Es geht voran mit dem STM32F4-Discovery Board!
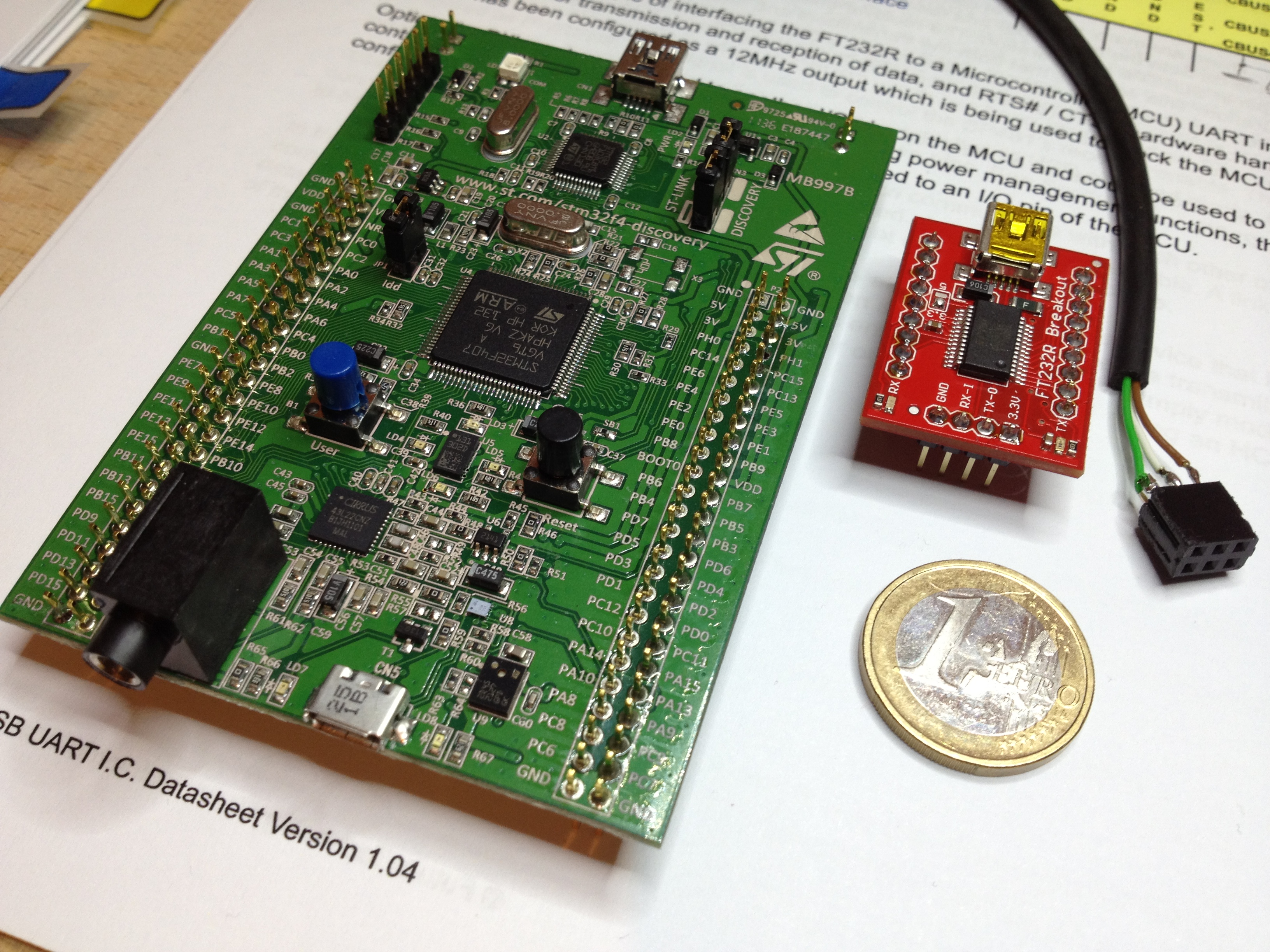
Um es vorweg zu nehmen: Die folgende serielle Übertragung geschieht nicht über die bereits auf dem STM-Board verbauten USB-Ports. Nach Studium diverser Threads im Internet erwarb ich ein neues IC, welches in der Lage ist, den seriellen Port des ARM-Prozessors (USART) in einen USB-Port zu wandeln.
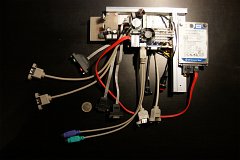
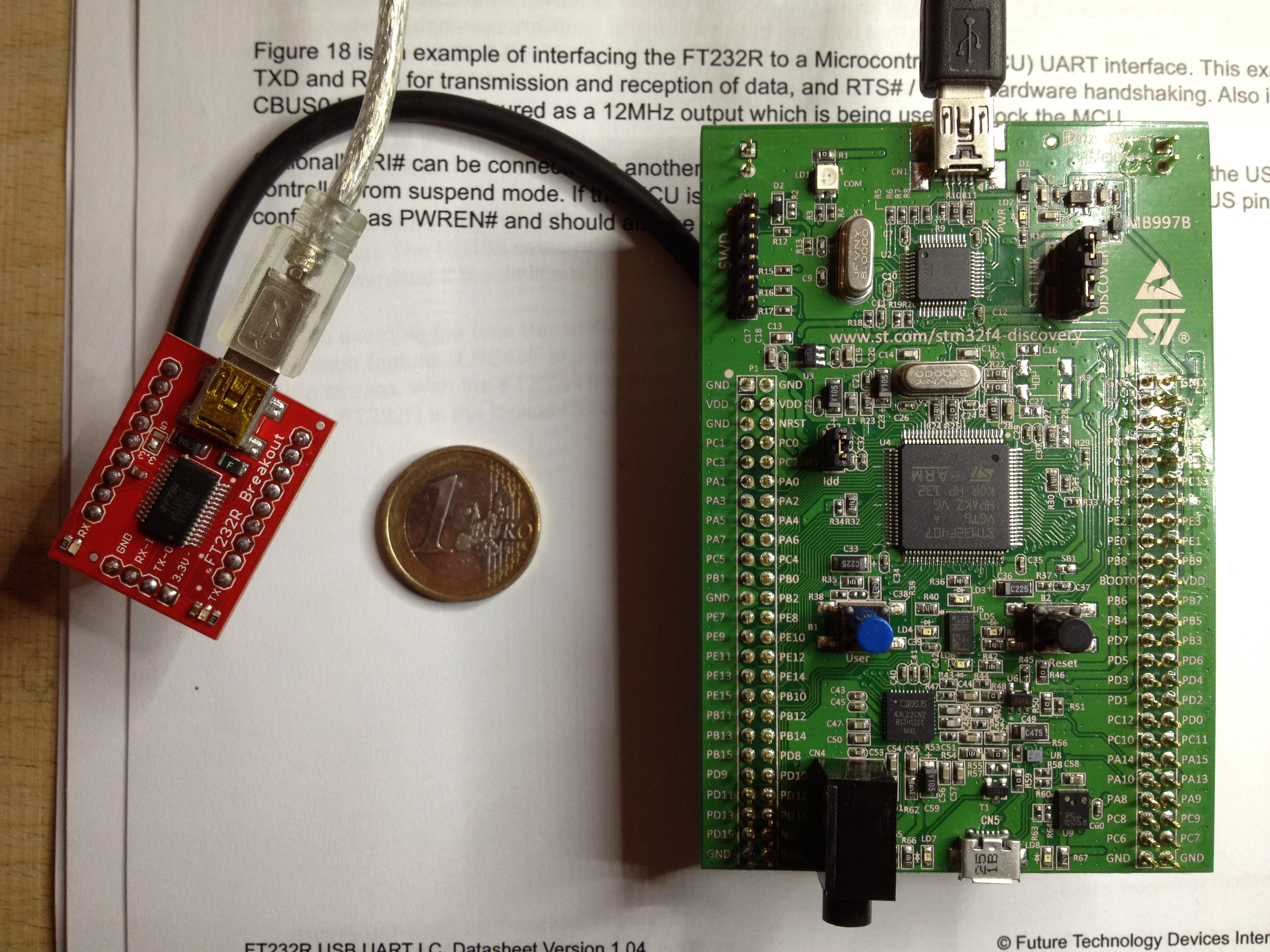
Das Ganze ist auf einem sogenannten Breakout-Board von Sparkfun gleich praktisch fertig verlötet, man muss nur noch Stiftleisten hinzufügen. Zum Einsatz kommt hier der Baustein FTDI232R, der keine weiteren Bauteile mehr benötigt und auch gleich mit den 3,3 Volt Logiklevel des STM-Boards klar kommt. Entgegen dem Datenblatt von FTDI müssen bei der Verbindung zwischen dem Breakoutboard drei Leitungen verlötet werden: TX mit RX und RX mit TX und natürlich die gemeinsame Masse, GND. Wer will könnte auch noch gleich zwei Hardware flow control Leitungen mit anschließen – beide Boards unterstützen dieses. So sieht die Testverbindung dann mit den Steckern aus:
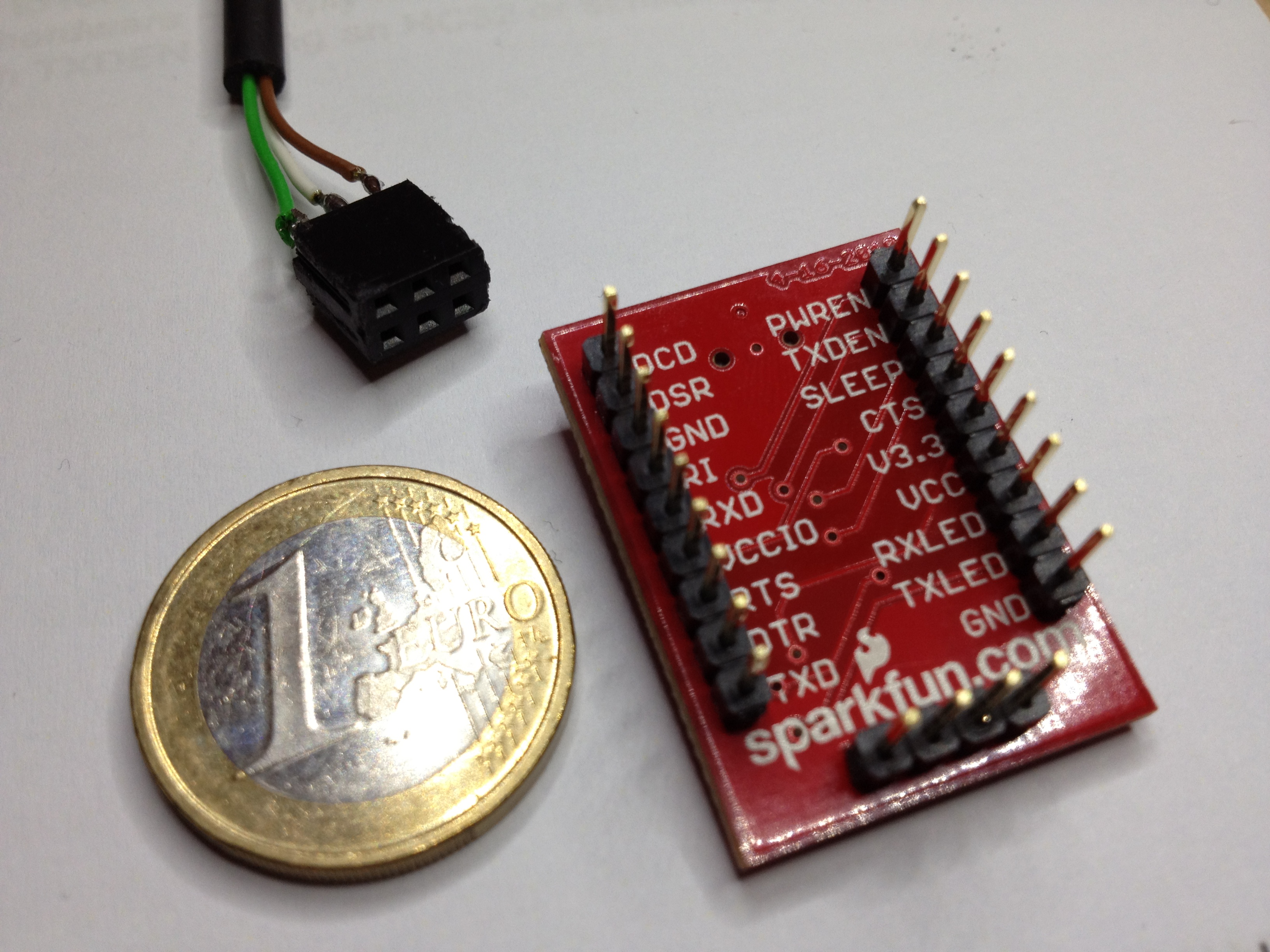
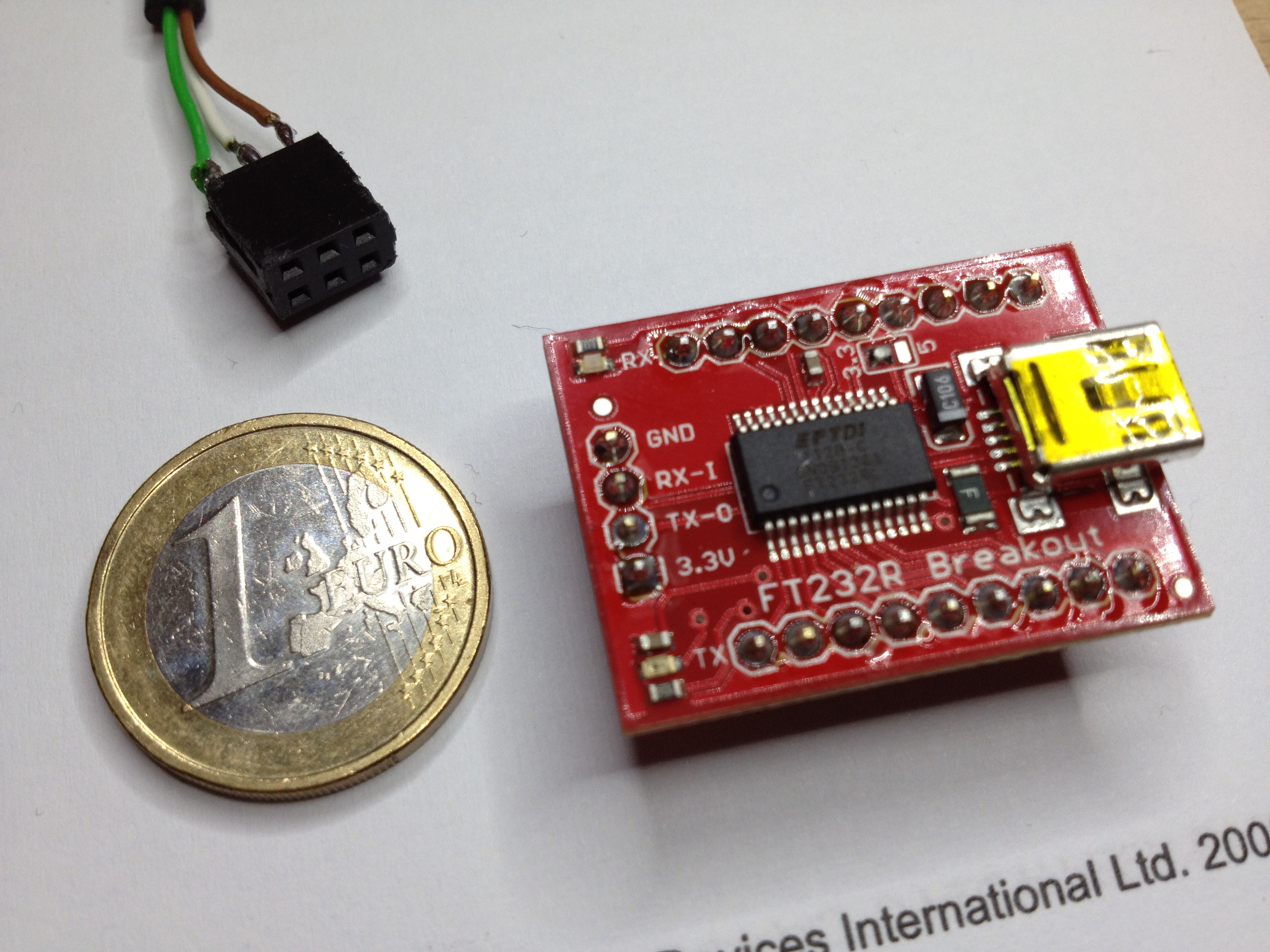
Hier das Breakout-Board mit dem FTDI-Chip und der USB-Buchse (rechts, mit oranger Schutzfolie) noch einmal im Detail:
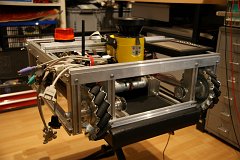
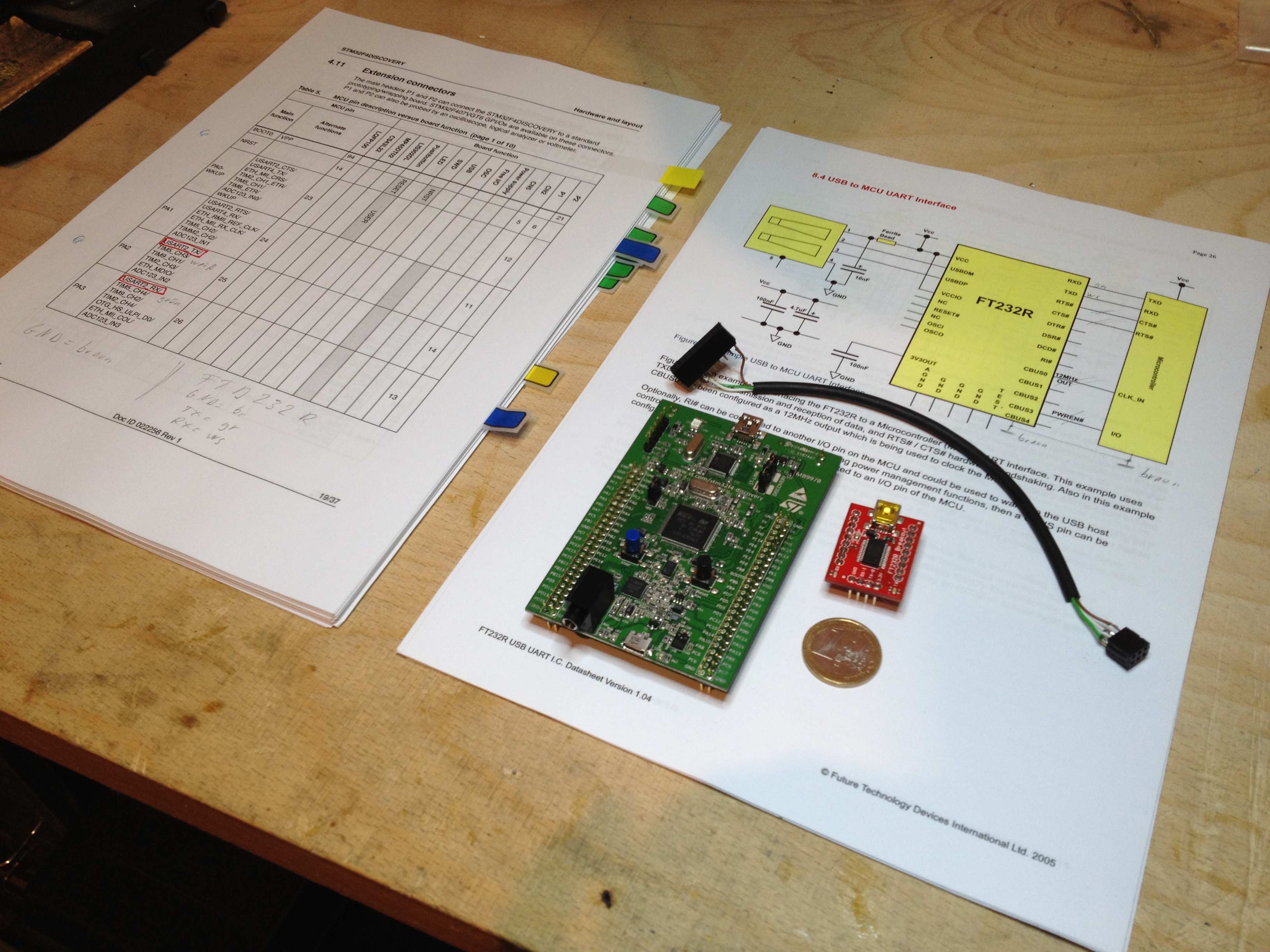
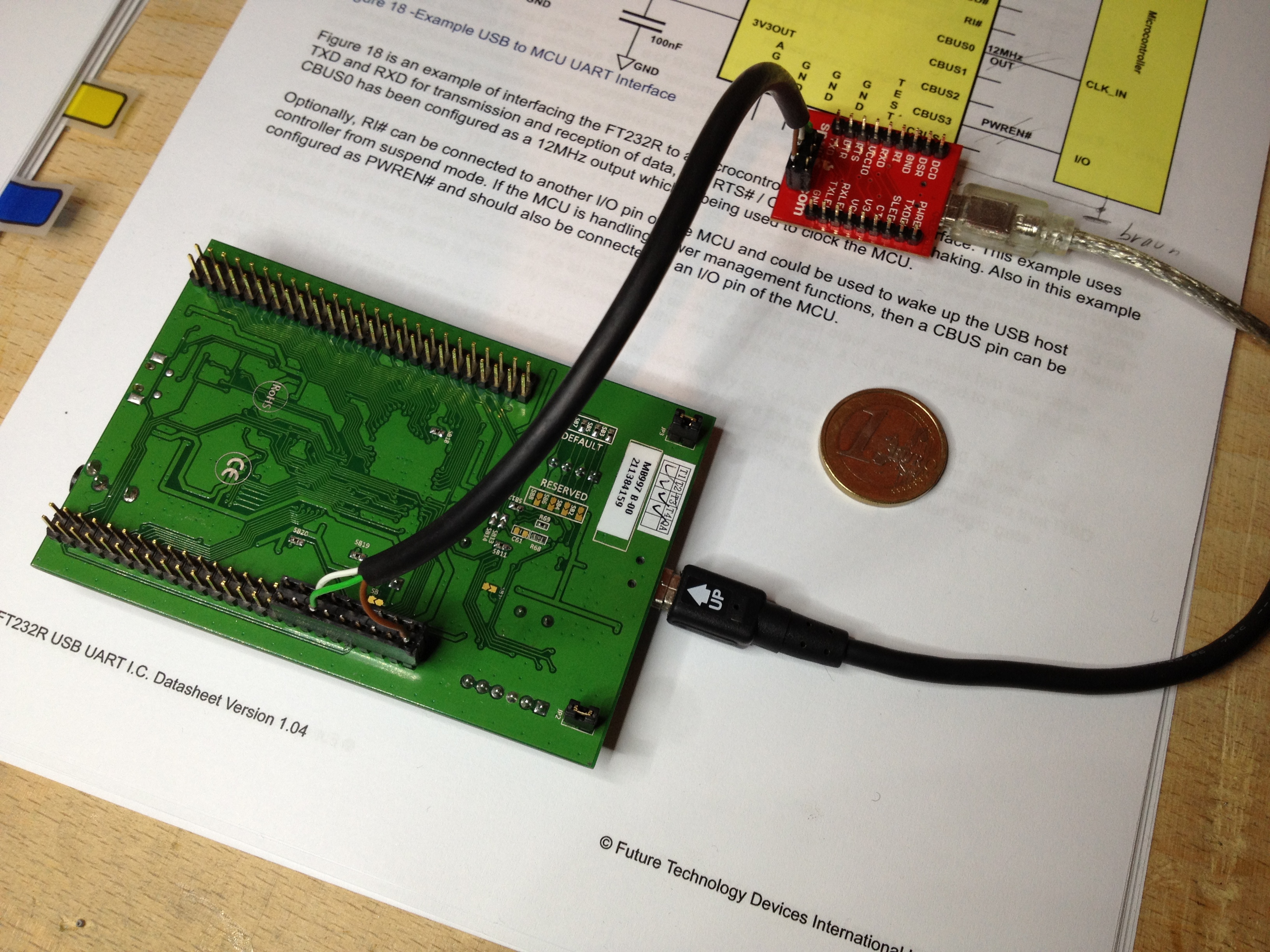
Und so wird das Ganze dann zum Testen angeschlossen: Das schwarze USB-Kabel, welches zum STM-Board führt, dient hier nur zum flashen des selbigen und zur Stromversorgung. Das transparente USB-Kabel, welches zum FTDI-Board geht, ist das Kabel, welches dann zum PC oder Mac geht. Wird dieses dann angeschlossen, erscheint z.B. unter Linux und Mac OS X ein Device namens /dev/tty.xxxxx bzw. /dev/ttyUSBx. Beim Mac enthält „xxxxx“ gleich eine einmalige Seriennummer. Bestellt hattee ich das Board übrigens bei Watterott (ca. 14 EUR).
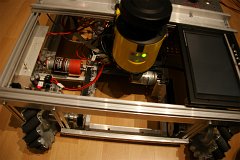
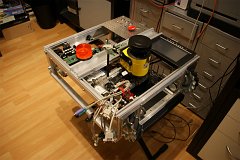
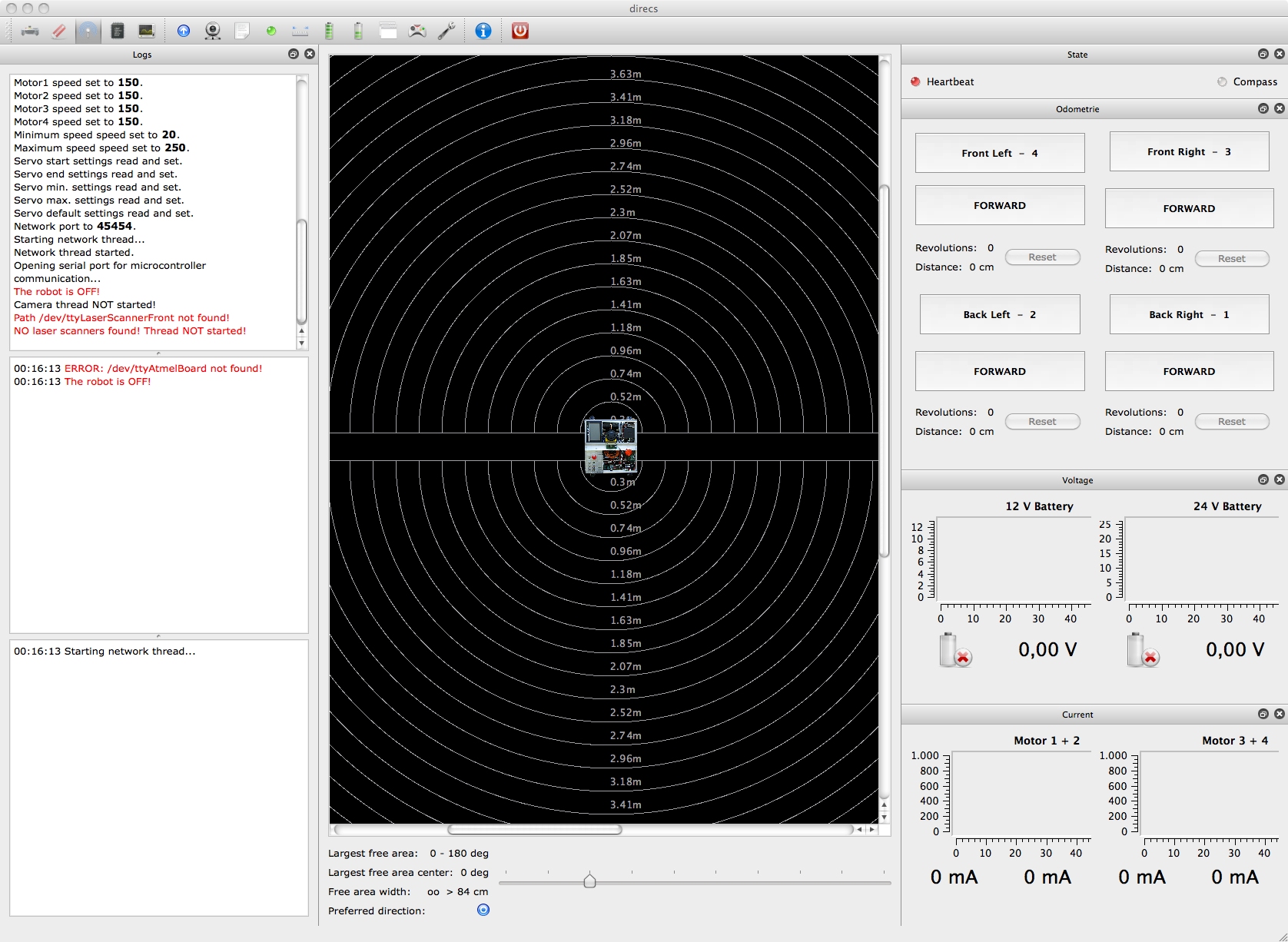
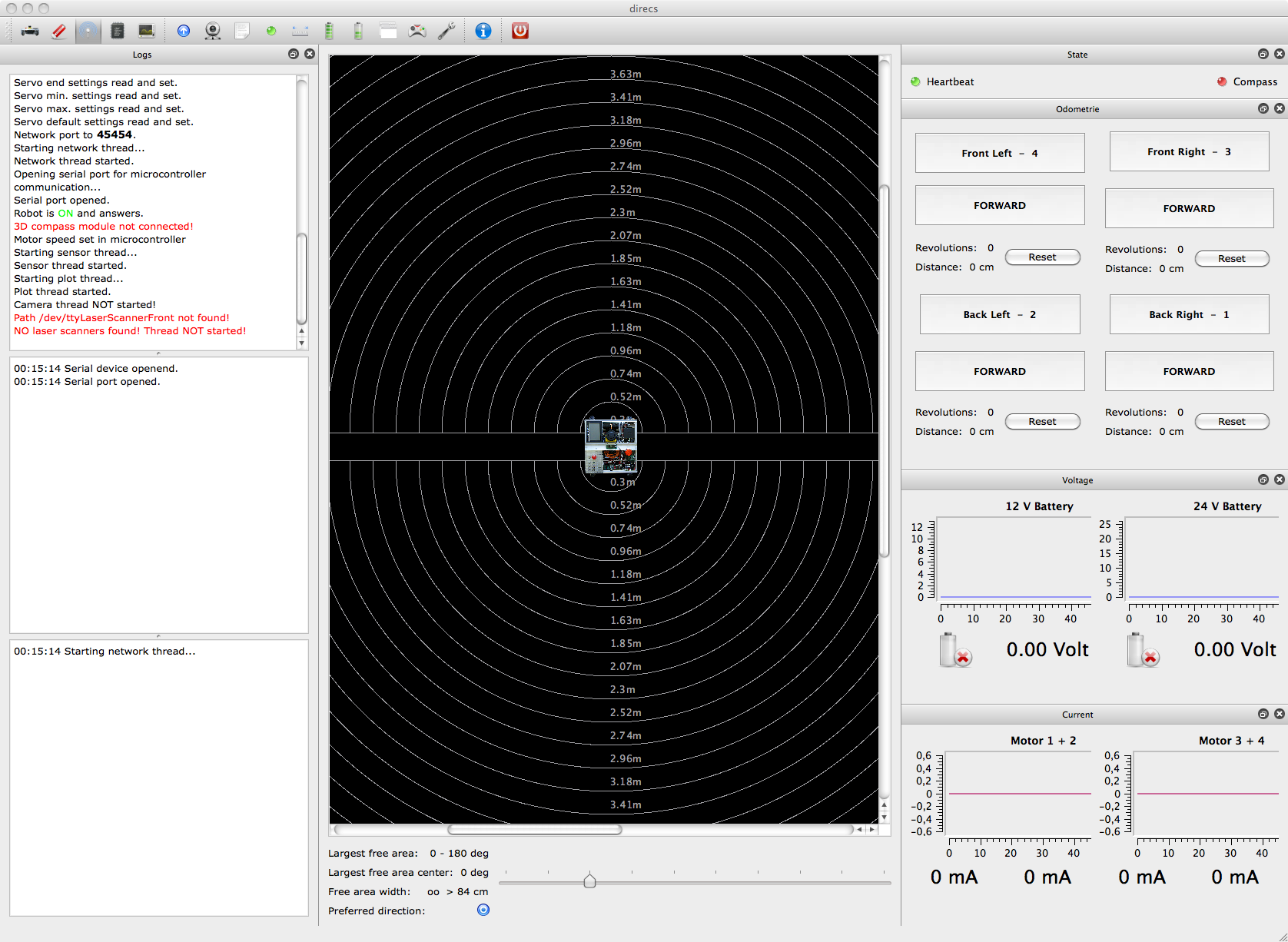
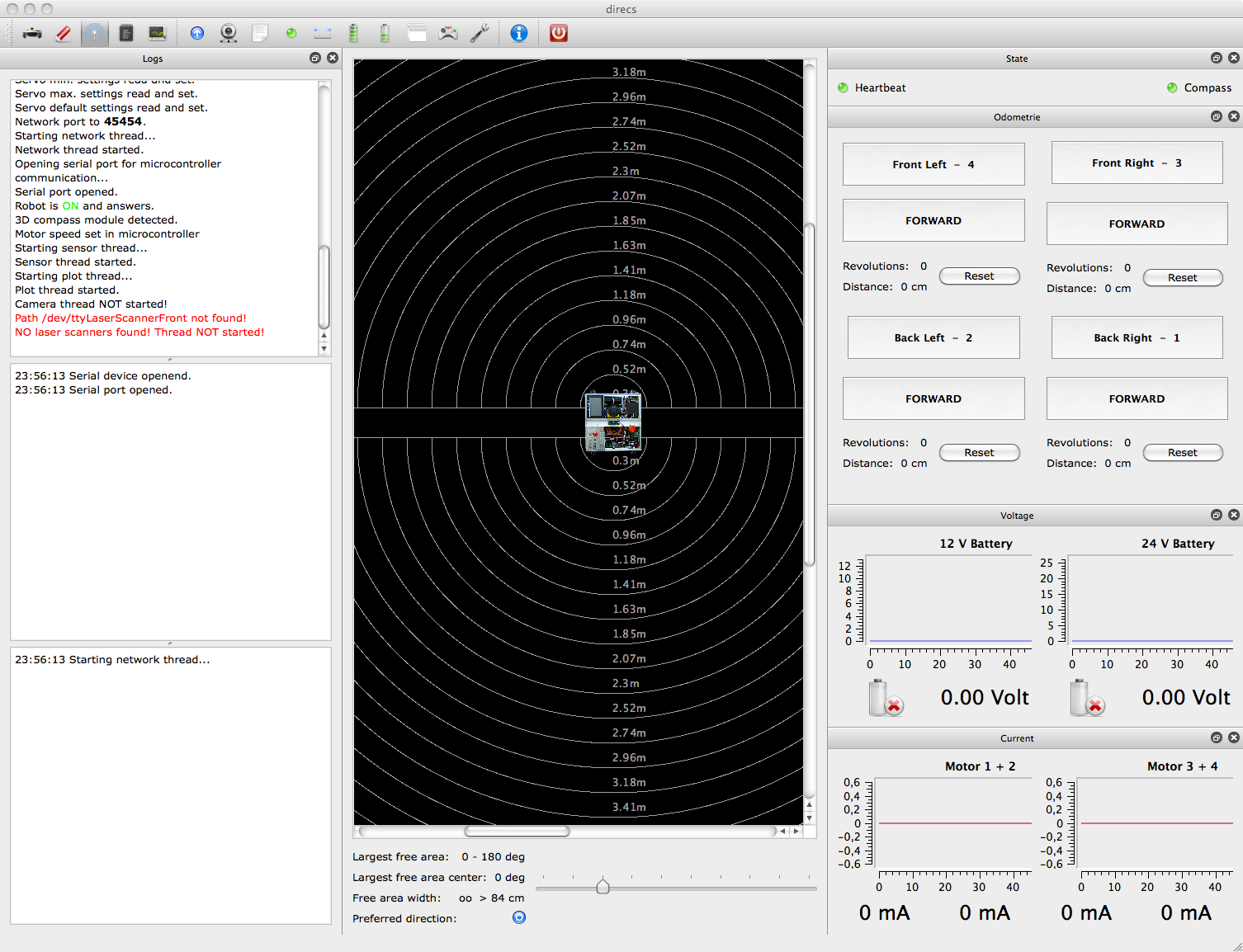
Hier sind beide Boards dann mal zum Testen am „PC“ des Roboters angeschlossen:
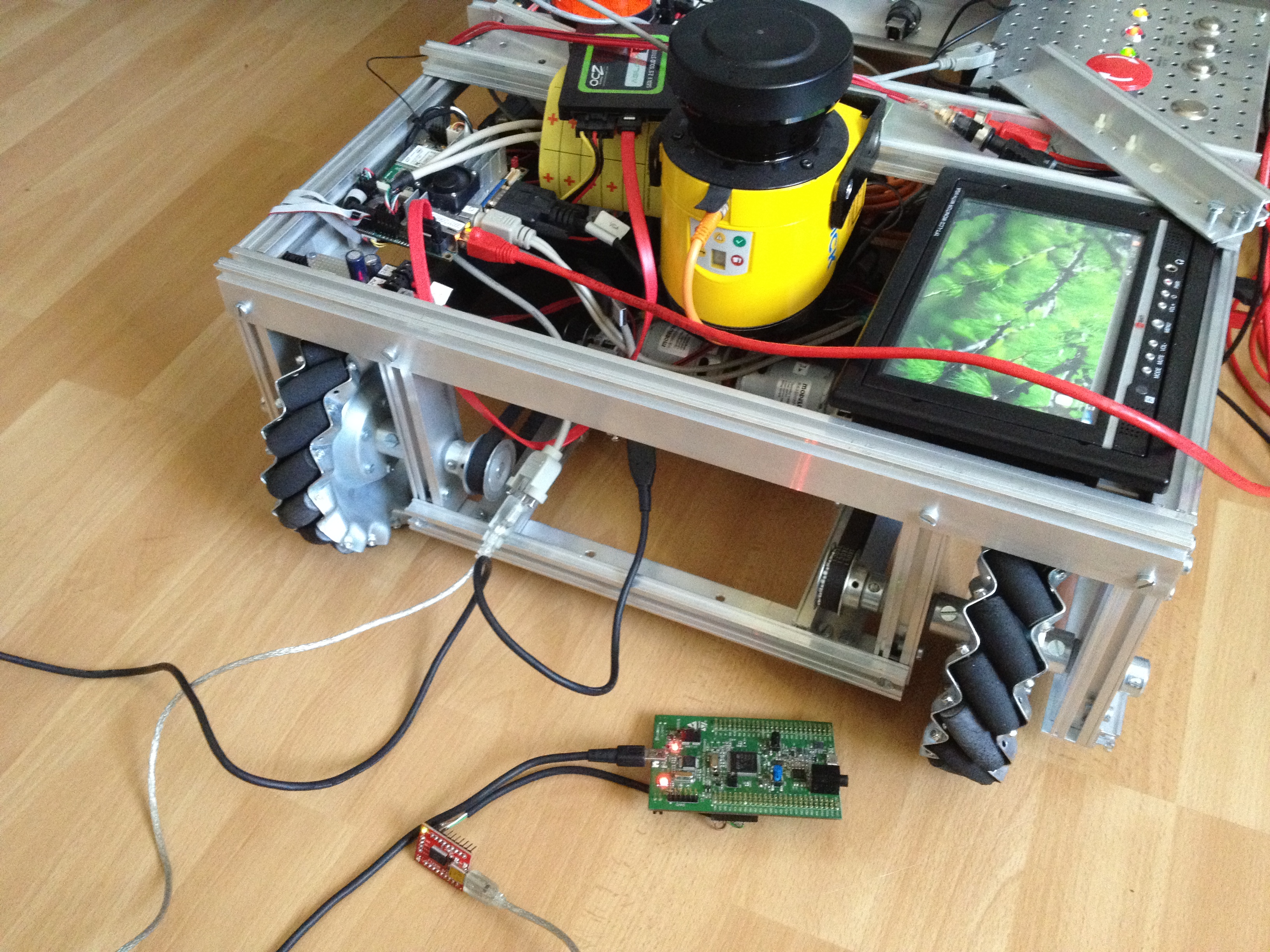

Später sollen dann die Daten vom PC des Roboters zum STM-Board (über den FTDI-Chip) und zurück fließen. Diese Aufgabe übernimmt derzeitnoch ein Atmel-Board mit einem Atmega 2560. Tipp: Auf dem STM-Board gibt es diverse USART, wovon aber einige bereits z.B. durch den vorhandenen USB-Port belegt sind! Ich habe mich daher für den noch freien USART2 entschieden.