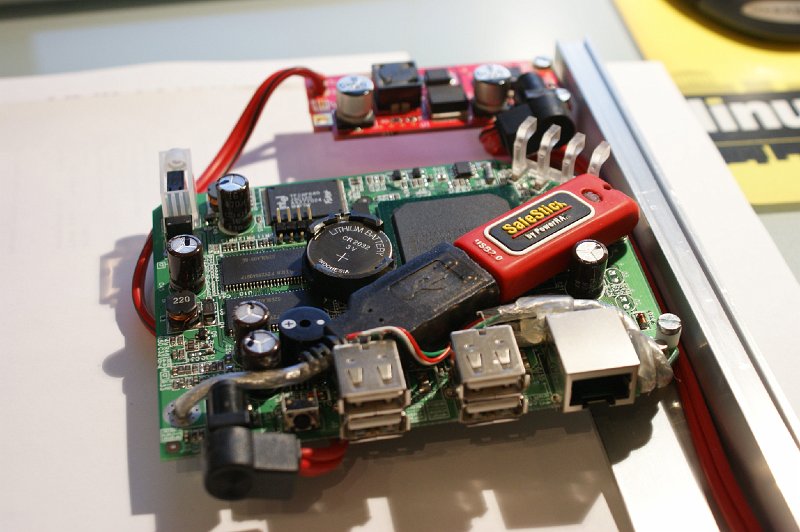
Da die NSLU2 wegen zu geringer Rechenleistung und zu wenigen USB-Ports wohl einem "richtigen" Mainboard weichen wird, wurde an der bereits im Sourcecode integrierten Sprachausgabe weiter gefeilt. Konkret: festival wurde aufgrund ständiger Probleme mit der library entfernt und durch espeak ersetzt. Die Umstellung war in nur wenigen Schritten erledigt. Außerdem ist es nun ein eigenständiger Thread, der während des Sprechens im Hintergrund läuft und die Bedienung der GUI weiterhin möglich ist – so wie man es erwarten sollte. :-) Auch wird bei neuen Sprachbefehlen, eine möglichweise gerade aktive Sprache sofort gestoppt und mit der neuen unmittelbar begonnen.
Ton-Beispiele gefällig? So klingt das ganze auf Englisch:
Und es gibt auch – was bei Open Source nicht ganz so häufig in guter Qualität anzutreffen ist – eine deutsche Sprachausgabe. Diese klingt dann so:
Die bisherige, recht schlecht zu verstehende Hardwarelösung wird demnach dann auch bald entfallen. Die Lautsprecher mit Verstärker werden natürlich weiterhin genutzt werden können.





















{kind=link}