Da durch die beiden Laserscanner nun eine gewisse Rundumsicht erreicht wurde, wurde die verspiegelte Glühlampe mitsamt der Kamera oben abgebaut, um sie später mit einer Art Pan-Tilt-Halterung zu versehen. Somit sollte die Kamera also mit Motoren hoch, runter und nach links und rechts (schwenkend) bewegt werden können. Das war das Ziel. Hier die Fotos mit dem unerwartet langen Weg da hin:

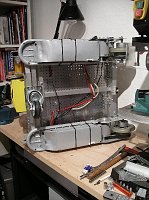
Nun wurden ein paar der beliebten Profile gesägt und auf/an Schrittmotoren montiert. Diese haben den Vorteil der exakten Positionierung (der später daran befestigten Kamera). Sehr schön zu sehen, die angeschliffenen Motorachsen, um sie innerhalb des Profils fest "einklemmen" zu können:




Hier dann im Aluprofil fixiert:


So sehen die guten Stücke übrigens von innen aus. Beim Befestigen brach nämlich leider eine der 3mm-Schrauben ab, weshalb der Motor auseinander genommen werden musste umd das Gewinde frei zu bohren:

Und weiter ging es mit der Montage der Kamera:


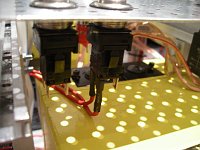
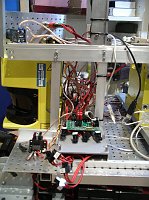
Damit die späteren Kabel sich nicht endlos um die Kamera wickeln, waren definierte Endpunkte erforderlich. Diese wurde mittels robuster Microschalter festgelegt. Sowohl mechanisch, also auch per späterer elektronischer Auswertung der Schaltersignale:

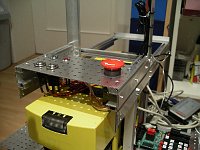
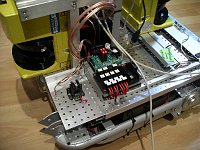
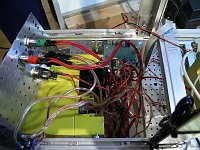
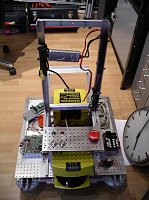
Nun das ganze auf dem Roboter montiert:






Hier sehr schön im Detail zu sehen, die Mikroschalter:


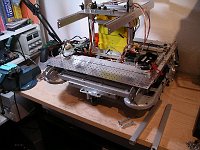
IIm Gesamtergebnis dann so: