Mein Roboter
An dieser Stelle möchte ich zeigen, welche Komponenten aktuell bei meinem Roboter minibot verbaut sind und was diese so kosten können.
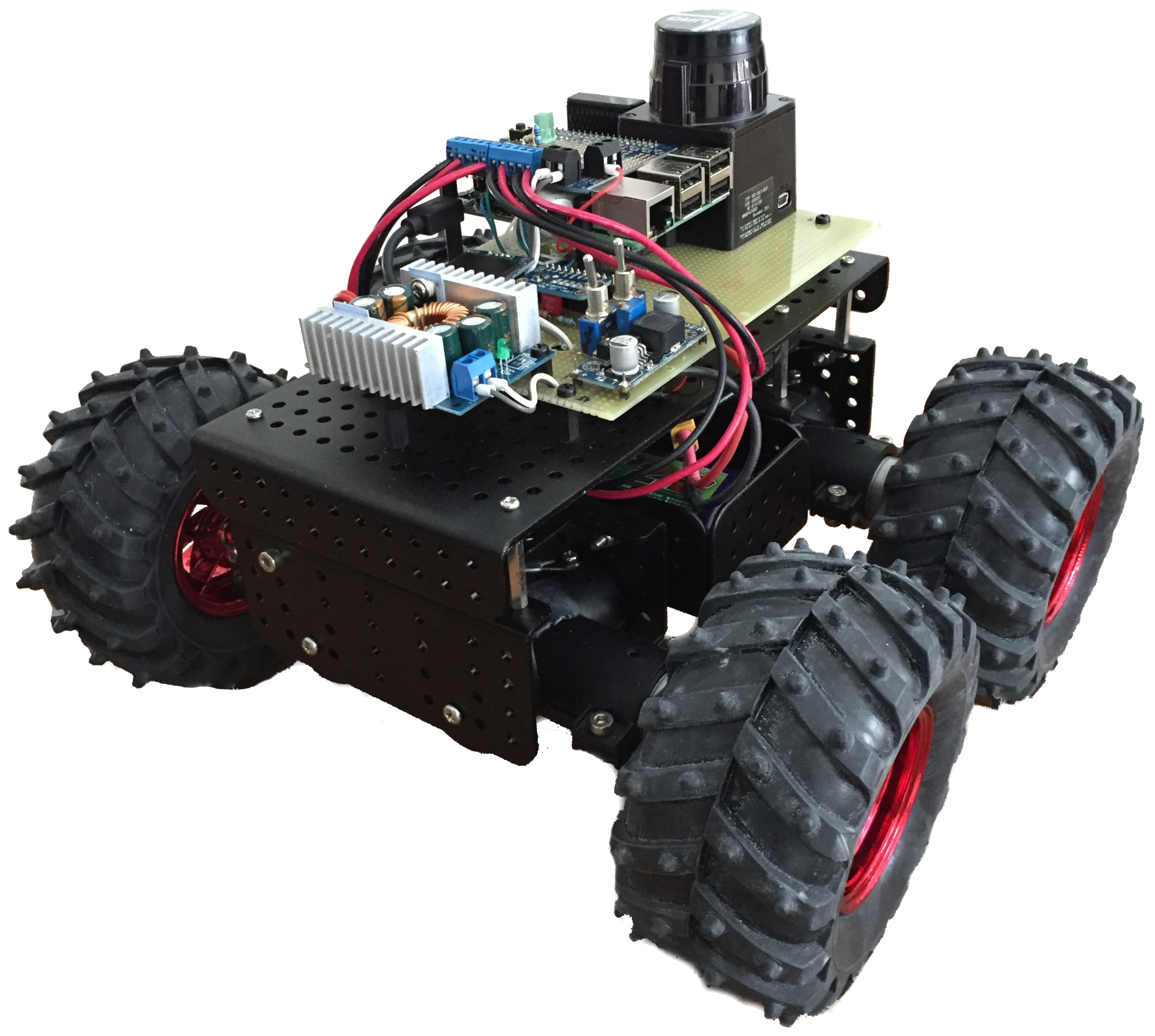
Chassis/Plattform
Als erstes haben wir das Chassis Arexx Wild Thumper (in der Vierrad-Version). Kosten: ca. 190€, zum Beispiel bei voelkner. Das Kit kommt fertig aufgebaut mit dem Metallgehäuse, vier Getriebemotoren mit eingebauten Rad-Encodern.
Rechts: Arexx RP5/6
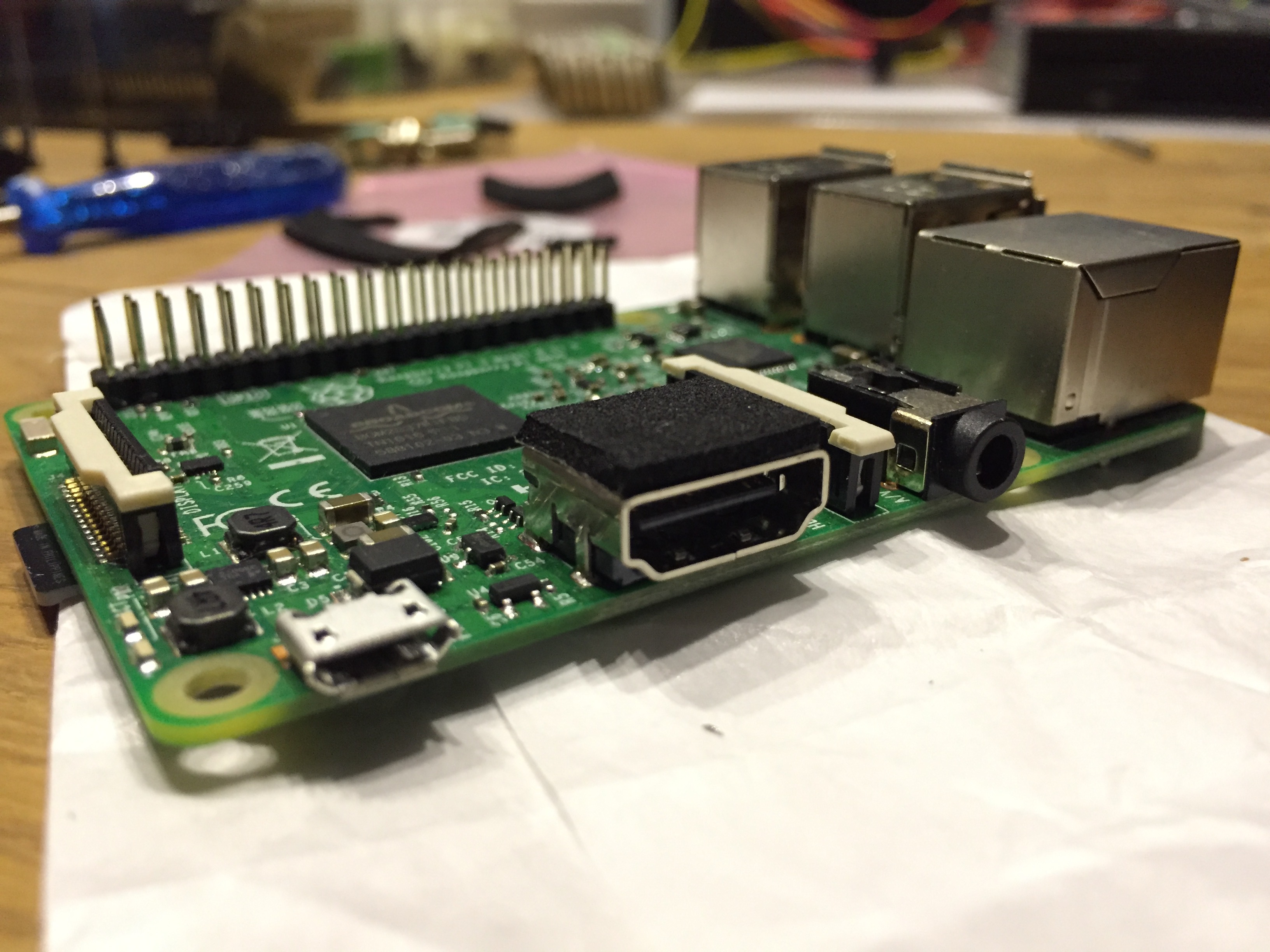
Steuerung
Herz des Roboters ist ein Raspberry Pi 3B für ca. 32 EUR. Auf diesem sind RASPIAN und ROS installiert:
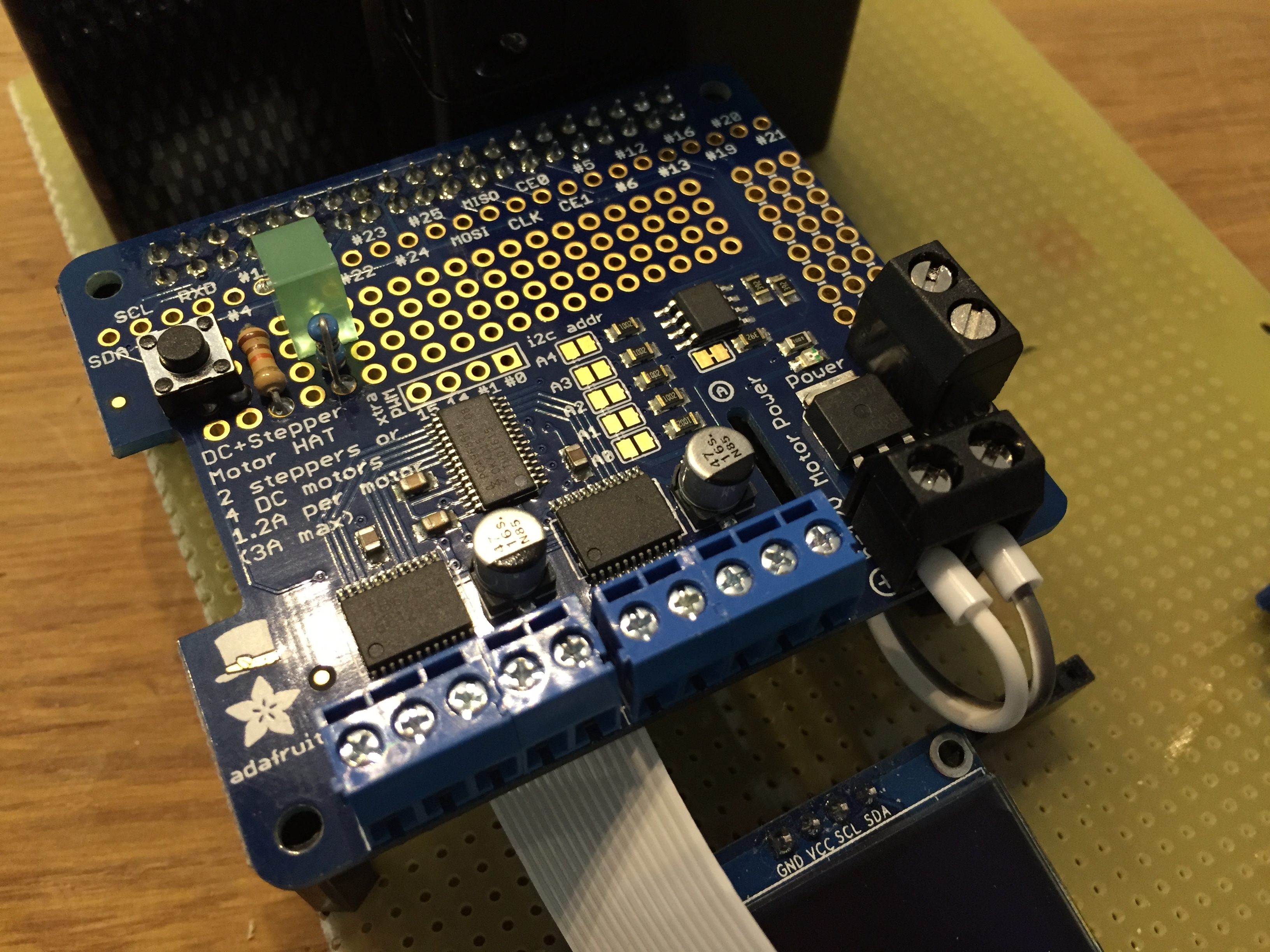
Motorsteuerung
Auf den Raspberry Pi kommt ein Adafruit Motor HAT zur Ansteuerung der Motoren und ein bisschen Kleinkram (LED, Widerstände, Taster, weitere Buchsen) für ca. 30€:
Schaltregler
Um die Akku-Spannung für die Motoren herunter zu regeln, wurde ein LAOMAO DC-DC-Wandler (Schaltregler) für ca. 10€ verbaut. Für die Stromversorgung des Raspberry Pi (5 Volt USB) wurde einfacher LM2569-Schaltregler für ca. 1,50€ verbaut:
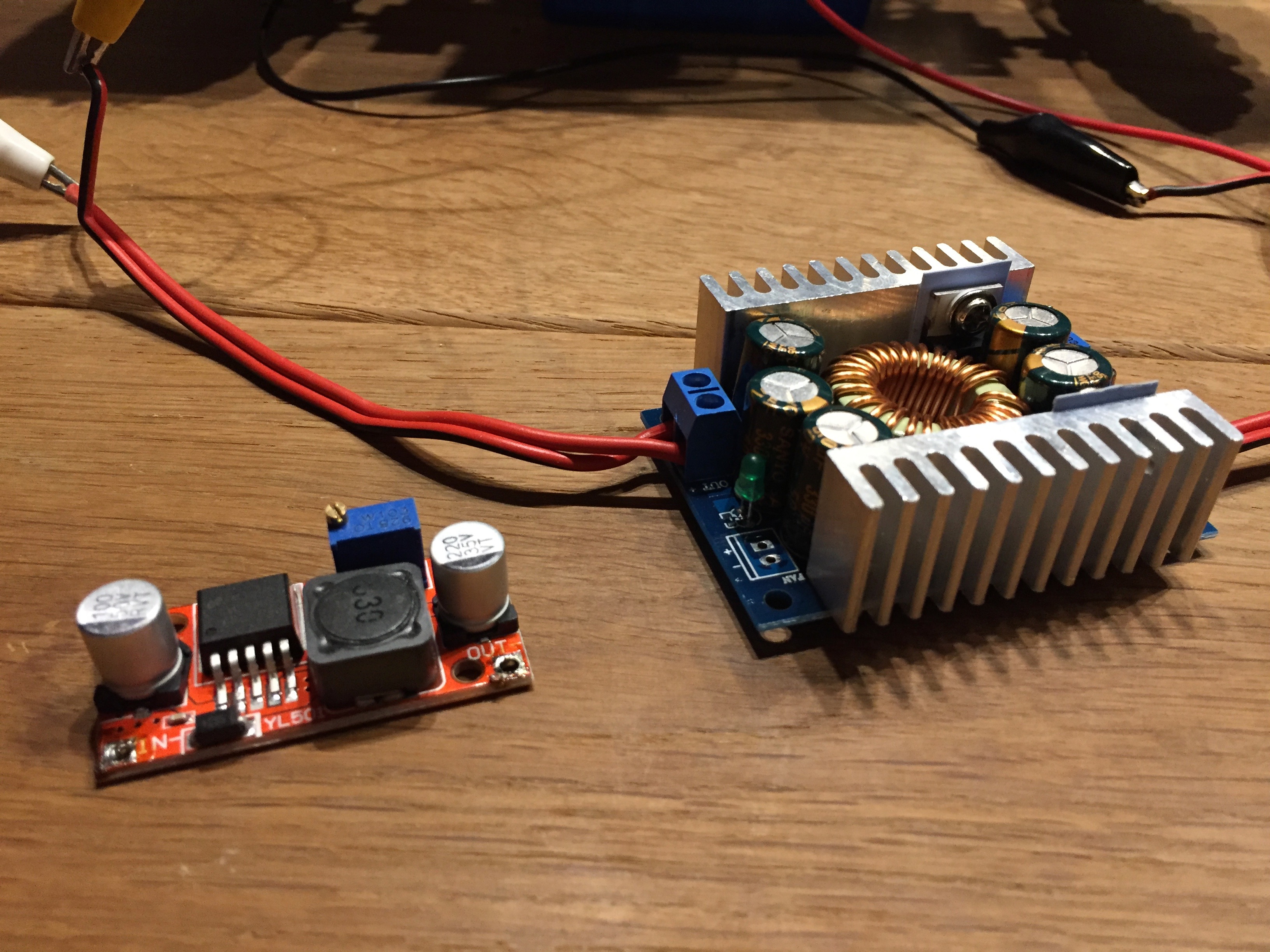
Links: Ein Standard-Schaltregler
AD-Wandler und Display
Um die Batteriespannung zu messen und zu überwachen, habe ich einen Adafruit ADS1015 AD-Wandler für ca. 13€ verwendet. Zur Anzeige einiger Systemwerte wie Akku-Spannung, IP-Adresse, CPU-Temperatur usw. verwende ich ein kleines 0,96″ OLED-Display für ca. 7€:
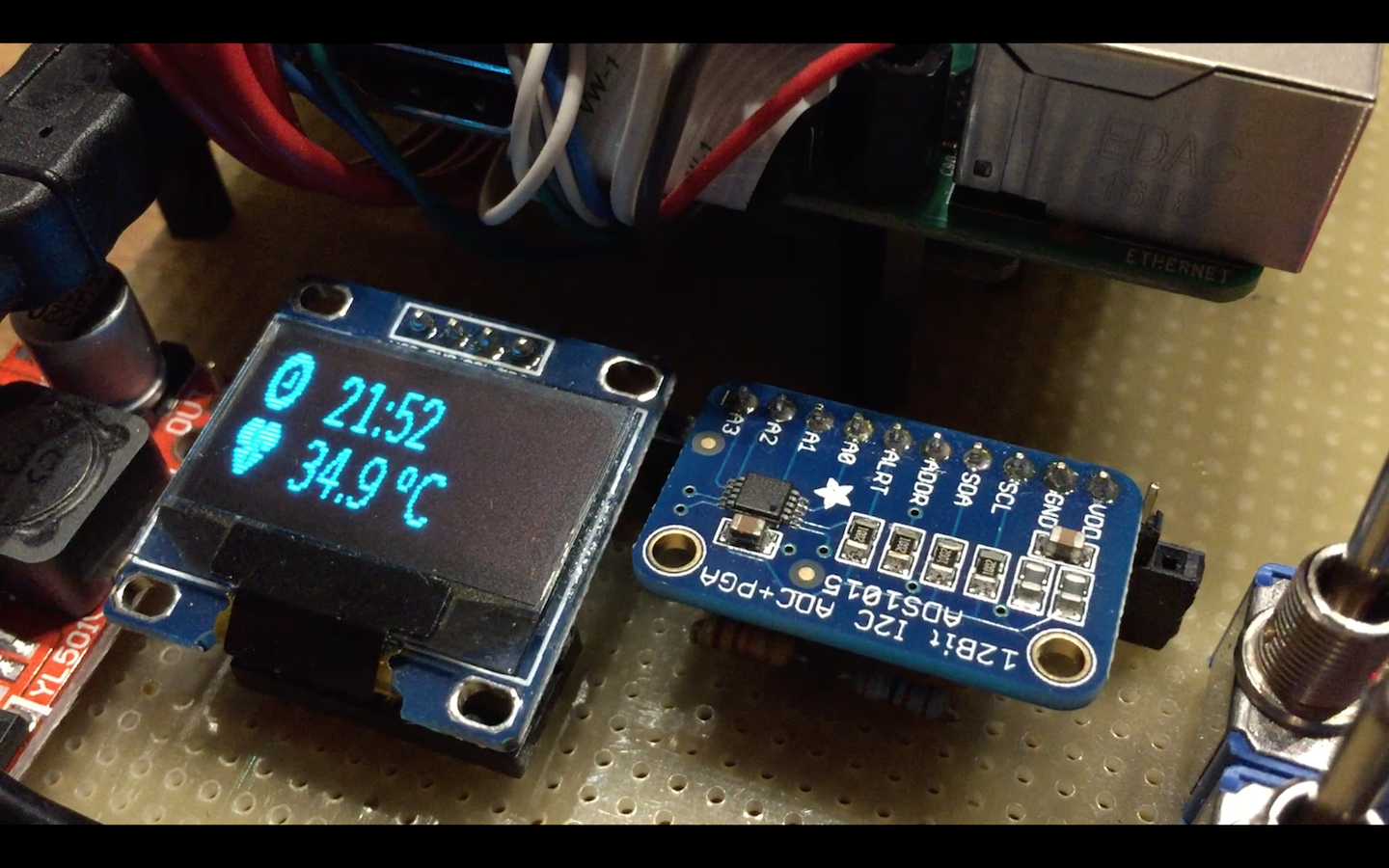
Links: OLED-Display
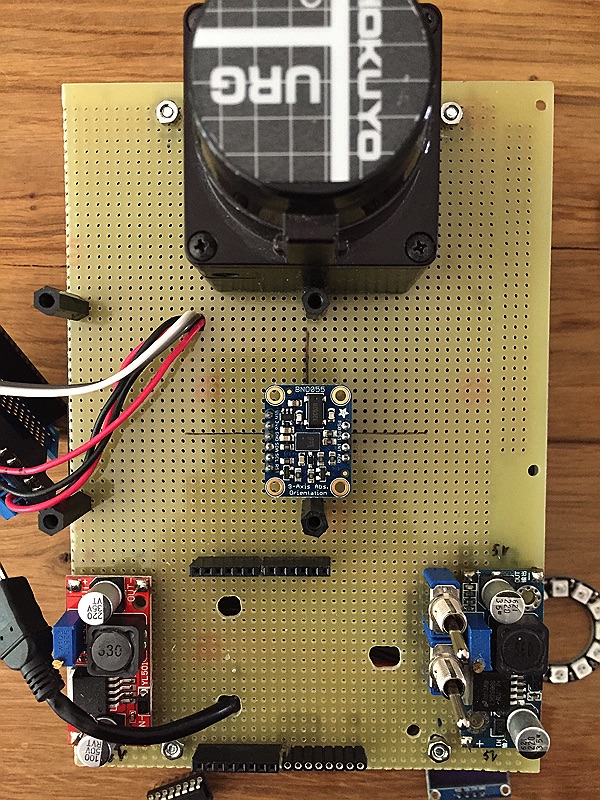
Lagesensor, Beschleunigungssensor und Kompass
Zur Lageerkennung und Ausrichtung (Kompass) habe ich das Adafruit 9DOF-Modul für ca. 38€ mit dem bekannten BNO055-Sensor von Bosch benutzt. Es ist unterhalb des Rasperry Pi verbaut und daher nur hier zu sehen:
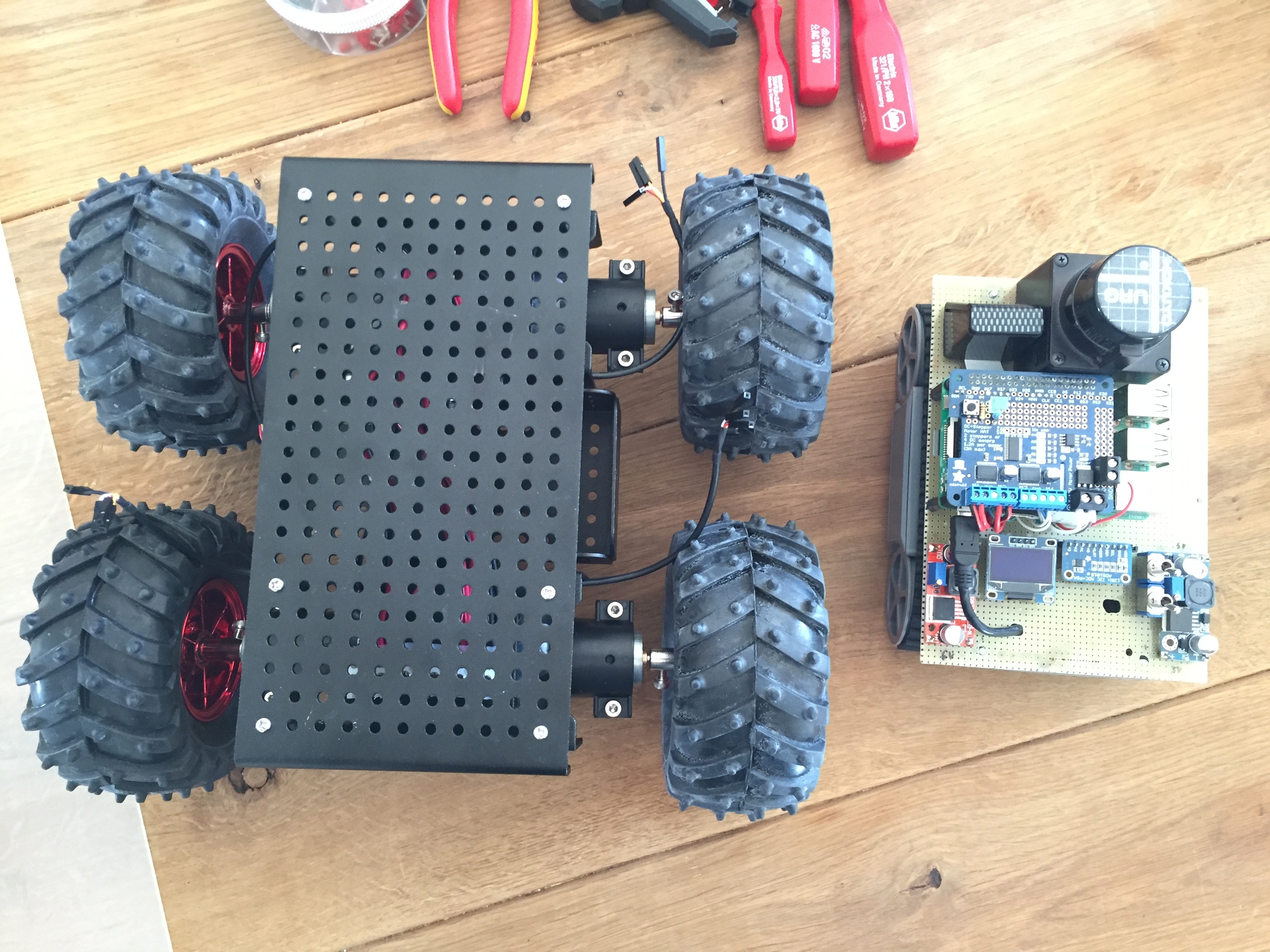
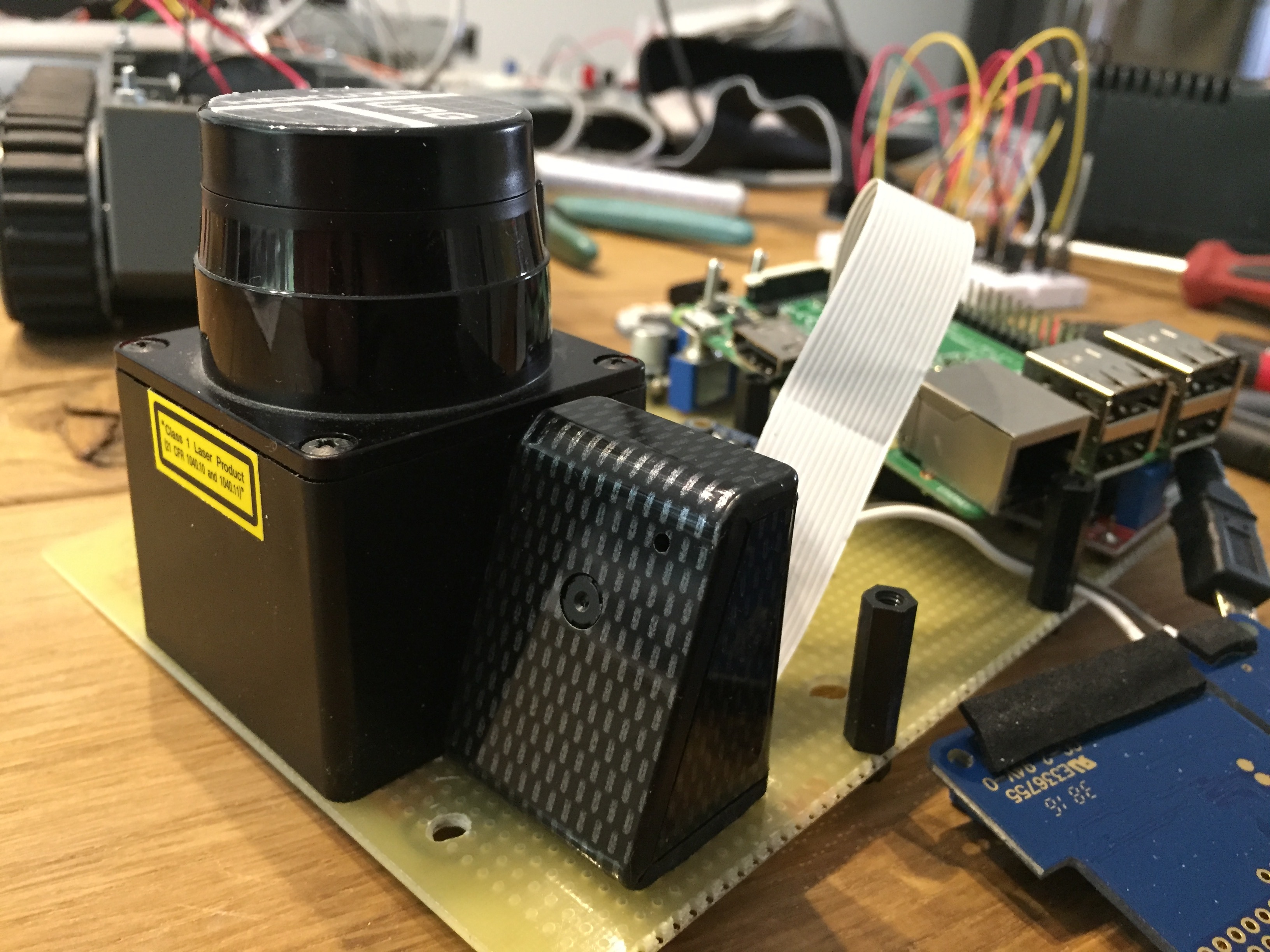
Laserscanner und Kamera
Zur Bildübertragung kommt eine übliche Rasperry Pi-Kamera für ca. 22€ zum Einsatz (in dem kleinen Gehäuse unten rechts im Bild).
Das teuerste Bauteil ist und bleibt leider der Hokuyo Laserscanner URG-LX04-UG01 mit USB-Abschluss für ca. 1000€:
Stromversorgung
Für die Stromversorgung wird ein handelsüblicher LiPo-Akku 3S (11,1 Volt) mit 2,2 Ah Kapazität für ca. 24€ verwendet.
Sonstiges
Zusätzlich sind noch ein Piezo-Signalgeber und zwei Kippschalter verbaut, und natürlich die Grundplatine, auf der alles montiert ist und viele Strippen, die man nur unten nicht sieht. ;-)
Alles bei Amazon?
Nein, ich habe nicht immer alles für Amazon bestellt. Aber als schnellen Einstiegspunkt habe ich diese Affiliate-Links hier verwendet.
Hi Markus,
eine Frage: Ich versuche an meinen Robi die Stromversorgung des RasPi 3B+ über den Schaltregler LM2596S zu realisieren… Leider ist mir aufgefallen, dass im Monitorbetrieb (über HDMI) das Blitz-Symbol angezeigt wird. Könnte es daran liegen, dass der Pi3B+ mehr Leistung abfordert? Ich meine mich zu erinnern, dass du mittlerweile auch den Pi3B+ verbaut hast. Schn mal Probleme dieser Art gehabt?
Grüße aus Ostfriesland
Thomas
Hi Thomas,
das Blitzsymbol sagt mir so gar nichts, da ich meine Raspis alle ohne Monitor betreibe.
Ich könnte mir aber vorstellen, dass die Motoren zuviel Strom ziehen und dir Probleme machen, wenn sie am gleichen Akku hängen.