Kein leichtes Unterfangen. Wie man sieht, musste das halbe Arbeitszimmer bei der Aktion mit „dran glauben“:

Als erstes wurde das Rad demontiert und und zwei Löcher in das sehr massive Stahlblech gebohrt:

Anmerkung: Mit normalen HSS-Bohrern war das übrigens nicht möglich. Erst mit Titan-beschichteten HSS-G-Bohrern ging das problemlos.
Durch die gebohrten Löcher kam eine passend gesägte 6mm Edelstahlwelle gehalten von zwei Durchführungs- und Lagerbuchsen A6 aus Super-Ployamid (selbstschmierend):

Zusätzlich auf die Achse kam ein Zahnrad, welches durch den Zahnriemen die Achse antreiben soll. Das Rad vom Roboter wurde danach auch wieder montiert:


Danach kam die Encoderscheibe auf die Achse:


Und dann die Gabellichtschranke:

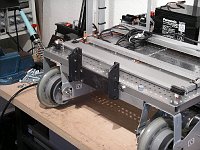
Und so sieht das Ergebnis für heute aus:

Die andere Seite, also den zweiten Encoder mit Achse usw., werde ich wohl ein andern Mal montieren, da die Arbeiten heute schon ein paar Stunden in Anspruch nahmen. :-(
Wenigstens ist Verkabelung des Sensors schon erledigt, da die Stecker usw. ja schon auf dem Controllerboard drauf waren – siehe alte Fotos…