Wie schon zuvor beschrieben, soll der Atmel-Controller eine von der Motorspannungsversorgung unabhängige Spannungsquelle erhalten. Da auf dem Roboter nur zwei verschiedene (24 und 12V) vorhanden sind, bleiben somit nur die 24V übrig.
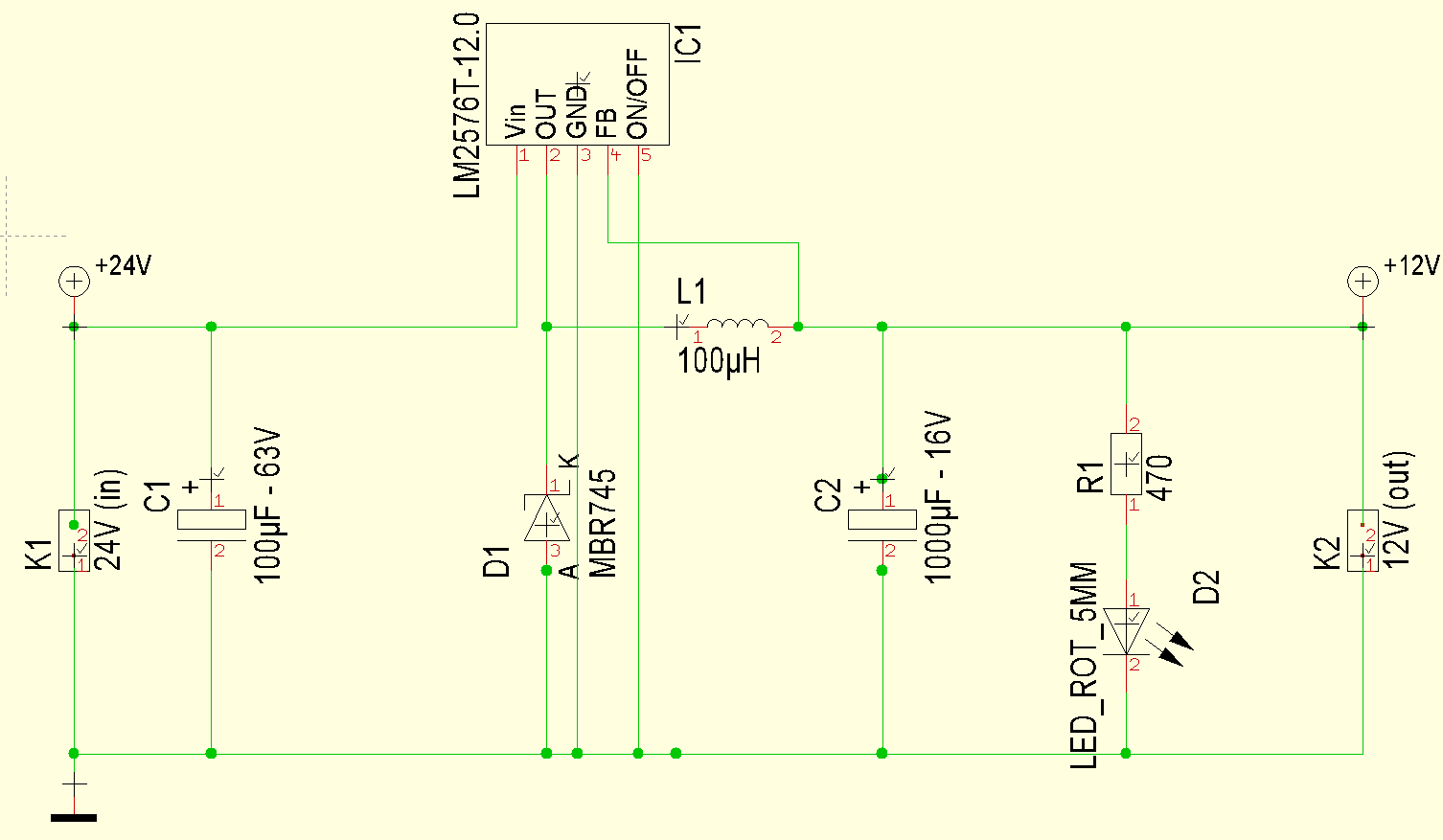
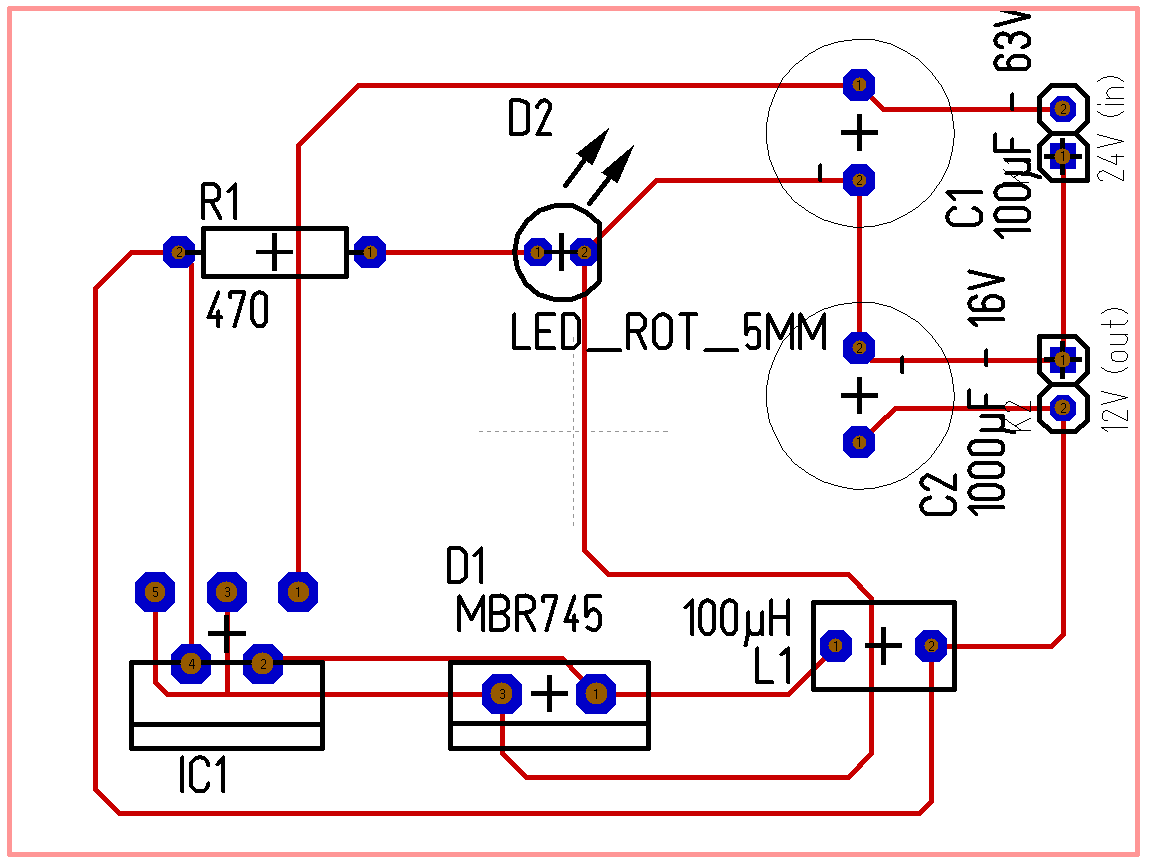
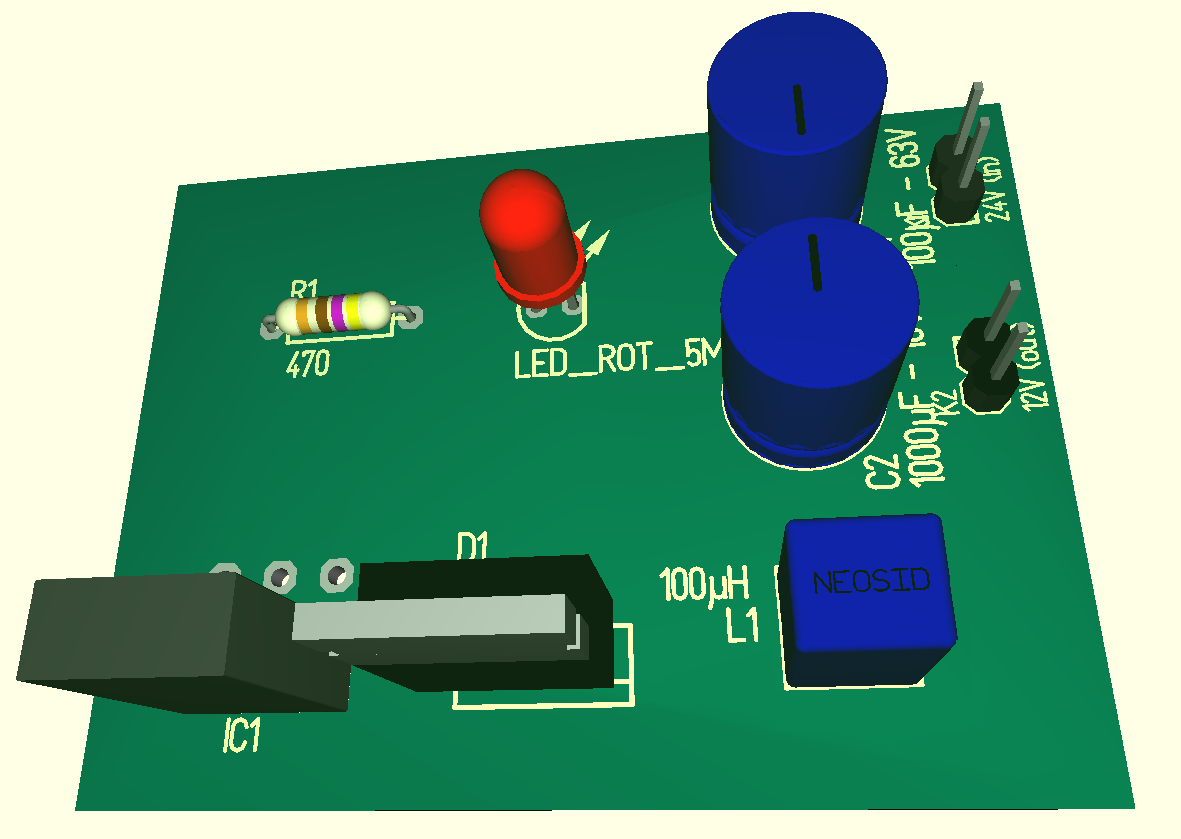
Um die überschüssige Energie nicht unnötig (per Spannungsregler) in Wärme zu verwandeln, werden dazu heutzutage Schaltregler verwendet. Hier bietet sich der 2576-T5 Schaltregler geradezu an. Mit nur 5 Bauteilen ist das leicht verdrahtet und aufgebaut. Einen simplen Schaltplan für eine Regelung auf 5V gibt es hier. Bei den geringen Strömen, die das Atmel-Board nur benötigt, reicht sogar eine hübsche kleine SMD-Spule Hier sieht man den Aufbau, Test und das Ergebnis: