Nach vielen vielen Code-Updates und dem kompletten Rewrite des sogenannten obstacleCheckThreads, war es endlich an der Zeit, den Roboter drauf los zu lassen. Hello world… ;-)
Es gab zwar beim Testen ein- oder zweimal Abstürze, beim Betrieb der Software unterm Mac (Roboter war „aufgebockt“, Fahrpogramm gestartet), diese konnten aber bislang nicht reproduziert werden.
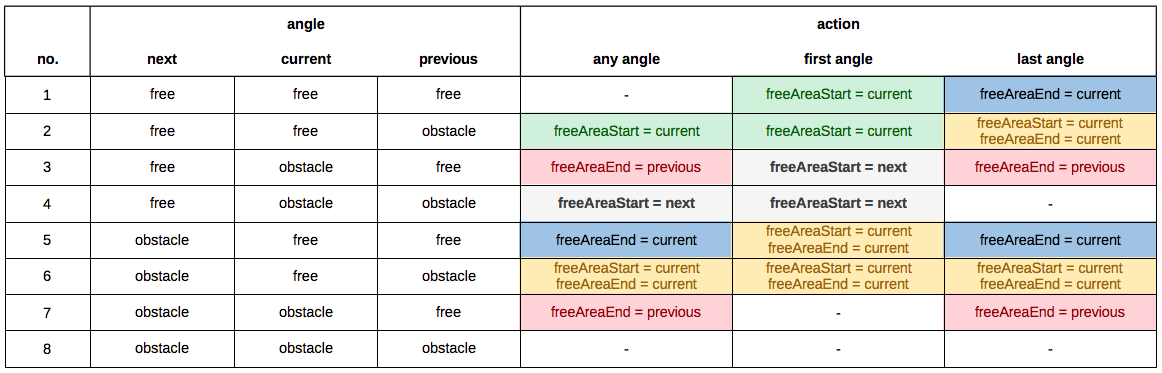
Um es gleich vorweg zu nehmen: Alles funktioniert eigentlich einwandfrei. Jedoch „erkennt“ der Roboter die Hindernisse derzeit noch zu spät. Obwohl bereits die langsamste Fahrgeschwindigkeit gewählt wurde und auch das Entfernen des sleep commands aus laserThread und obstacleCheckThread keine Beschleunigung brachte, reichte dies alles nicht aus, den Roboter dazu zu bringen, schnell genug auszuweichen.
Im Moment habe ich ehrlich gesagt keine Idee, woran es liegen könnte… Genug der Worte, hier die einzelnen Videos.
Hier sieht man, wie der Roboter – wie im späteren Fahrbetrieb – mit dem onBoard-PC läuft, jedoch noch „aufgebockt“:
Beim zweiten Video sieht man, wie der Roboter „richtig“ fährt und auch dem ersten Hindernis brav ausweicht, aber dann unmotiviert (leider aus dem Bild) bei einem Hindernis festhängt, dann aber wendet um anschließend mutig Richtung Werkbank zu fahren. Vor lauter Schreck bleibt er er jedoch vor dem Hindernis stehen und aktiviert den Zustand „alles voller Hindernisse“ (Blitzlicht an, alles stoppen):
Nun wurde kurzerhand ein Laptop auf den Bot „befestigt“ (Festplatte zuvor vom Roboter auf den Laptop geclont) um zu Testen, ob der onBoard-PC vielleicht zu langsam ist. Sieht aber nicht danach aus. Auch das klappt nicht wie gewünscht:
Da er beim vorigen Film drohte, erneut die Staffelei umzureißen (auch wegen der provisorisch befestigten, aber herausragenden Aluschiene), hier noch ein letzter „Outtake“. Ich nenne ihn mal „mutiges Hindernis-Anfahren, um dann doch zu stoppen“: