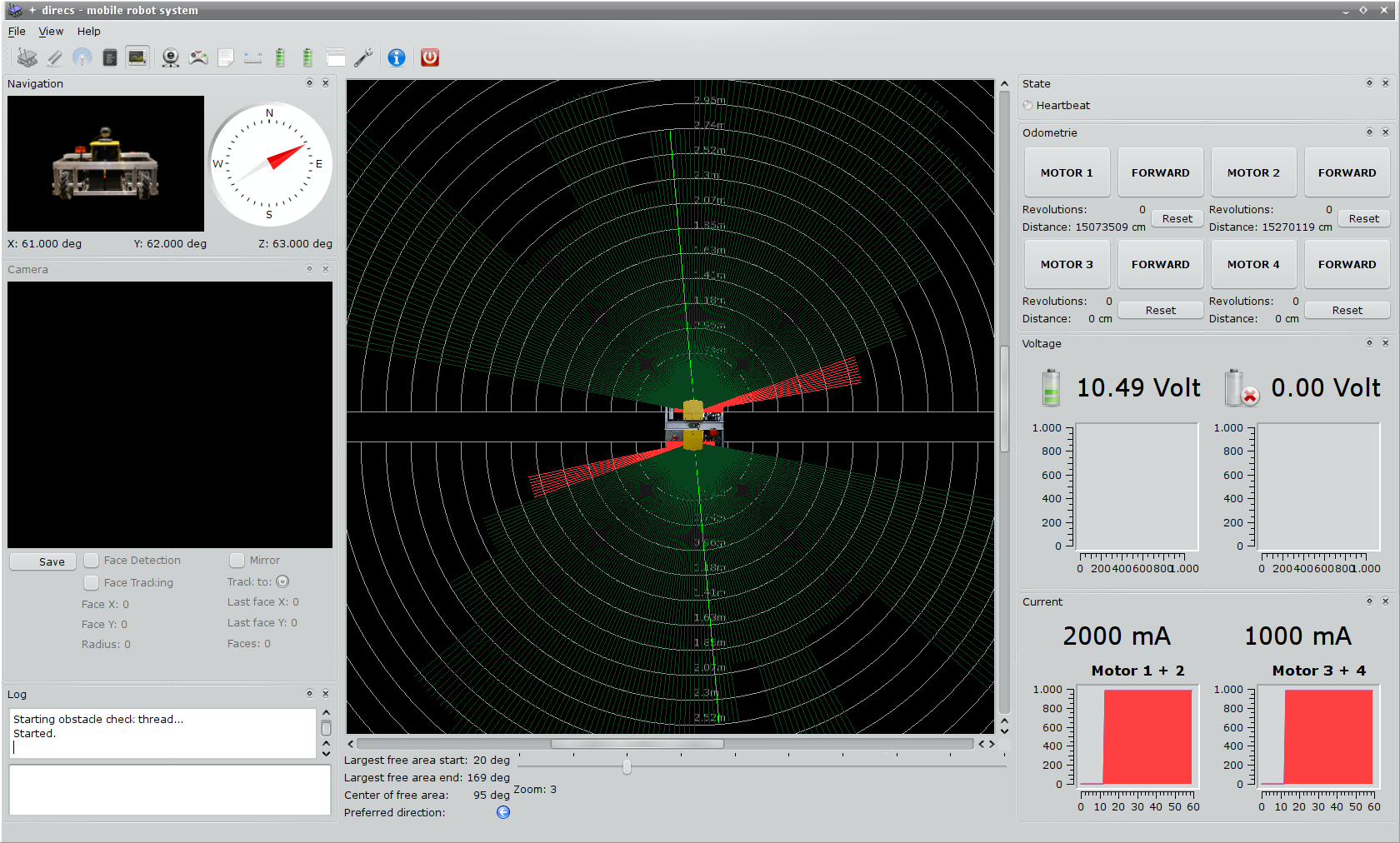
Nach dem Tod des alten und ersten Atmel-Boards und 60 EUR später, von robotikhardware.de sollte nun einfach das neu gelieferte Board geflasht und ein den Roboter eingesetzt werden…
Interessanterweise lies sich das Board zwar einwandfrei flashen und wurde auch am USB-Port sauber erkannt (auch das mitgelieferte Testprogramm lief beim ersten Einschalten einwandfrei), aber leider lief danach scheinbar gar nichts mehr.
Konkret lief das flashen zwar einwandfrei durch (einschließlich vorigem Löschen und anschließendem verify), das Atmel-Board bzw. die geflashte Firmware "lief" danach aber nie. Selbst ein Testprogramm welches nur ein Bit setzte um die onBoard-LED zu aktivieren lief nicht.
Um das Ganze nicht noch spannender zu machen: Ursache war ein vom Lieferanten falsch gesetztes Fuse-Bit! Nur unter größter Unterstützung eines Forum-Mitgliedes des Forums RoboterNetz.de, wurde diese Ursache gefunden (Danke an Sven Arnold).
Entgegen der Anleitung auf der mitgelieferten CD war das betreffende Fuse-Bit M nicht wie folgt gesetzt:
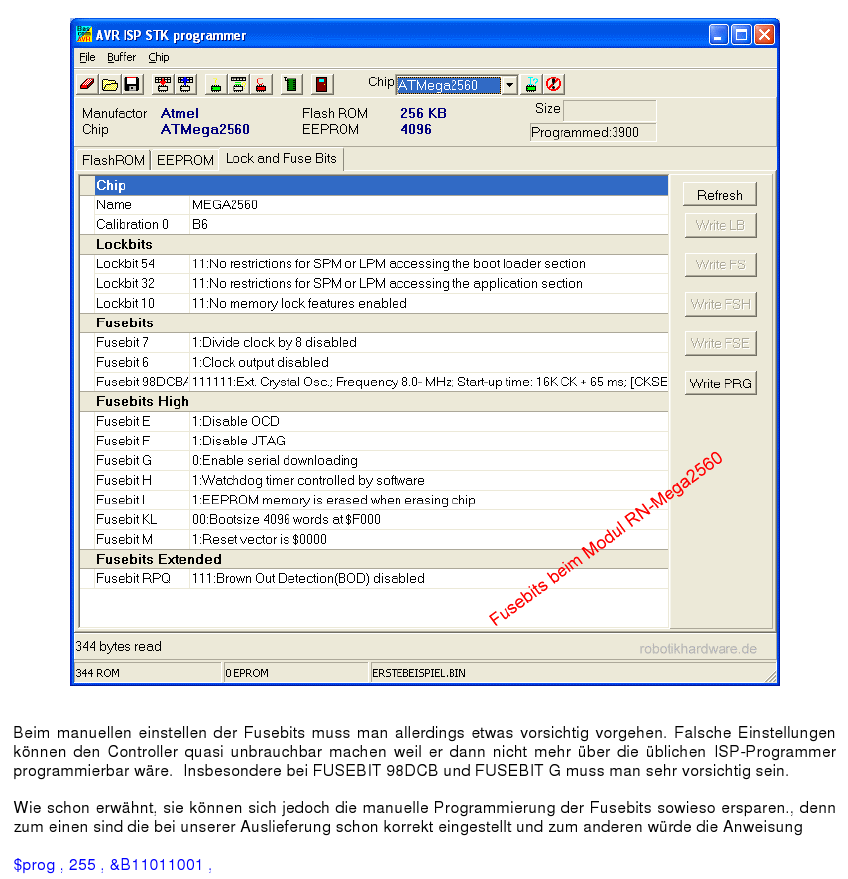
Quelle: http://www.robotikhardware.de/download/rnmega2560.pdf
Statt dessen war das Bit auf "Bootloader" gesetzt. Dieser stand jedoch gemäß beiliegender CD gar nicht zur Verfügung, sondern war in Planung. [Update: Mittlweile verfügbar] Damit war klar, dass der Atmel per Bootloader starten wollte und nicht sofort das geflashte Programm startete. Kleine Ursache, große Wirkung. Am Ende der zwei Tage leuchte dann auch wieder die LED und das alte, unveränderte Atmel-Progamm lief natürlich auch wieder anstandslos:

:-)