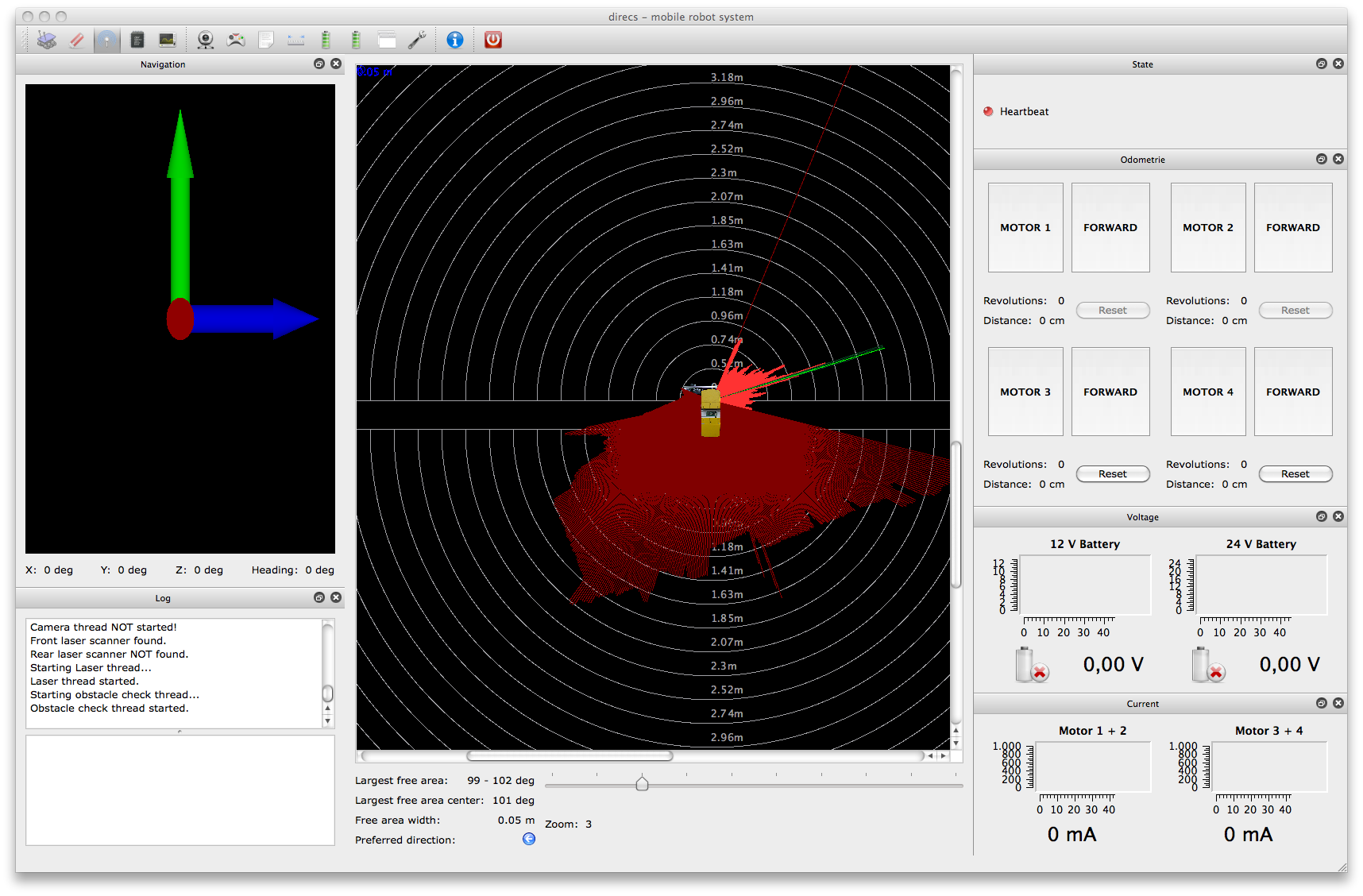
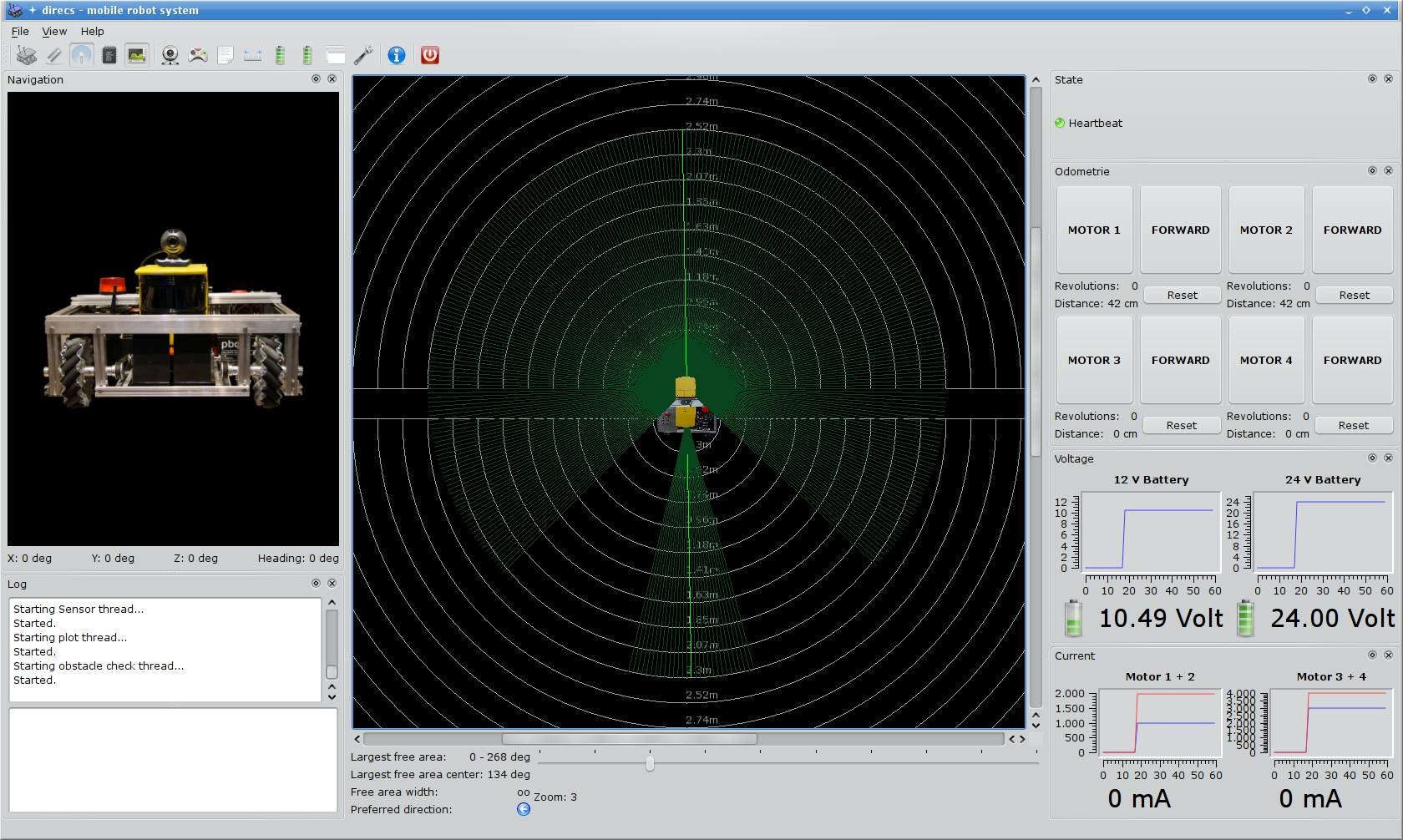
Das Update des Programmcodes ist so gut wie abgeschlossen. Hier die erste Ansicht, die natürlich fast wie vorher aussieht, nun eben mit Daten vom SICK S300 Laserscanner:
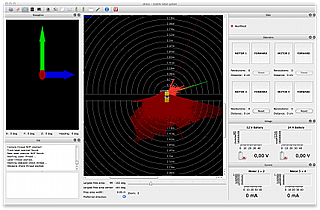
Es sieht aber nur fast genau so aus, wie vorher: Denn: Der S300 hat eine Auflösung von 0,5 Grad bei 270 Grad "field of view". Darum werden im Screenshot auch 540 statt 270 Laserlinien angezeigt. Daher war auch das Anpassen des Sourcecodes aufwändiger, da an vielen Stellen die Auflösung des Scanners zusätzlich mit integriert werden musste (LaserThread, ObstacleCheckThread, GUI, …).
Ein paar Ausreißer gibt es noch: Wie man sieht ist der Wert für 0 Grad noch falsch (längste rote Linie rechts oben im Bild) und die Flags werden nicht vollständig für alle Linien gesetzt (z.B: grün für den größten freien Bereich). Um einen Eindruck über die Anpassungen zu bekommen, hier eine git Übersicht:
direcs/bin/direcs.ini | 10 +-
direcs/direcs.pro.user | 18 +-
direcs/direcs.qrc | 95 ++–
direcs/direcs.tag | 412 ++++++——-
direcs/images/kdevelopbanner-small.gif | Bin 2930 -> 0 bytes
direcs/src/aboutDialog.ui | 52 +-
direcs/src/camThread.cpp | 8 +-
direcs/src/camThread.h | 10 +-
direcs/src/consoleGui.cpp | 4 +-
direcs/src/consoleGui.h | 4 +-
direcs/src/direcs.cpp | 100 ++–
direcs/src/direcs.h | 2 +
direcs/src/direcsSerial.cpp | 133 ++++-
direcs/src/direcsSerial.h | 37 +-
direcs/src/gui.cpp | 42 +-
direcs/src/gui.h | 21 +-
direcs/src/inifile.cpp | 17 +-
direcs/src/inifile.h | 14 +-
direcs/src/interfaceAvr.cpp | 48 +–
direcs/src/interfaceAvr.h | 16 +-
direcs/src/laser.h | 4 +
direcs/src/laserSickS300.cpp | 1068 ++++++++++++——————–
direcs/src/laserSickS300.h | 186 ++—-
direcs/src/laserThread.cpp | 726 ++++++++++++++++++—-
direcs/src/laserThread.h | 64 ++-
direcs/src/obstacleCheckThread.cpp | 16 +-
direcs/src/obstacleCheckThread.h | 2 +-
direcs/src/speakThread.cpp | 2 +-
direcs/src/speakThread.h | 2 +-
direcs/src/src.pro | 53 +–
30 files changed, 1717 insertions(+), 1449 deletions(-)
delete mode 100644 direcs/images/kdevelopbanner-small.gif