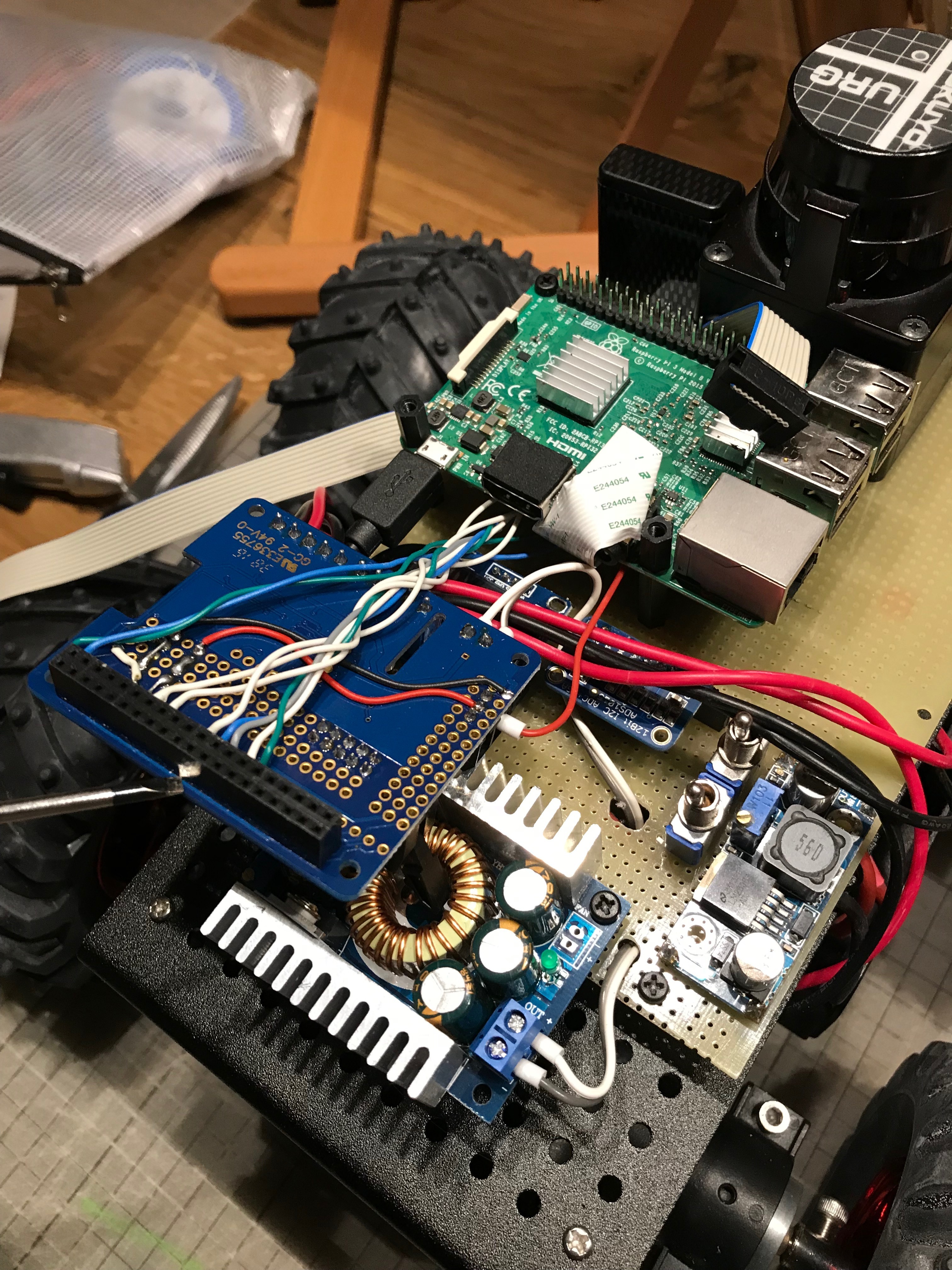
Na ja, was soll man von fertig aufgebauten, mit Heißkleber zugeschmadderten Kabeldurchführungen auch halten…
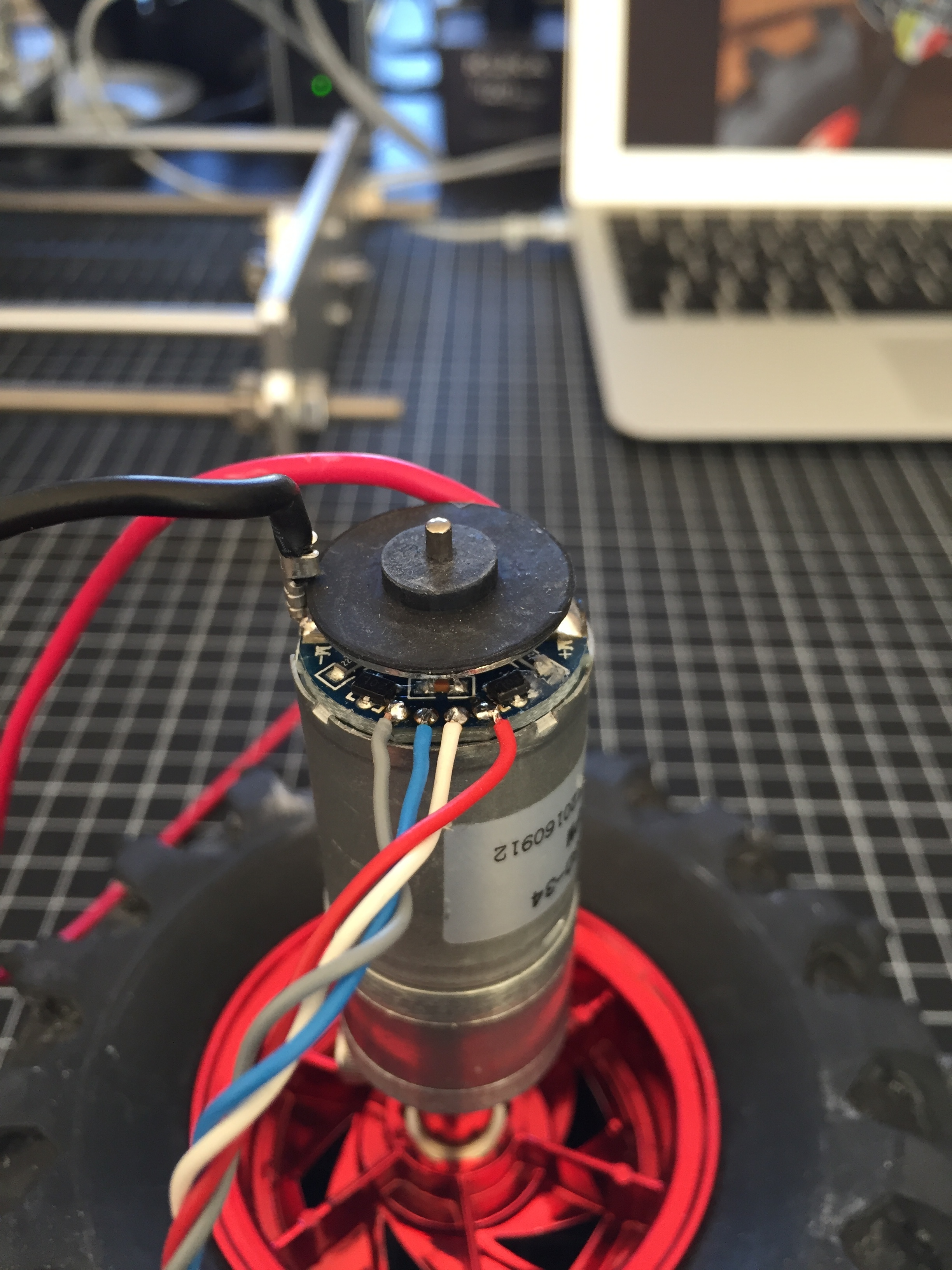
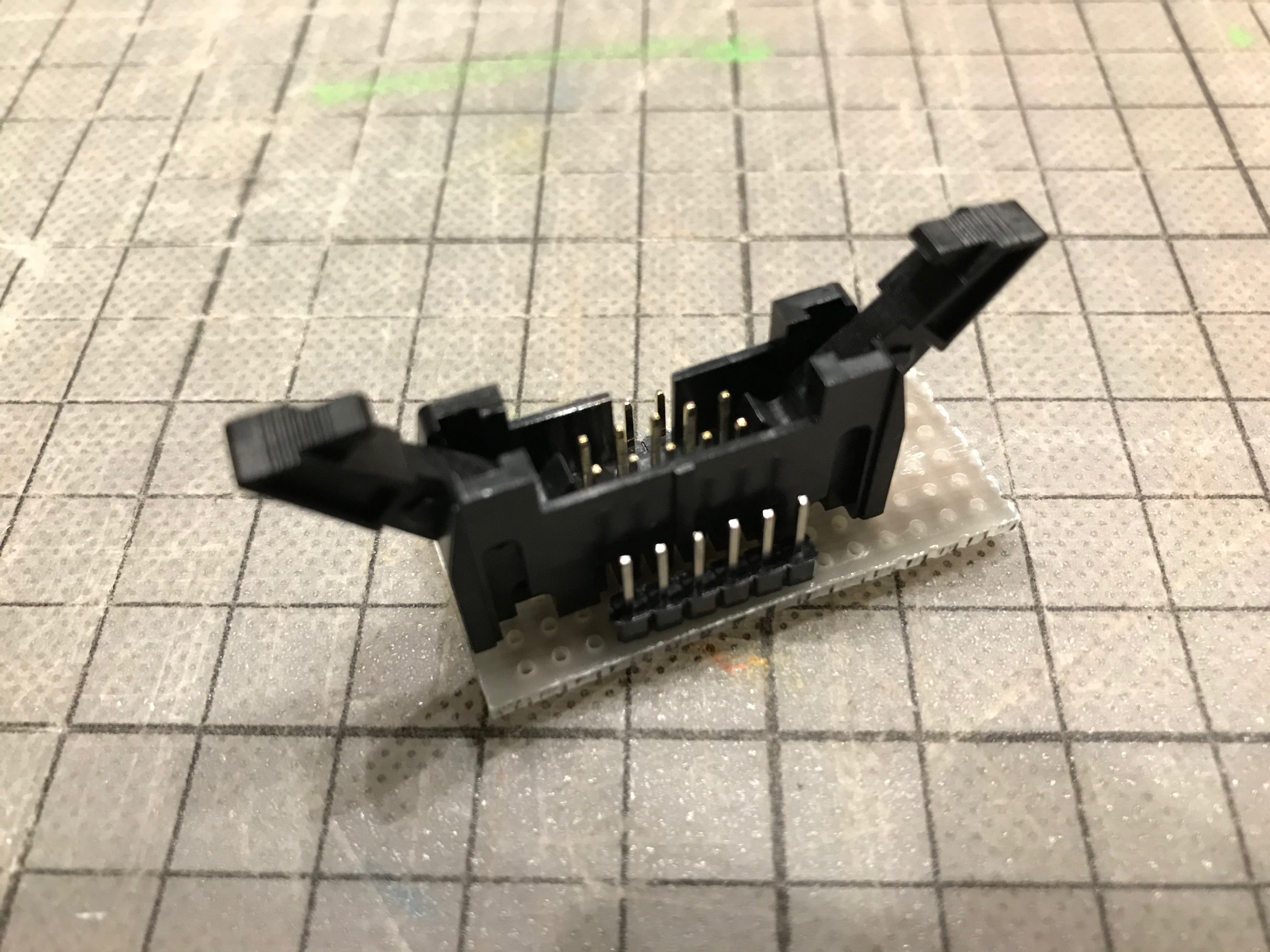
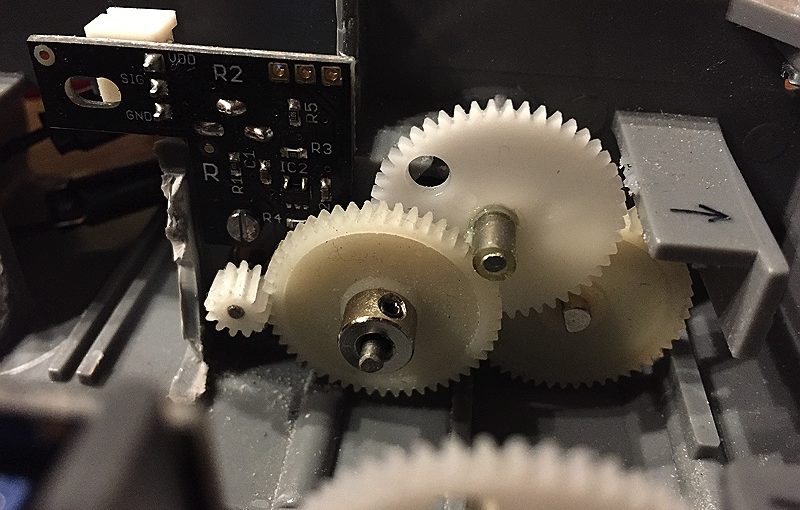
Nach langer Fehlersuche mit einem der Motorencoder stellte sich schlicht und einfach heraus, dass die Lötstellen von wirklich schlechter Qualität sind; na ja und die Leitungen eigentlich auch. Aber gut, flus das ganze auseinander gebaut, vom Kleber befreit und neu verlötet:
Nicht wirklich leicht zu demontieren… 
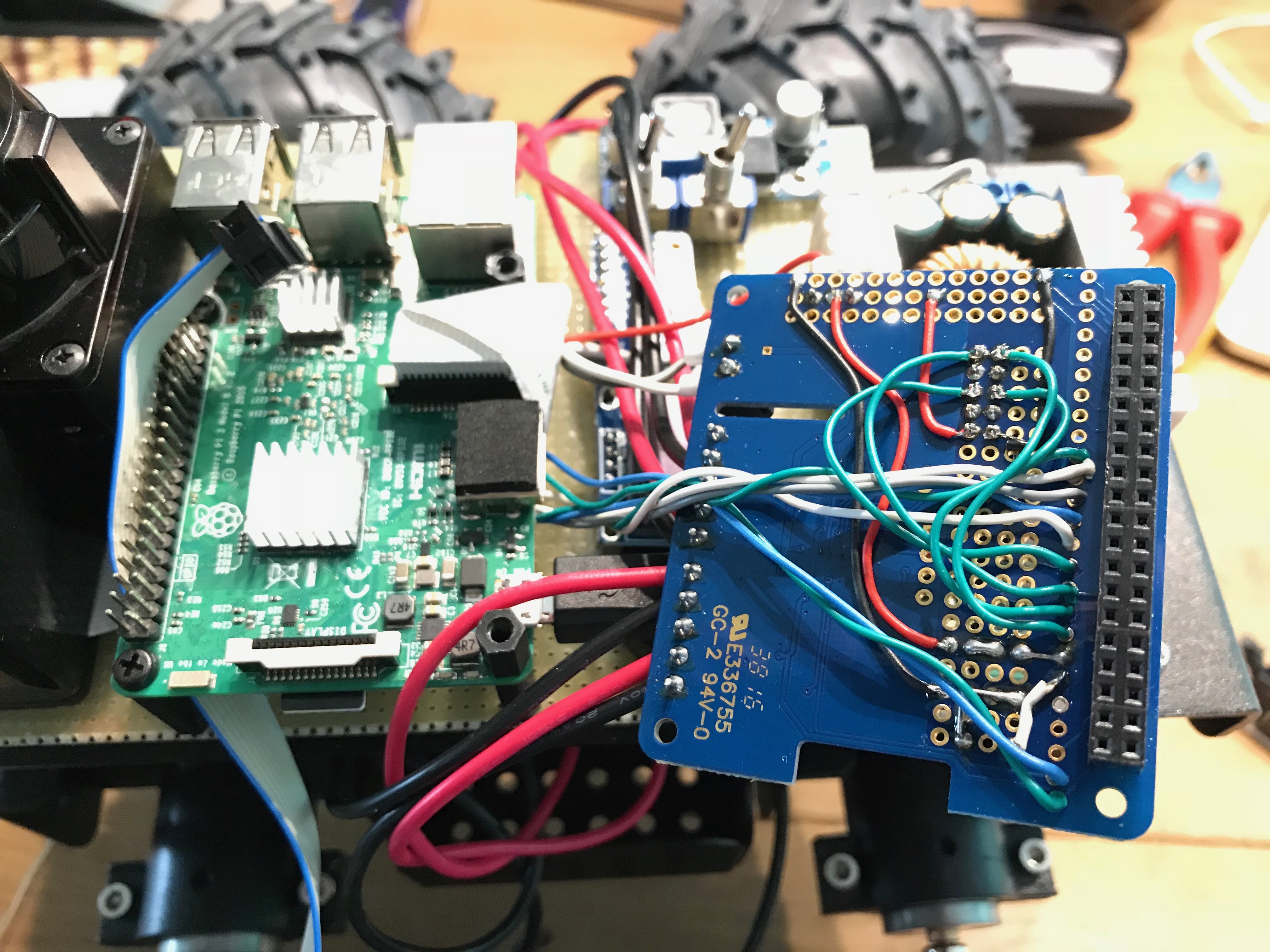
Vorher 
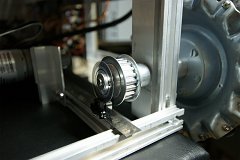
Nachher
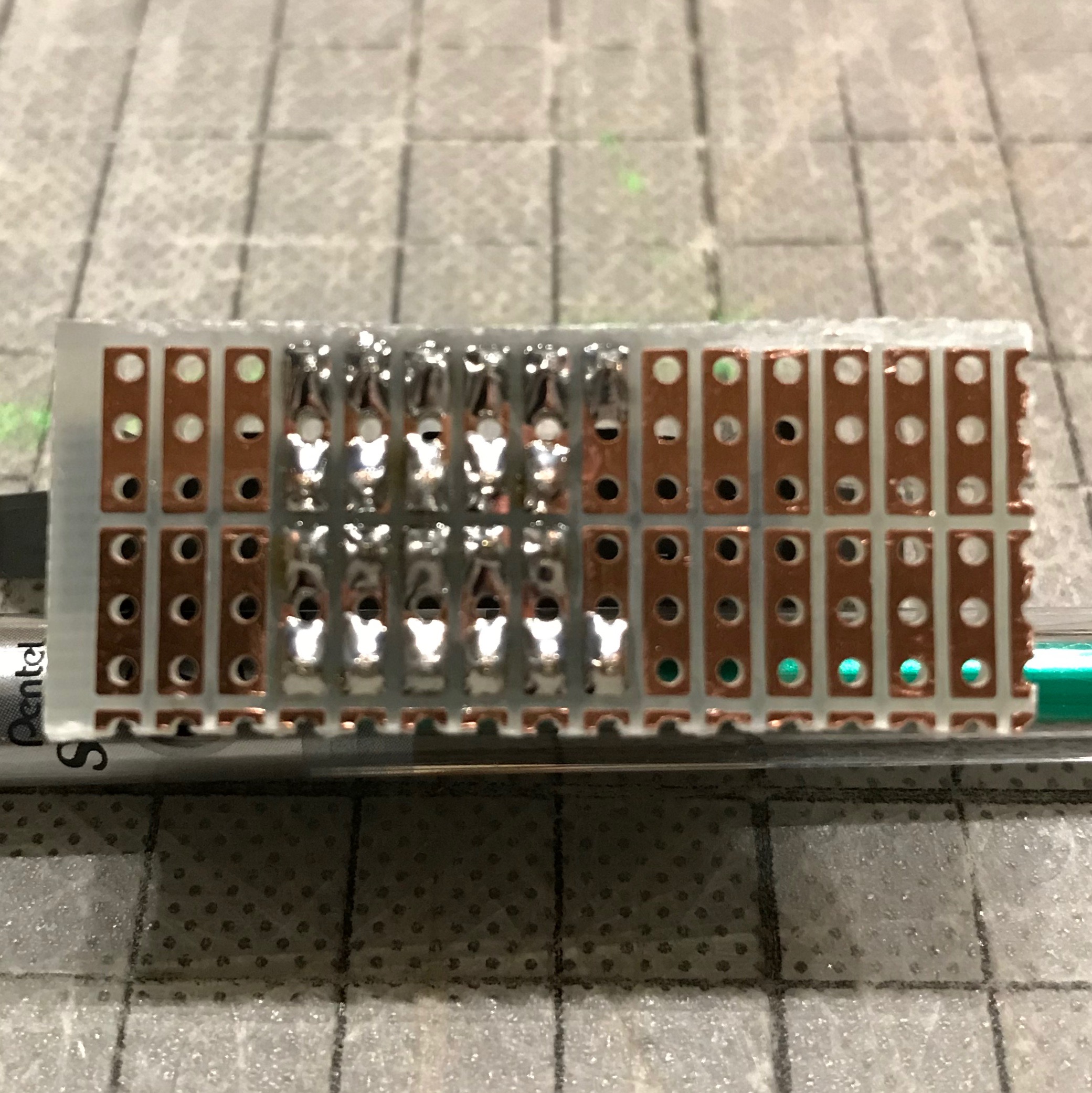
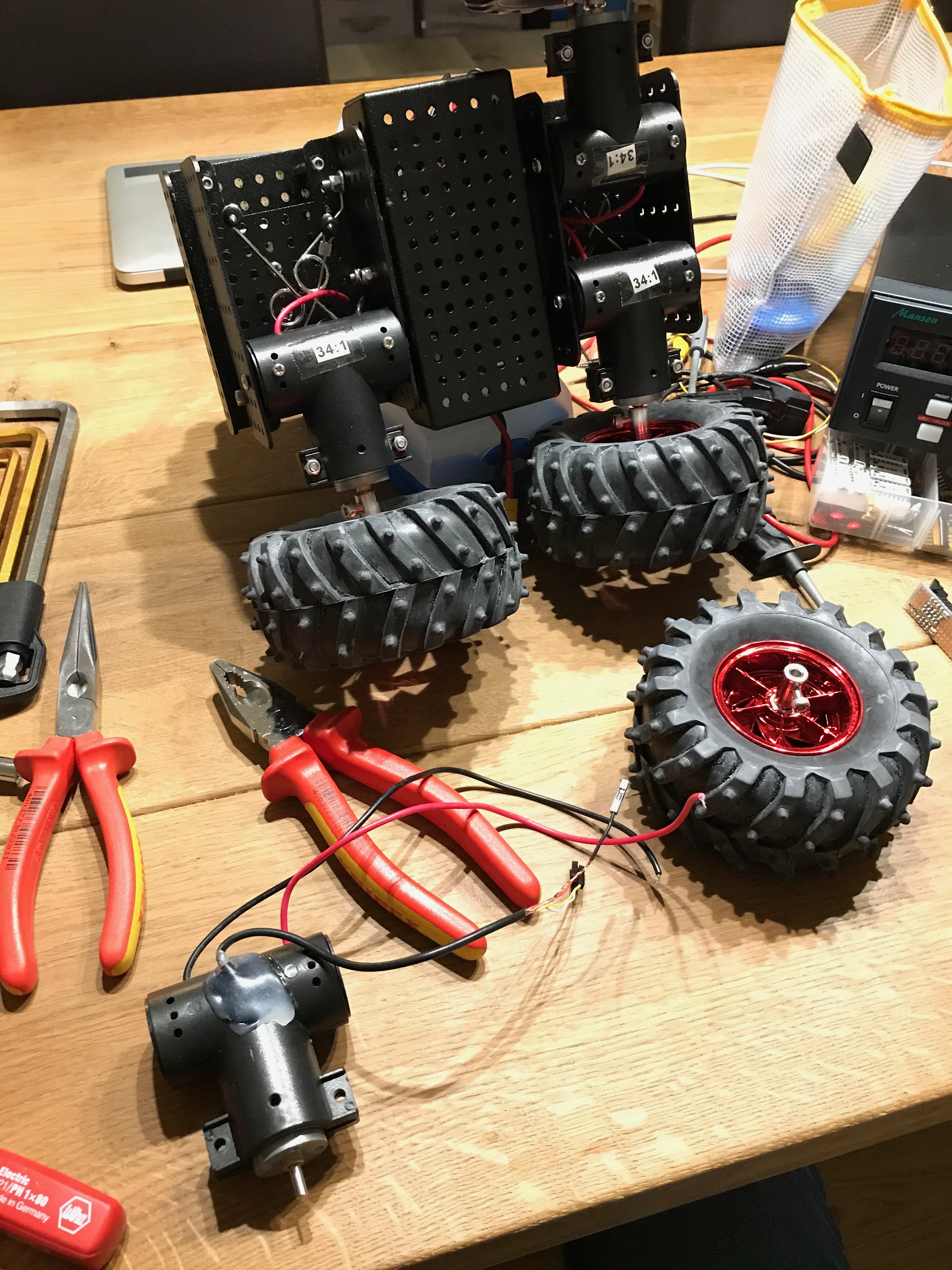
Toll dann, wenn man alles fertig hat und nach einiger Zeit wieder eine Leitung ab ist… Hatte ich erwähnt, dass die Leitungen offenbar nicht die tollsten sind? Also gut, nun eigene angelötet und hoffen, dass diese länger halten: