Da das ewige An- und Abklemmen der Stromversorgung vom bzw. an den Akku immer recht umständlich ist und es auch nett wäre, wenn man die Roboter-Akkus "von außen" aufladen könnte, wurden zwei Buchsen hinzugefügt und entsprechend mit zwei Schaltern verabelt. Diese decken erst einmal die Haupt-Stromversorgungsakkus (12V) ab. Die 24V-Stromversorgung für die Laserscanner wird ggf. auch noch um Buchsen und Schalter erweitert.
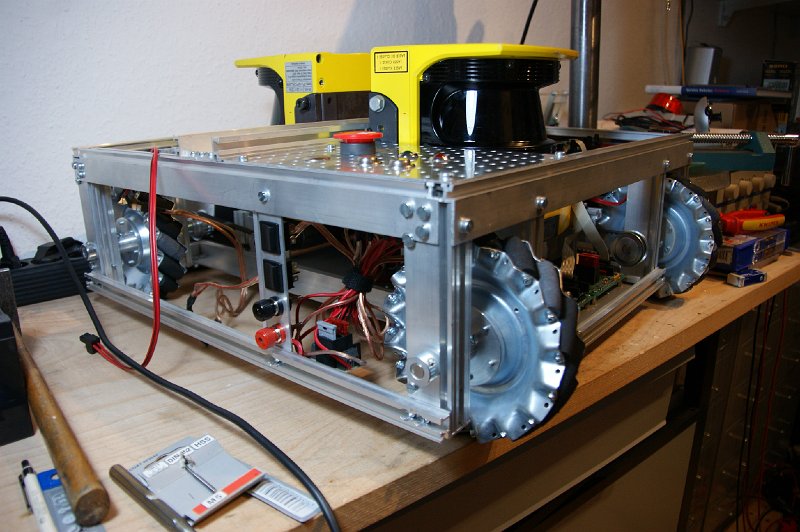
Als erstes wurde eine praktische Stelle für die Schalter und Buchsen ausgewählt…
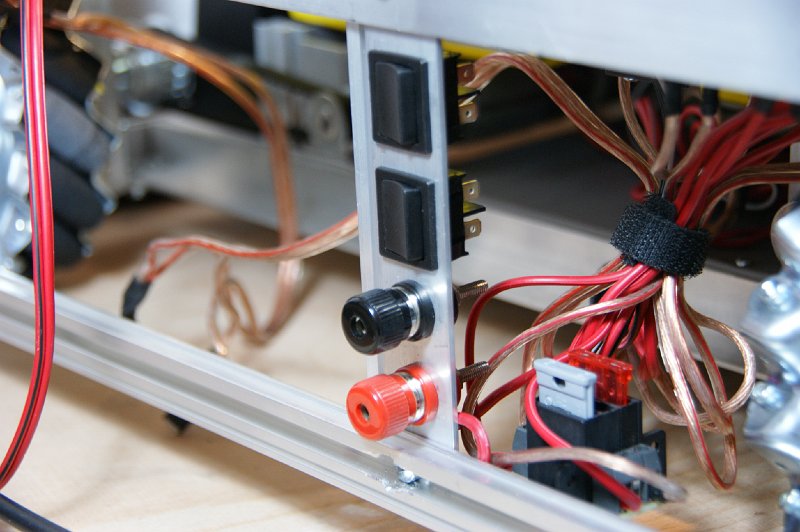
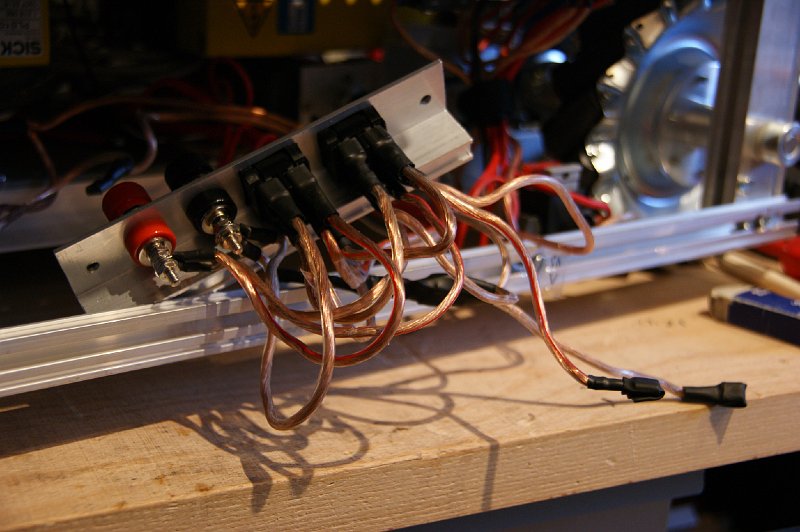
…dann die Schalter und Buchsen korrekt verkabelt…
…dann doch noch einmal darüber nachgedacht. Und dann noch mal ein Schaltplan skizziert…

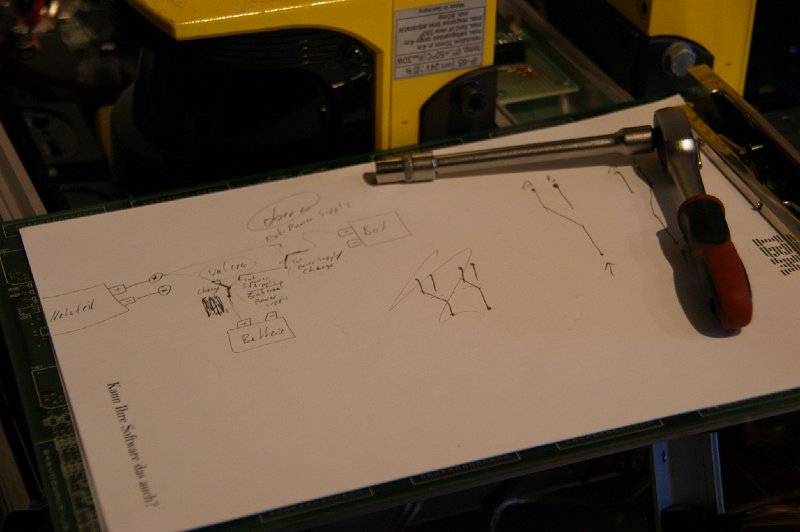
…und noch mal alles geändert:
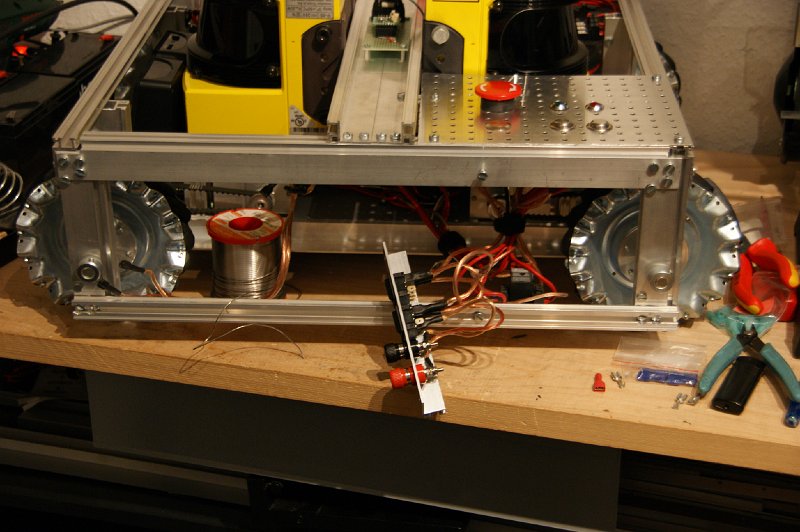
Es folgte ein erster Test. Eingeschaltet…nicht passiert…ausgeschaltet…Stecker geprüft…
…Sicherungen überprüft…
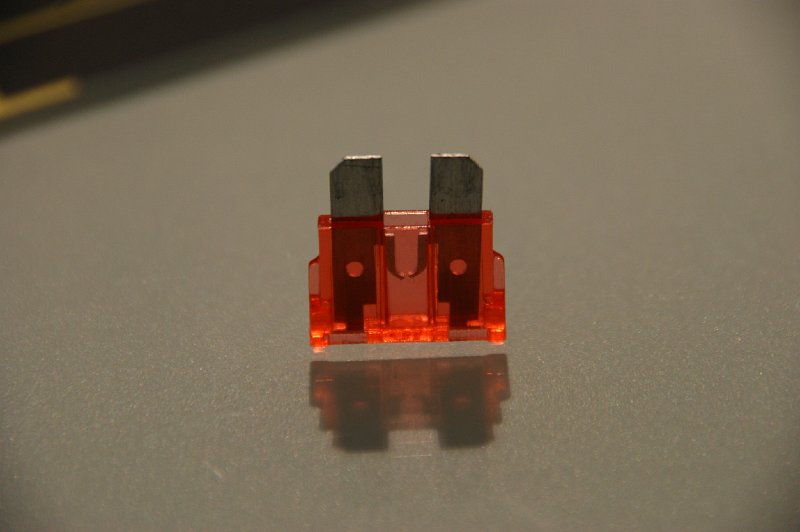
Das war also ein satter 10 Ampère-Kurzschluss. Immerhin: Allles heil geblieben (bis auf die Sicherung). Das Sicherungskonzept hat sich also schon mal bewährt. :-)
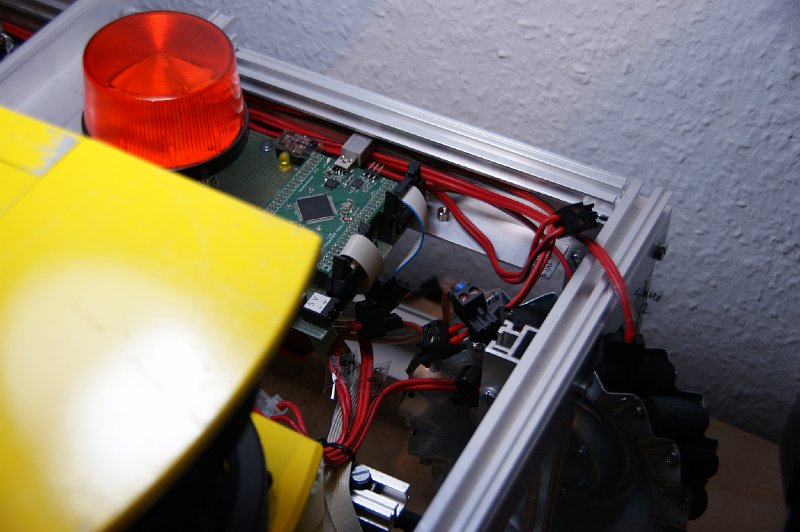
Nach langer, wirklich langer Suche stellte sich nun heraus, dass zwei (nicht beschriftete) hier Stromstecker vertauscht waren:
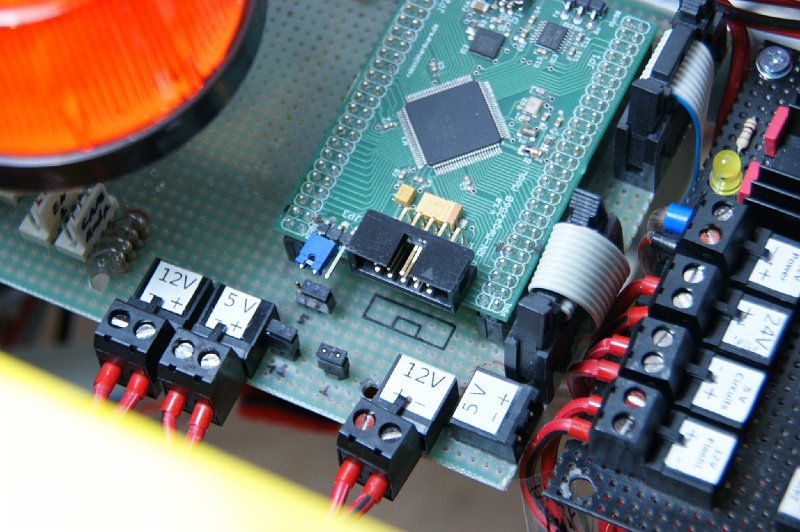
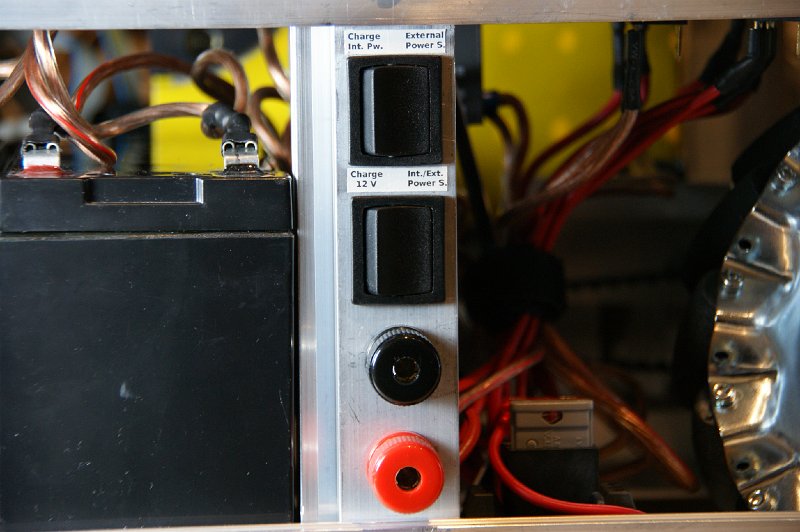
Wie man in dem Bild sieht, sind zwar die Buchsen beschriftet, aber die Stecker noch nicht alle. Das wurde nach dem Foto dann nachgeholt. Und siehe da: Nun funktionierte es wie gewünscht. Als letztes wurden noch die Umschalter beschriftet, die die folgenden Zustände nun schalten:
- Stromversorgung des Roboters über die Buchsen über eine externe Spannungsquelle (Netzteil)
- Stromversorgung des Roboters über die eingebauten Akkus
- Laden der Akkus über die Buchsen über eine externe Spannungsquelle (Netzteil)
Und so sieht das abschließend aus: