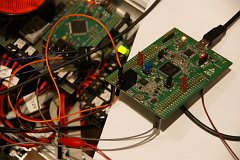
Die Arbeit mit dem STM-Board macht Fortschritte: Beim letzten Update wurde der Code für das ARM-Board derart aktualisiert, dass 2 Bits als Ausgänge definiert wurden. Diese wurden in fliegender Verdrahtung mit einander verbunden, so dass die Eingänge des Motorcontrol-Boards direkt am STM32F4-Board angeschlossen wurden. Interessant ist hierbei, dass das Motor-Board – entgegen den 3,3 Volt des STM-Boards – 5 Volt-Logik aufweist. Das geht jedoch in dieser Richtung, da die 3,3 Volt (HIGH) am Ausgang auch als HIGH vom Motorcontroll-Board akzeptiert werden weil sie innerhalb der Spezifikation liegen. Und so sieht das Ganze dann aus:

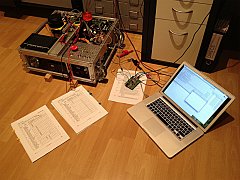
Nun wurde das das STM-Board per USB mit dem MacBook verbunden, ein Terminal-Programm gestartet, welches Befehle an das STM-Board sendet:

Und: Es fuktioniert! Der Motor 1 dreht in beide Richtungen entsprechend der seriellen Befehle – wie zuvor mit dem Atmel-Board. Und im Sourcecode wurden lediglich die neuen ARM-Ports angegeben und die Befehle zum Bit-Setzen und -Löschen angepasst. Als nächstes muss geprüft werden, wie bei dem ARM-Board PWM funktioniert, damit z.B. die Motorgeschwindigkeit Richtung Motorcontrol-Board „gesendet“ werden kann.
Das Gute an dem Motorcontrolboard: Die benötigte PWM-Spannung Vpwh kommt hier ebenfalls mit 3,3 Volt klar (min. 3,25 Volt). Die Versorgungsspannung des verwendeten Motortreiber ICs VNH2SP30-E benötigt jedoch mindestens 5,5 Volt und maximal 16 Volt – aber diese stehen auf dem Bot ja ohne weiteres zur Verfügung.