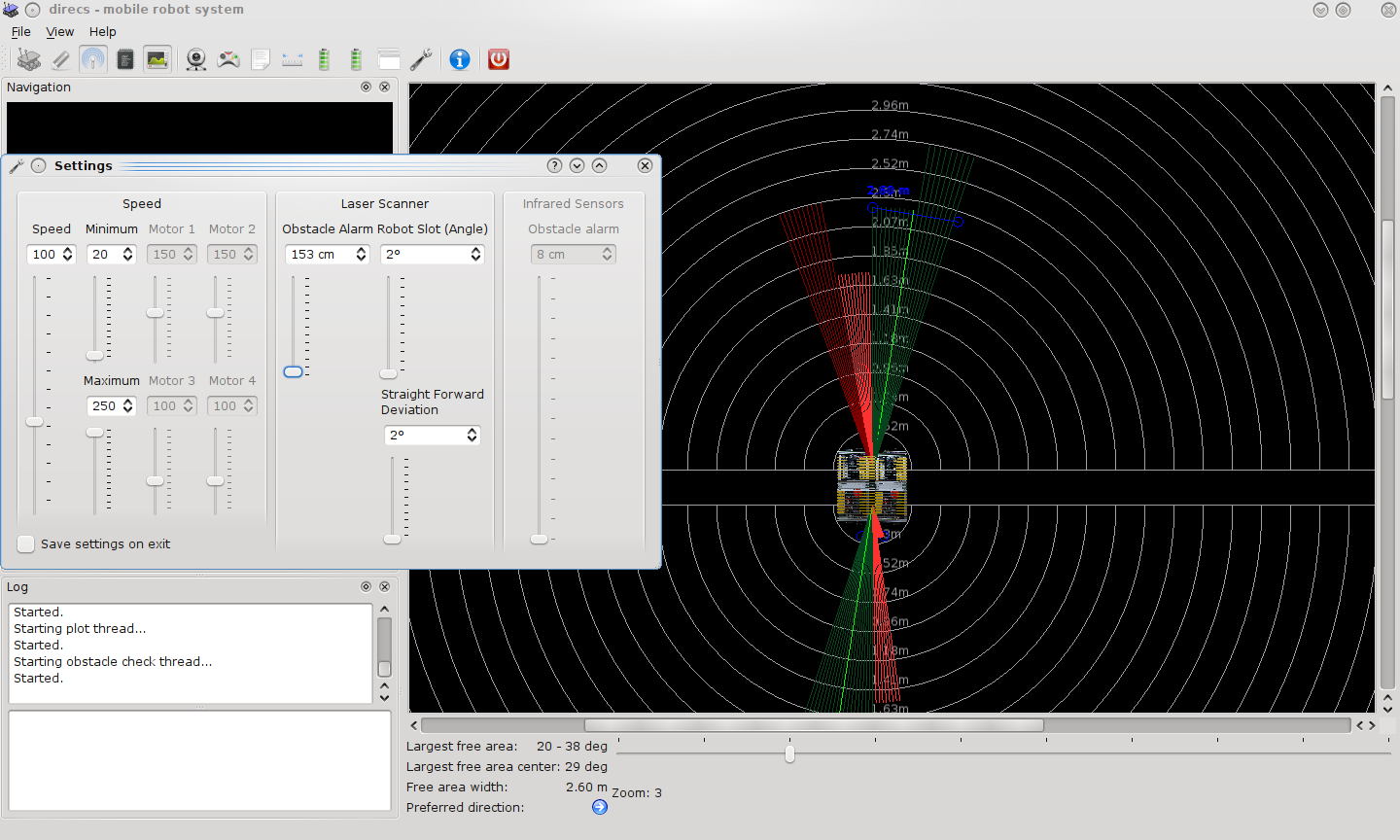
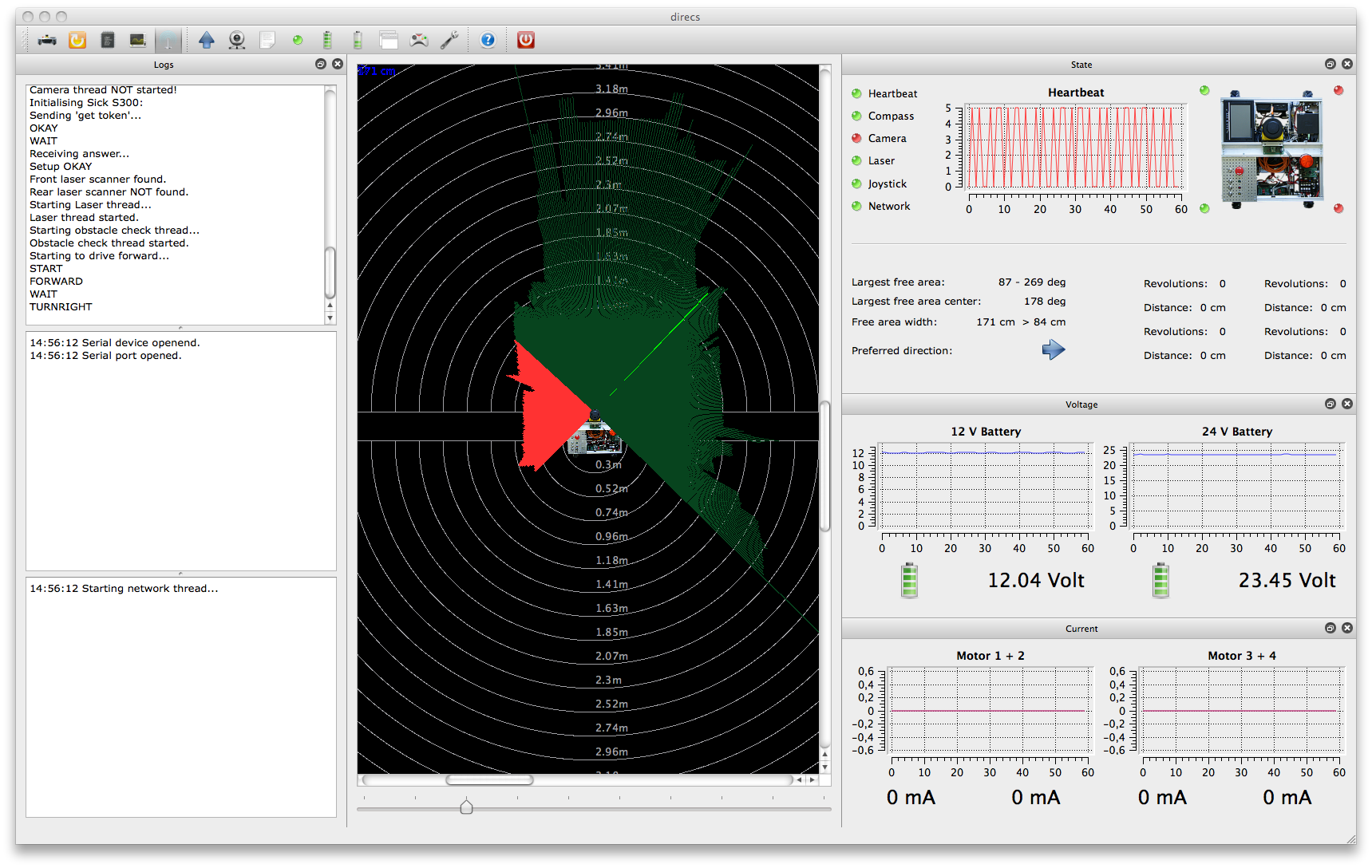
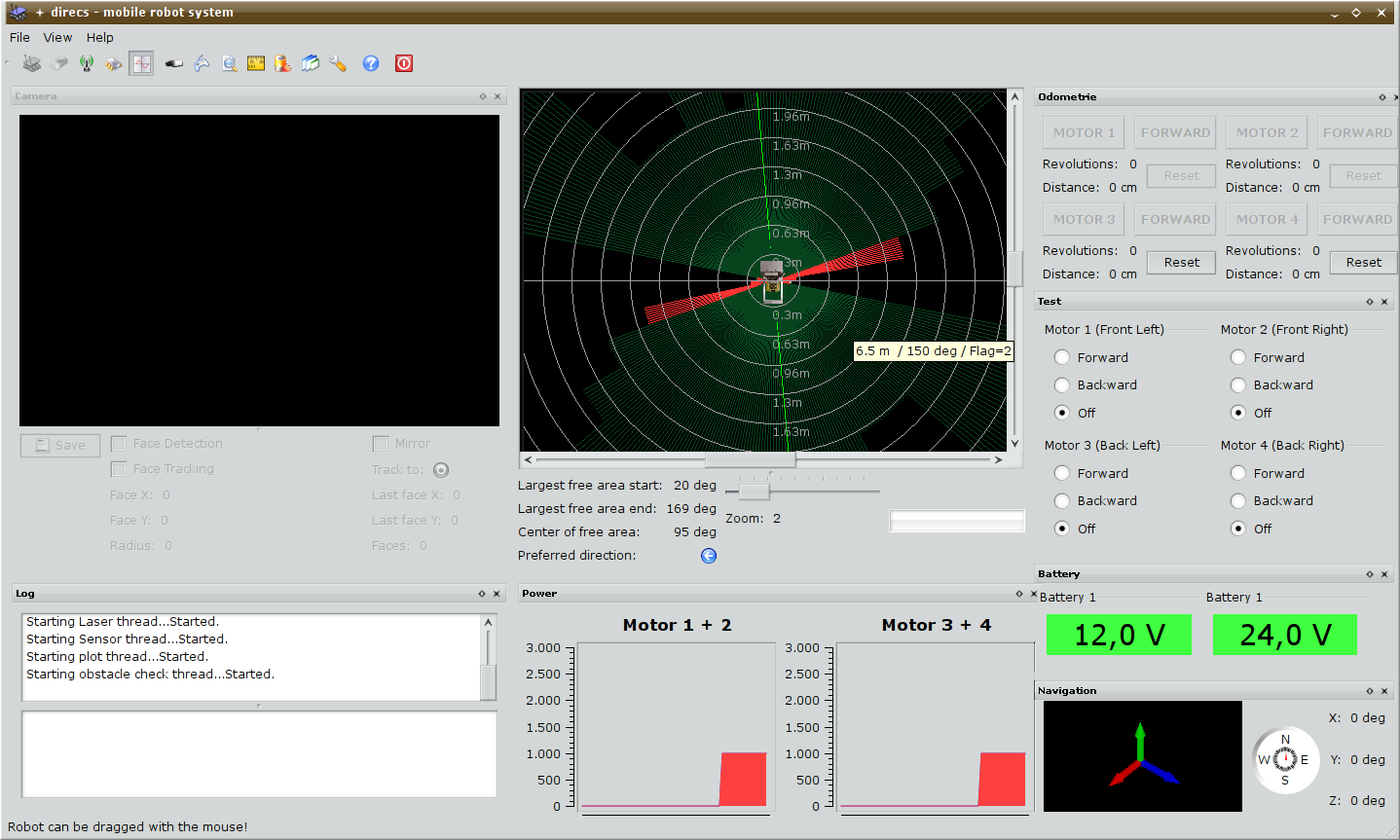
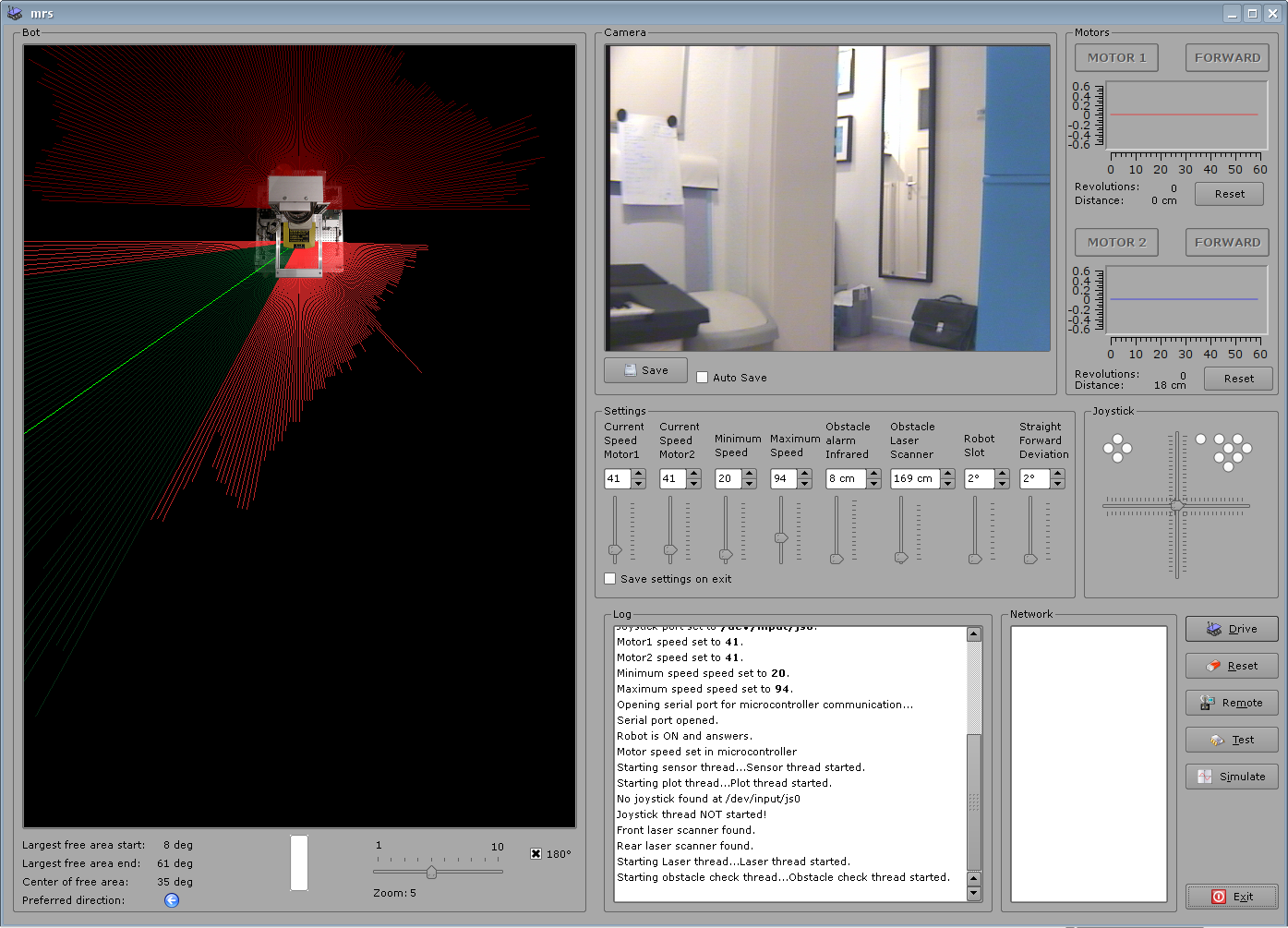
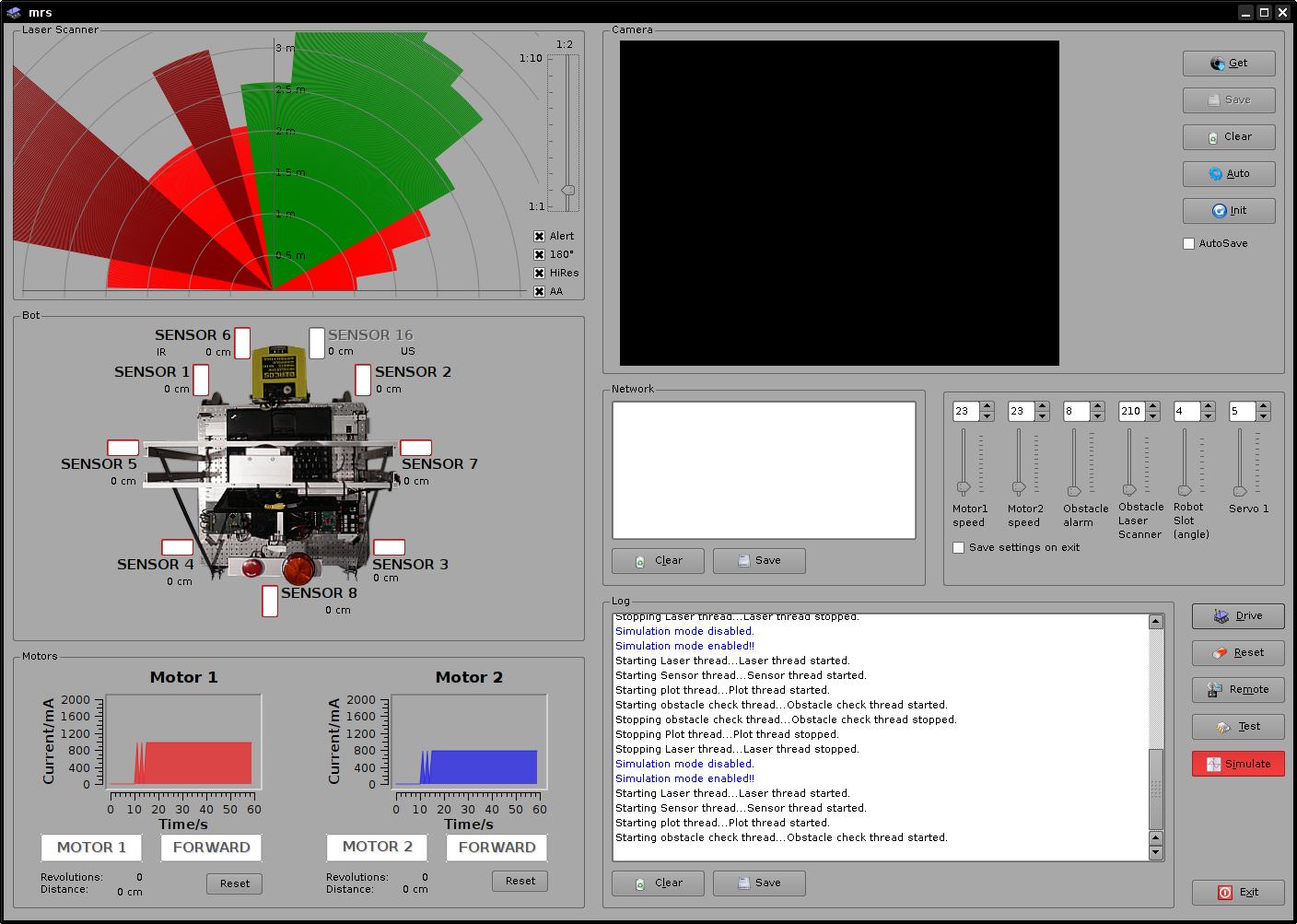
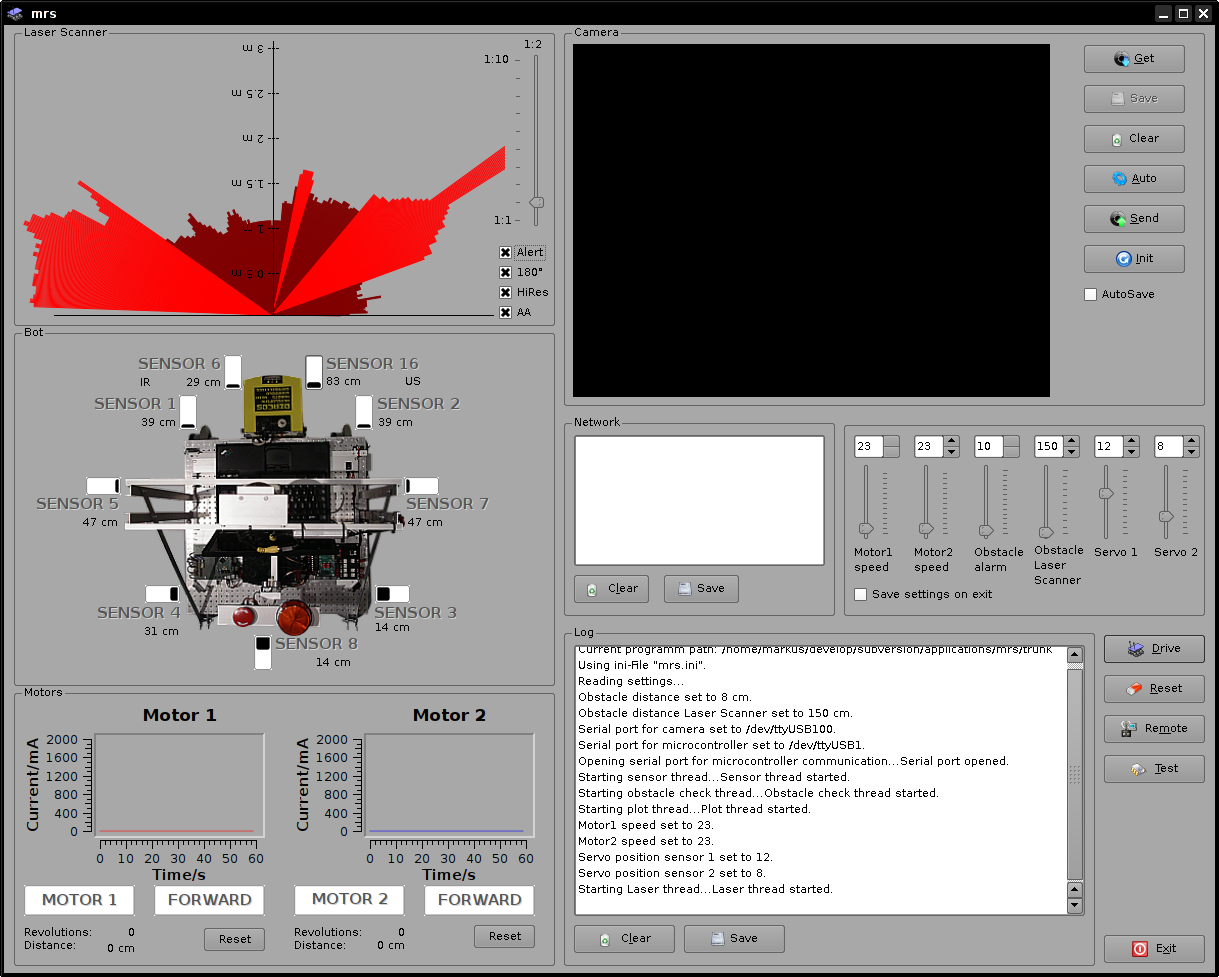
Entwicklung einer Anzeige der „Durchfahrweite“ (blaue Linie) – Scenario 2 |
|
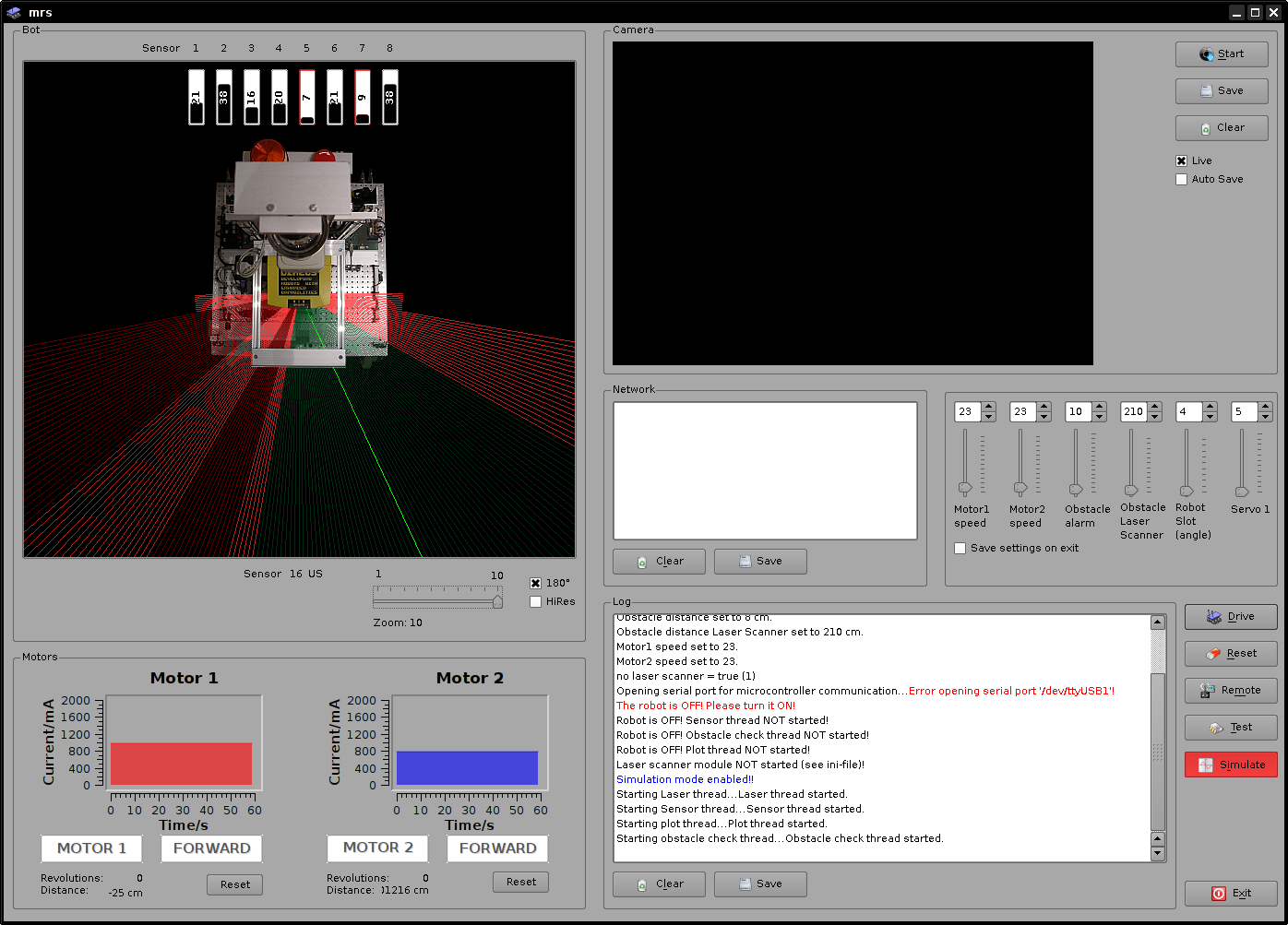
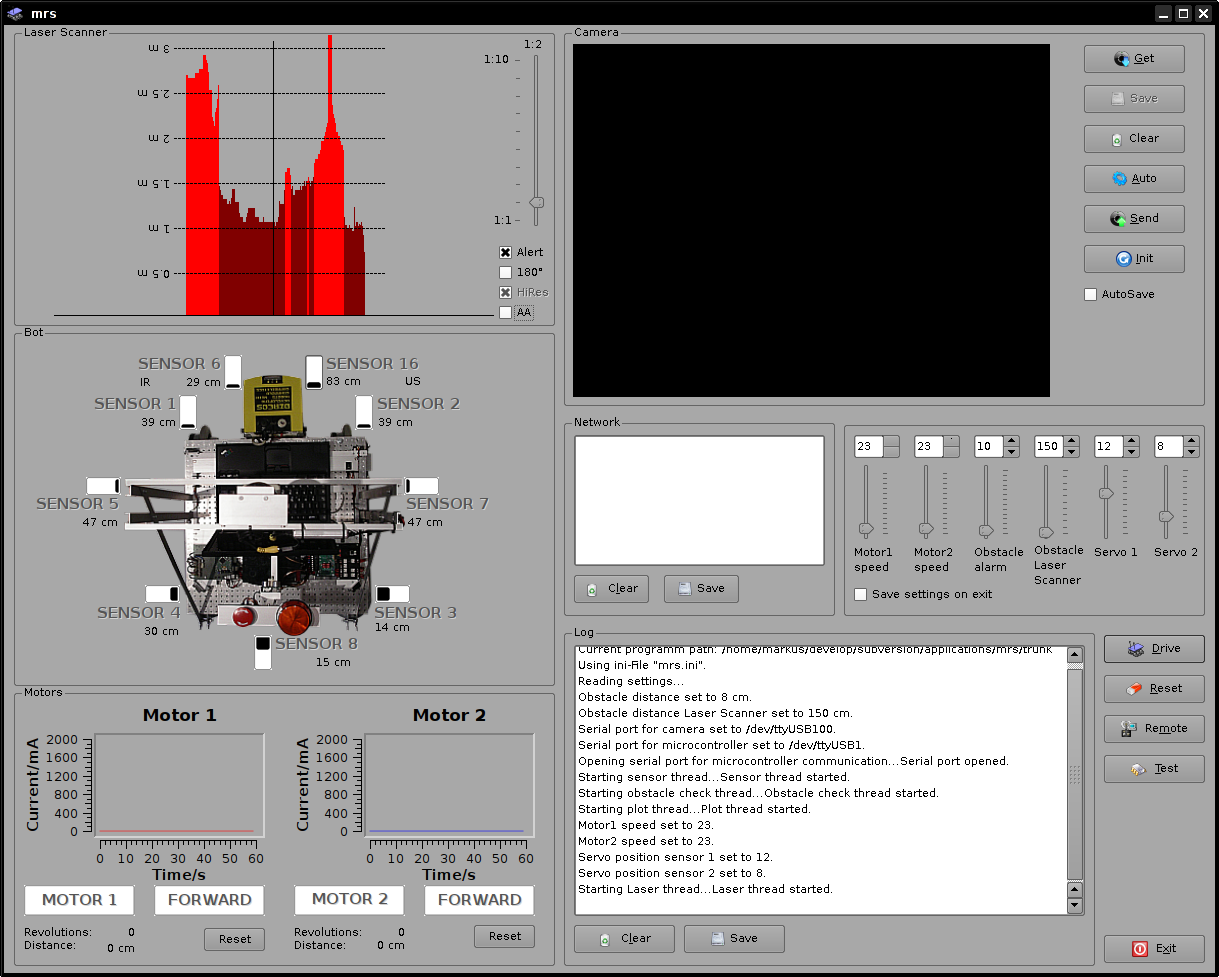
Entwicklung einer Anzeige der „Durchfahrweite“ (blaue Linie) – Scenario 1 |
|
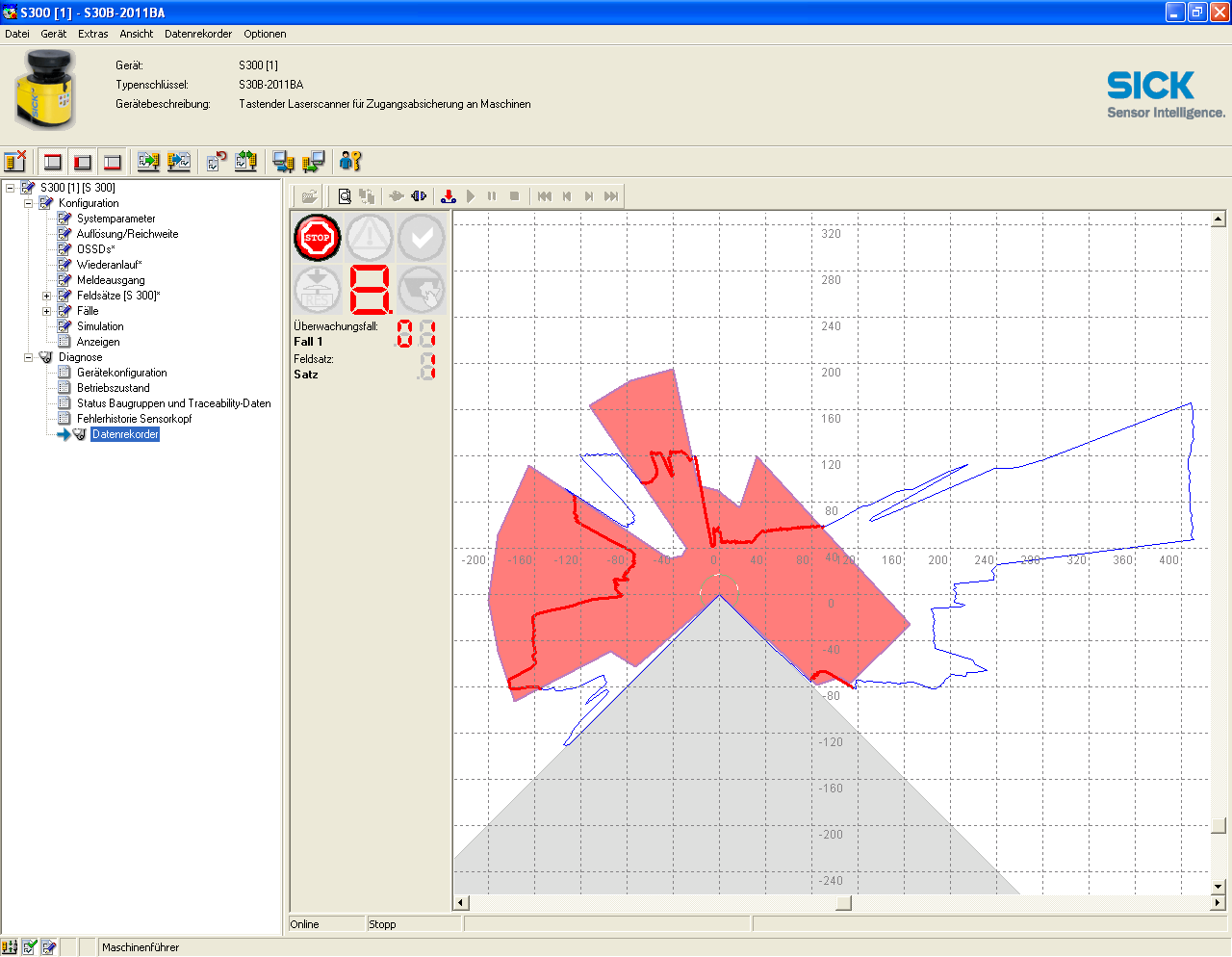
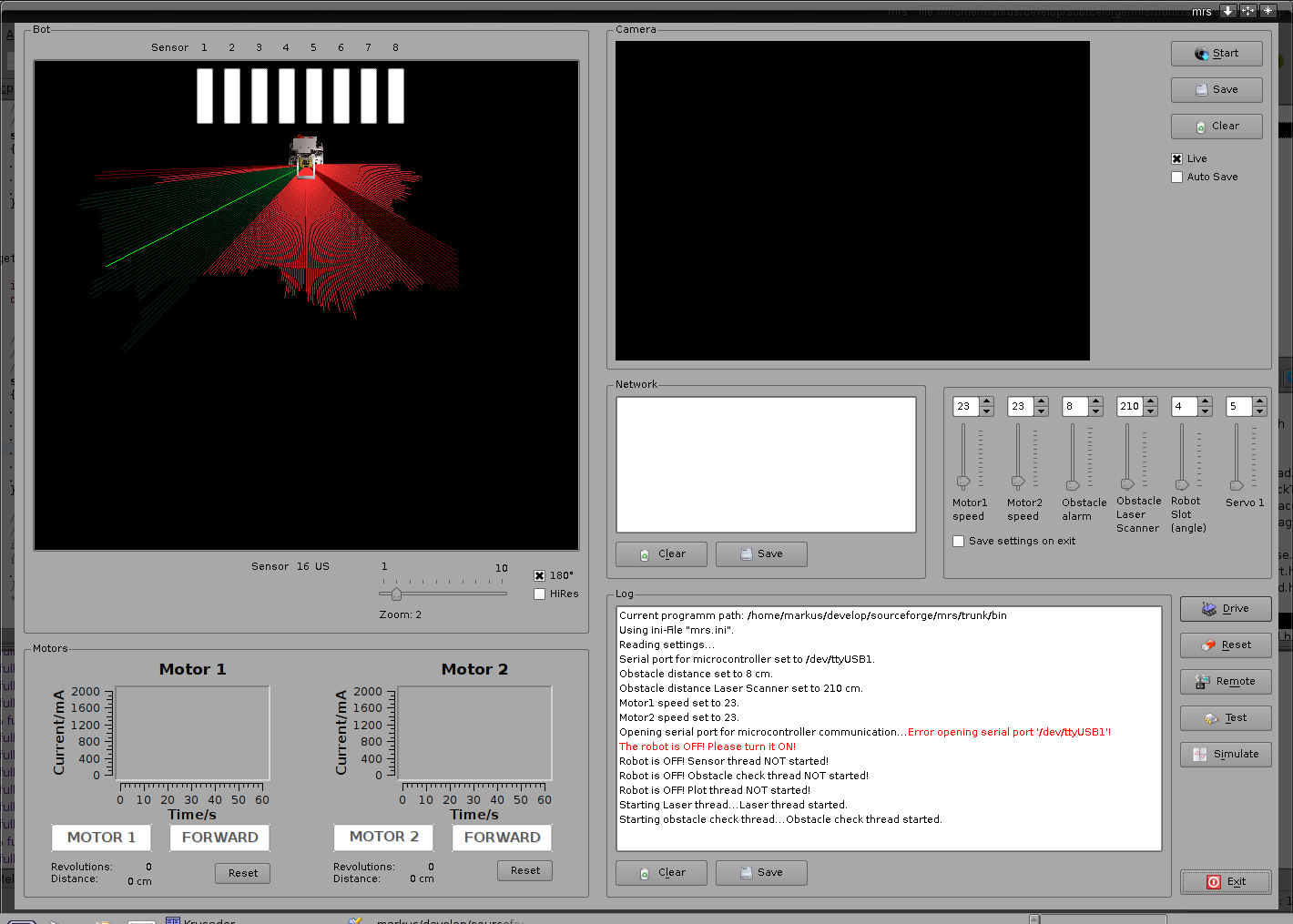
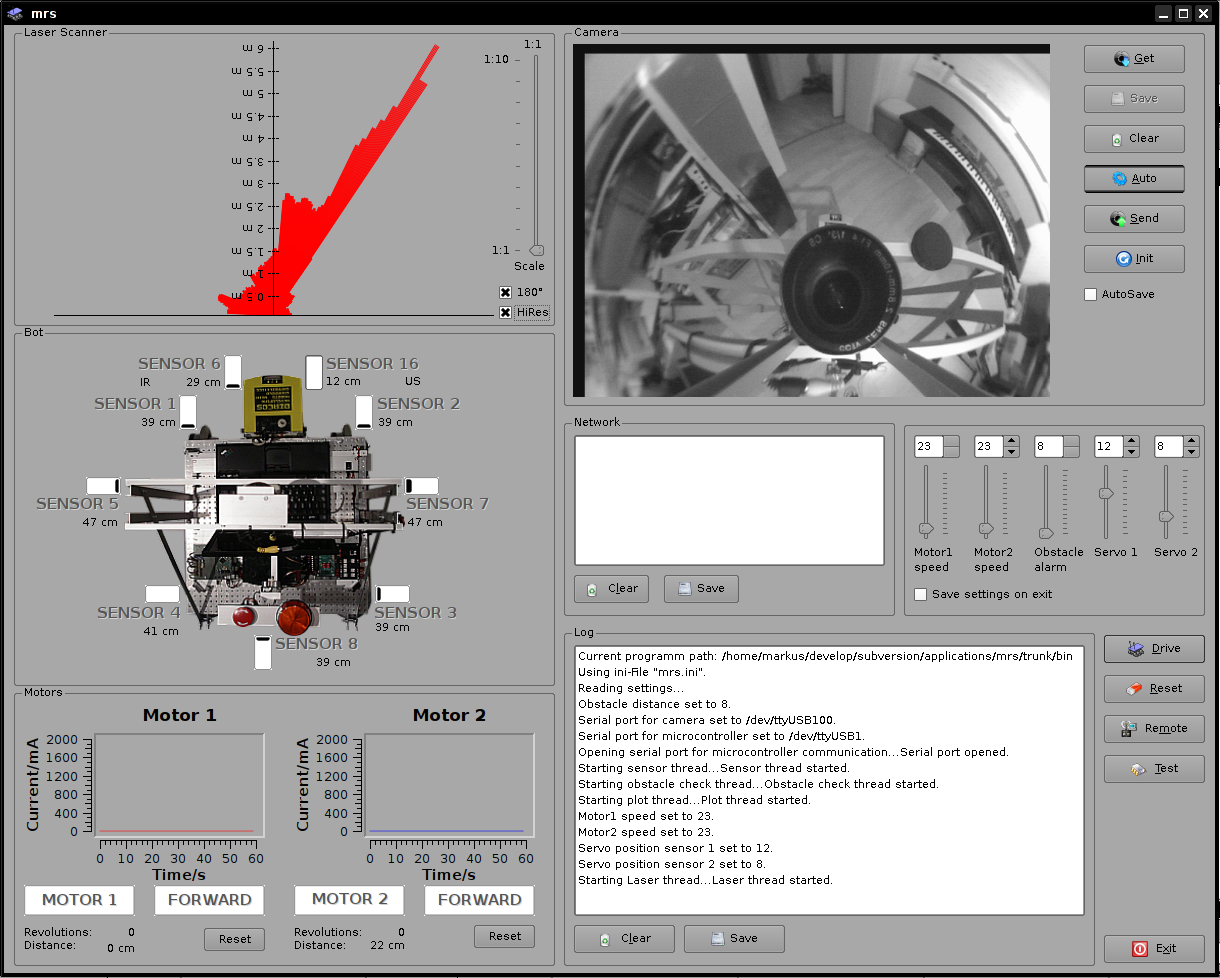
Testscreenshot des neuen Laserscanners – leider noch unter Windows. ;-) |
|
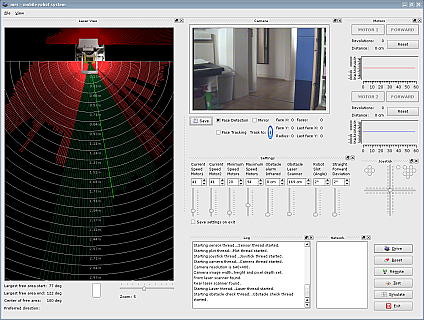
Neu hinzugekommen in diesem Screenshot: Die Messung und Anzeige der Spannungswerte für die 12 V und 24 V-Akkus. |
 Heute wurde die OpenGL-Darstellung des 3D-Kompasses und eine 2D-Darstellung (zum Testen) hinzugefügt. Heute wurde die OpenGL-Darstellung des 3D-Kompasses und eine 2D-Darstellung (zum Testen) hinzugefügt.01.05.2009 |
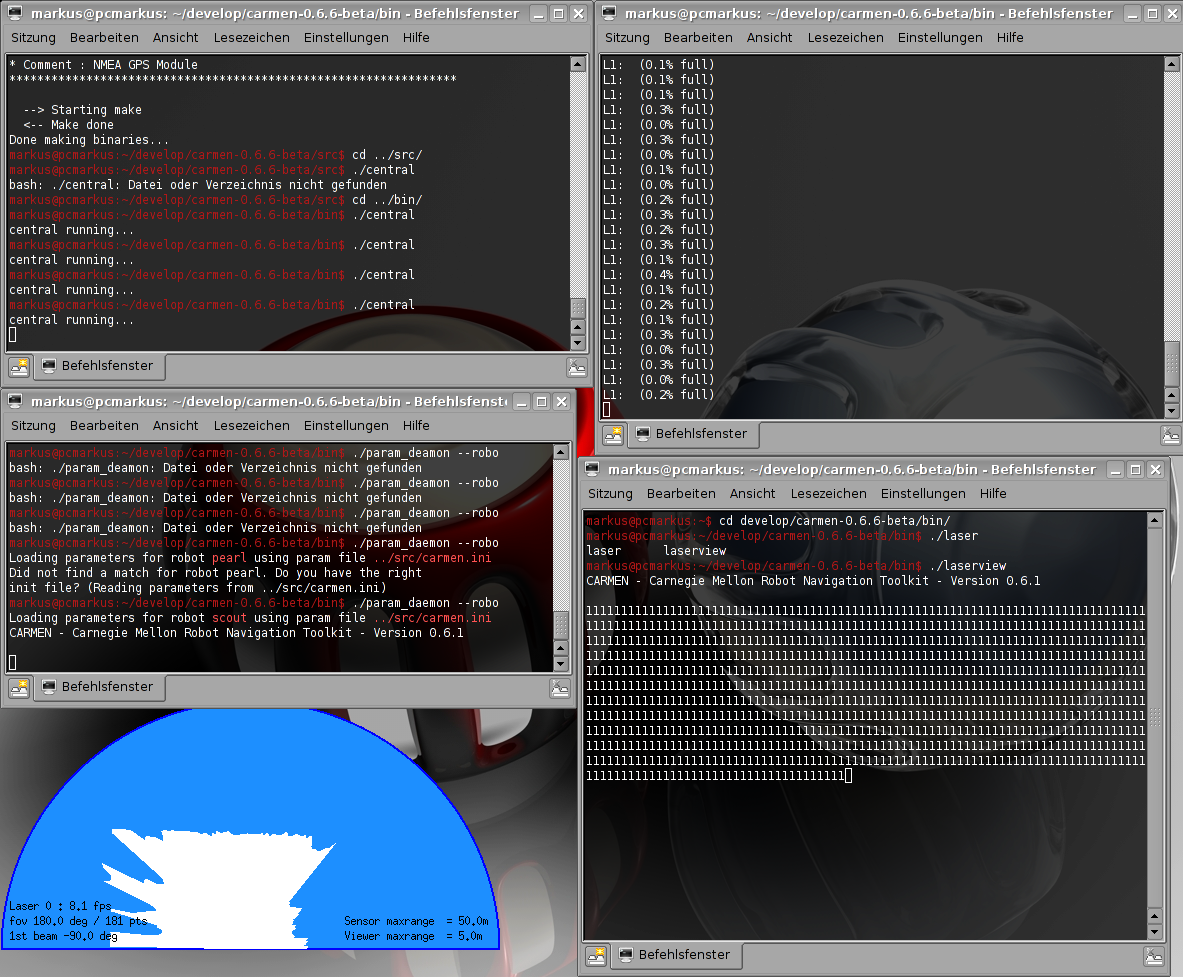
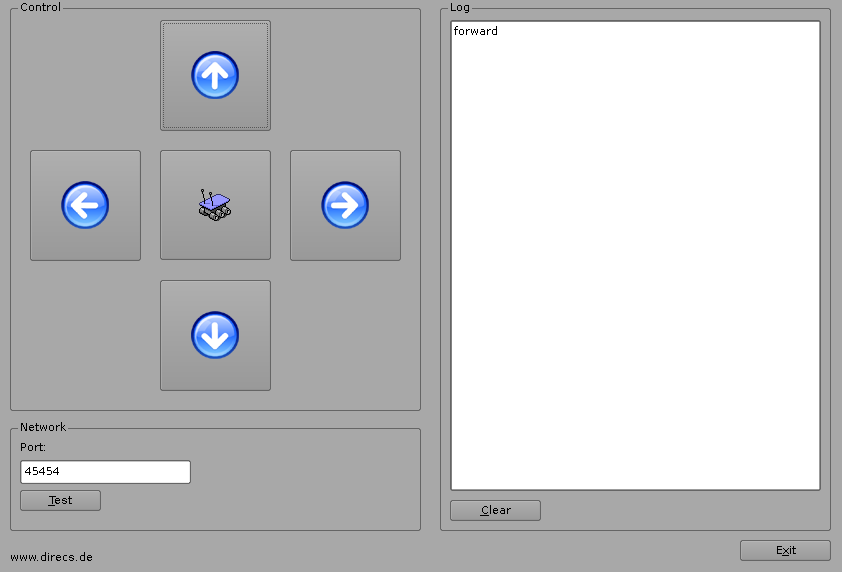
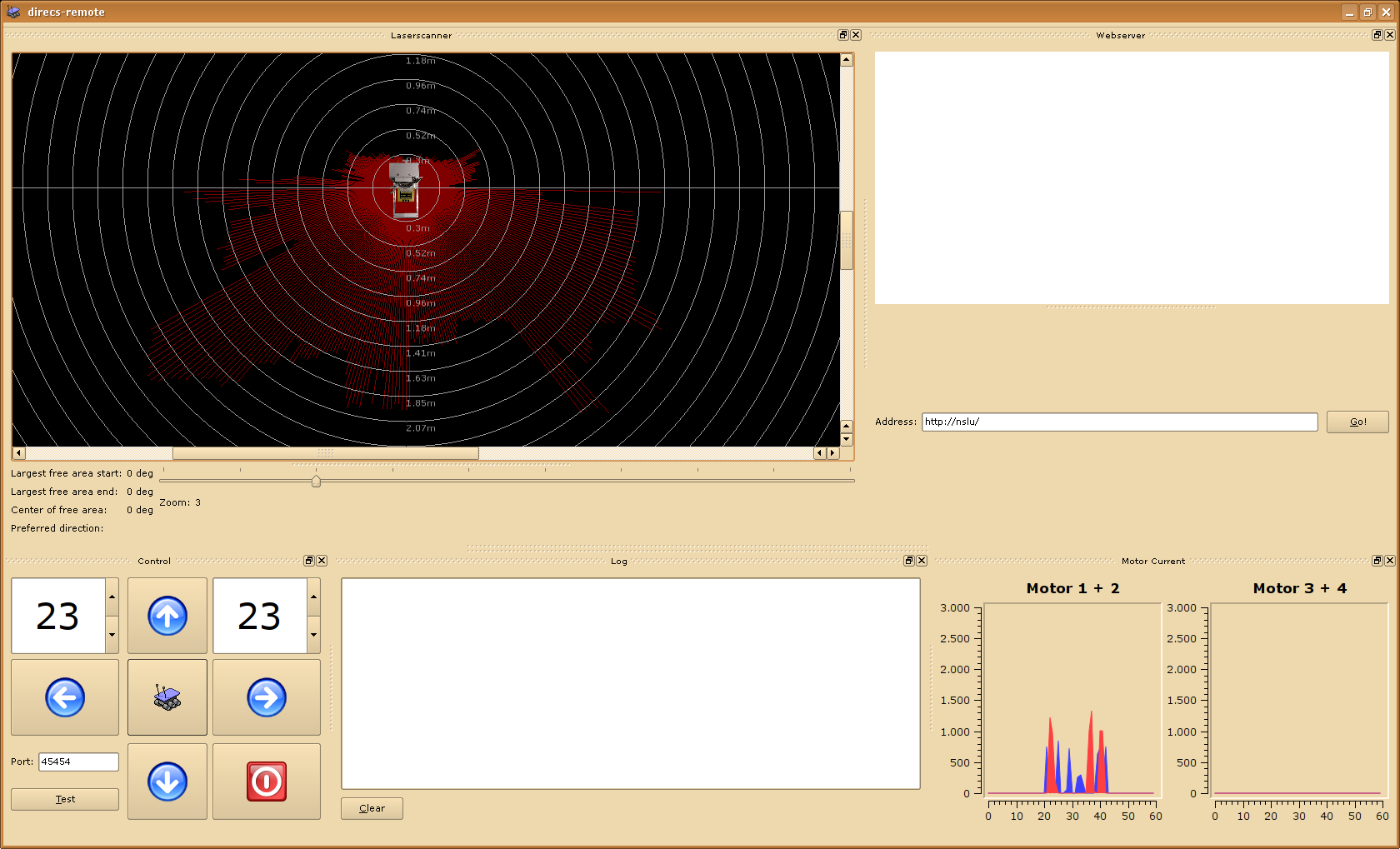 Das DIRECS remote Programm zeigt nun über das Netzwerk(!) die Daten der Laserscanner und die Stromverbrauchsdaten der Motoren an. Das DIRECS remote Programm zeigt nun über das Netzwerk(!) die Daten der Laserscanner und die Stromverbrauchsdaten der Motoren an. |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |