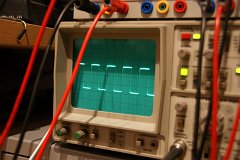
Nachdem die Motoren des Roboters erfolgreich mit dem noch recht neuen STM-Board über PWM angesteuert wurden, musste nun noch ein Test mit den RGB-LEDs erfolgen. Hier war nicht die Frage, ob PWM funktioniert, sondern viel mehr, ob die 3,3 Volt Pegel einwandfrei mit den Optokopplern funktionieren. Die Optokoppler sind nämlich hier nötig, da die RGB-LED-Streifen mit 12 Volt angesteuert werden. Das Ergebis war aber erfreulich:



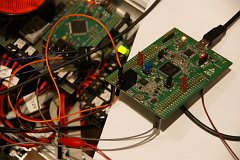
Übrigens die im Bild verwendeten Kabel zum Verbinden des STM-Boards habe ich bei Watterott bestellt.
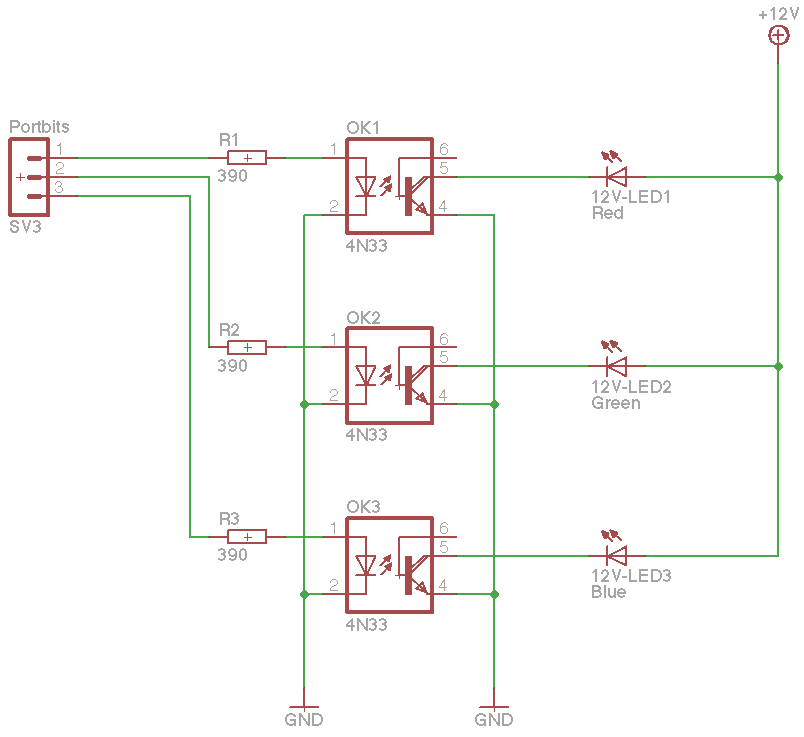
Und wen es interessiert, wie die LED-Streifen angesteuert werden: