Um die Zeit nach dem fit-PC-Tod zu überbrücken, wurde der erste zum Testen mal ein Rad-Encoder montiert. Dazu wurde als erstes eines der Räder vollständig mit Achse entfernt:

Wie zeichnet man nun mitten auf der 10mm Stahlachse einen Punkt ein. Gelöst wurde dieses ganz gut, durch ein paar Linien auf einer transparenten Folie. Durch diese wurde dann die Achse angekörnt und ein 2,5 mm Loch hinein gebohrt:
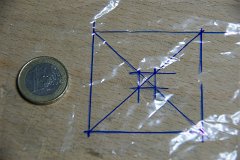

Normalerweise wäre jetzt das Loch auch in der Mitte gewesen, aber leider drückt sich aufgrund der Härte des Stahls beim Bohren der Werkstoff nach unten womit das Loch dann leider nicht mittig wurde. So oder so sieht das ganze mit 3m Gewinde dann so aus:

Macht aber nichts. Mit zwei Unterlegscheiben, längerer Schraube und Mutter wurde nun die Encoderscheibe befestigt:




Diese wurde nun auf der Achse montiert, in dem die 3mm Schraube in das neue Gewinde geschraubt wurde. Da der Innendurchmesser der Encoderscheibe größer als 3mm ist, konnte diese recht gut wieder mittig justiert werden:


Und so sieht das ganze dann wieder komplett montiert aus. auf dem letzten Bild liegt zu Testzwecken bereits die Gabellichtschranke, die dort später "irgendwie" montiert werden muss:



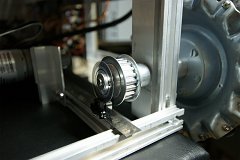







 Das ist gerade in Klärung…
Das ist gerade in Klärung… 

