Inspiriert durch dieses Kunstprojekt, dachte ich: „Ein Gewitter imWohnzimmer? Das kann ich auch bauen!“.
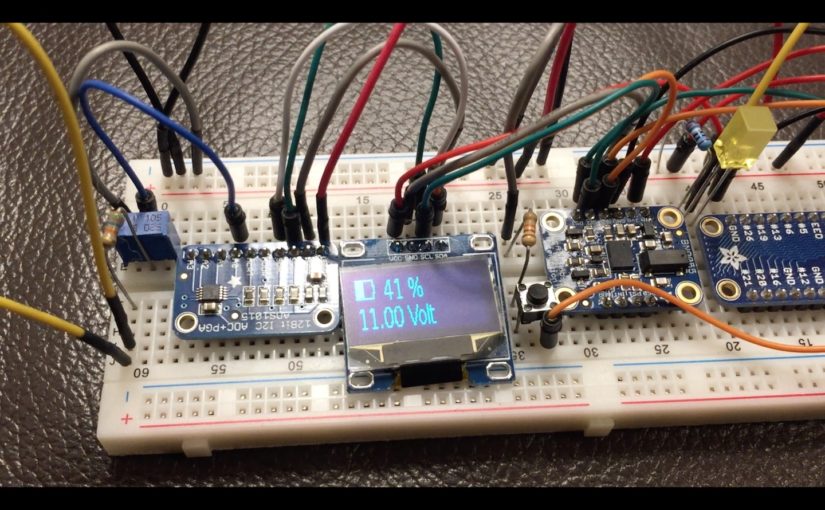
Das war bereits 2019 – hier nun endlich die Fotos, die den Zusammenbau und die benötigten Einzelteile dokumentieren.
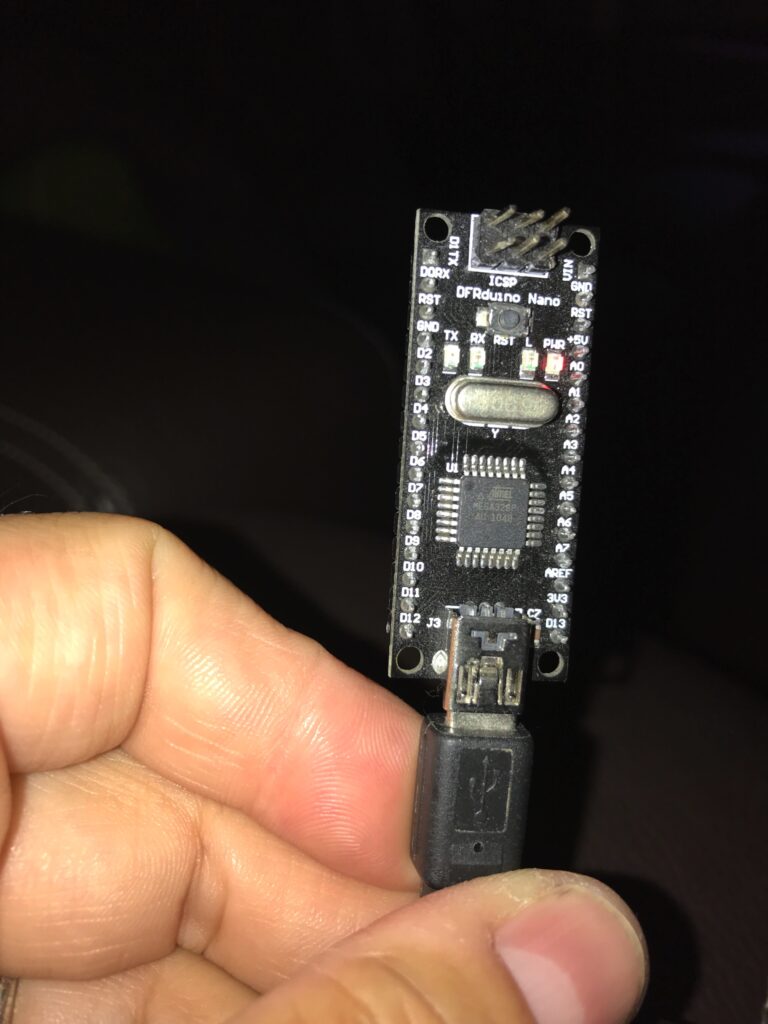
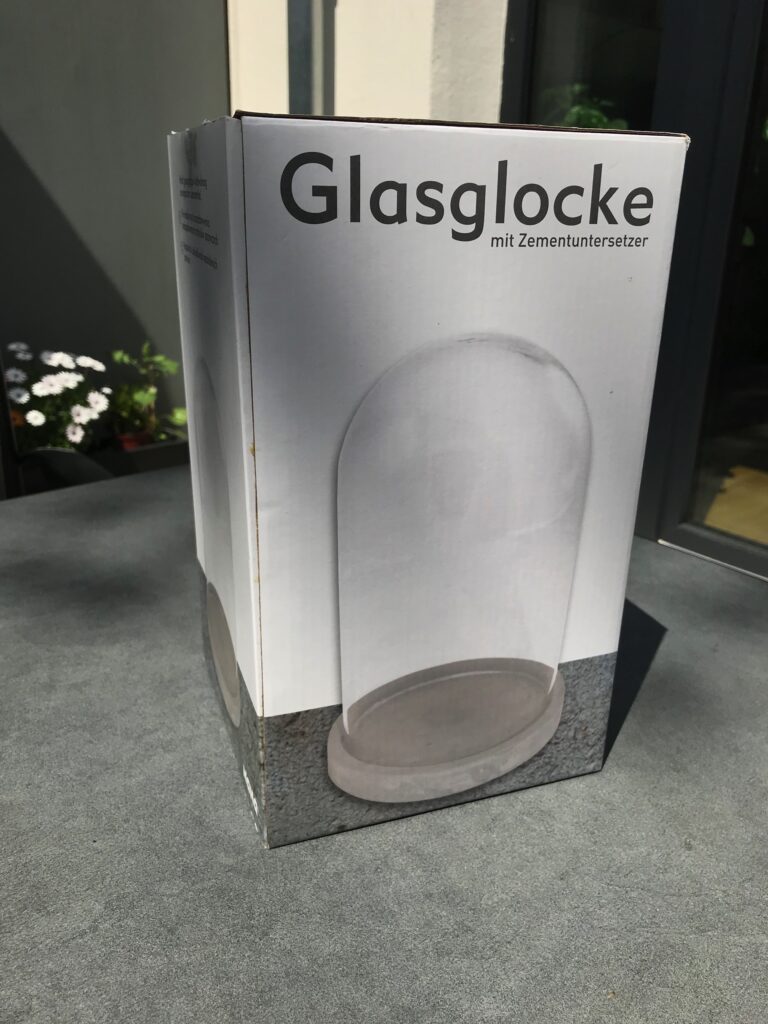
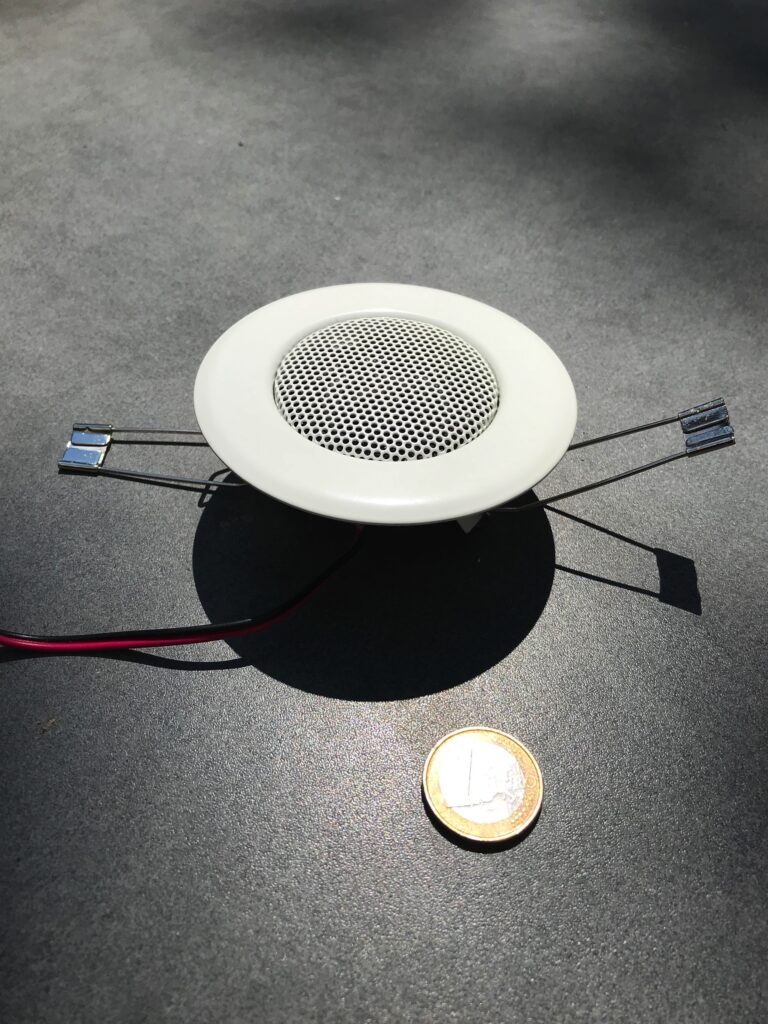



Weiter ging es mit dem Zusammenbau…
Gewitterlampe weiterlesen