Inspiriert durch dieses Kunstprojekt, dachte ich: „Ein Gewitter imWohnzimmer? Das kann ich auch bauen!“.
Das war bereits 2019 – hier nun endlich die Fotos, die den Zusammenbau und die benötigten Einzelteile dokumentieren.
Arduino Nano bzw. DFRduino NanoSonderposten bei NANU NANAVisaton DL5 LautsprecherAdafruit PushbuttonDas Stereo-Verstärkermodul mit DAYPOWER-VM-MP3-2×15 von PollinTest des Adafruit Audio-Moduls VS1053Eine hohle MessingstangeEin Kunstkubus von Bösner
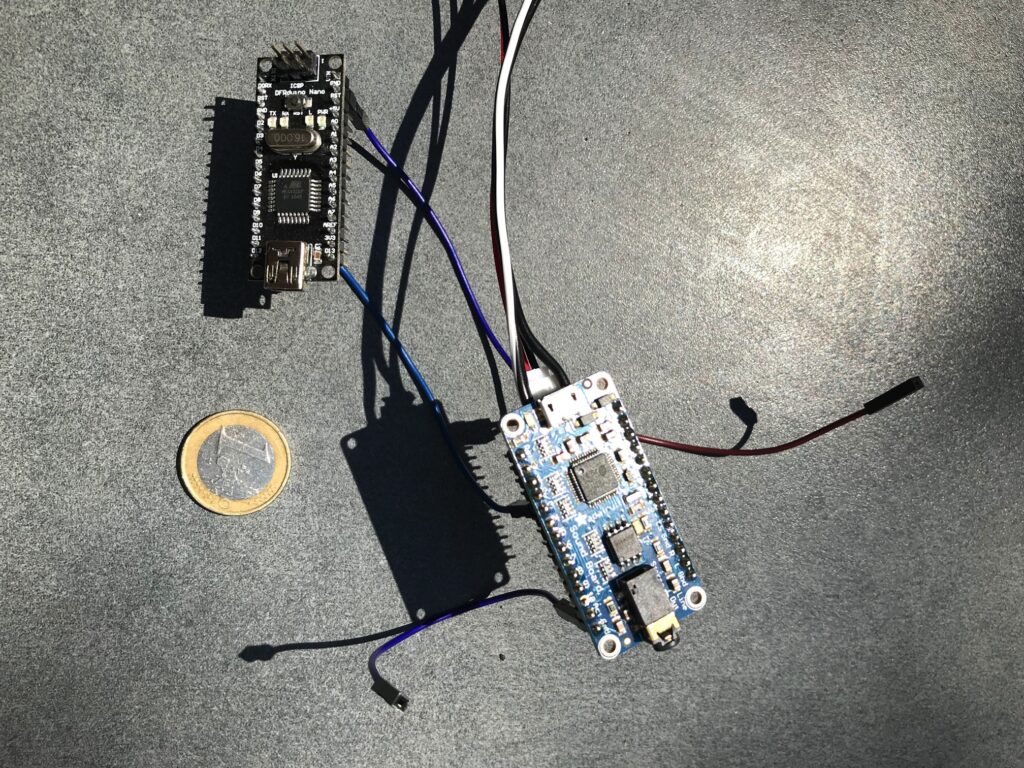
Wie gestern auf Twitter angekündigt, ging es weiter mit der Verkabelung meines neuen minibot. Und das konnte endlich abgeschlossen werden! Der aktuelle Stand soll natürlich wie immer hier dokumentiert werden. Und warum mich ein Nicht-Rastermaß sehr genervt hat, sieht man auch später. Aber der Reihe nach.
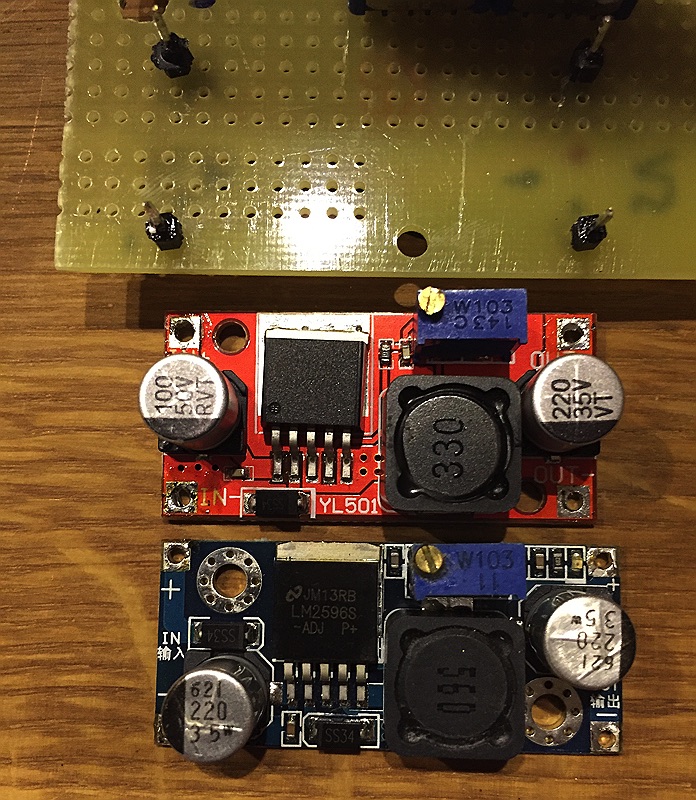
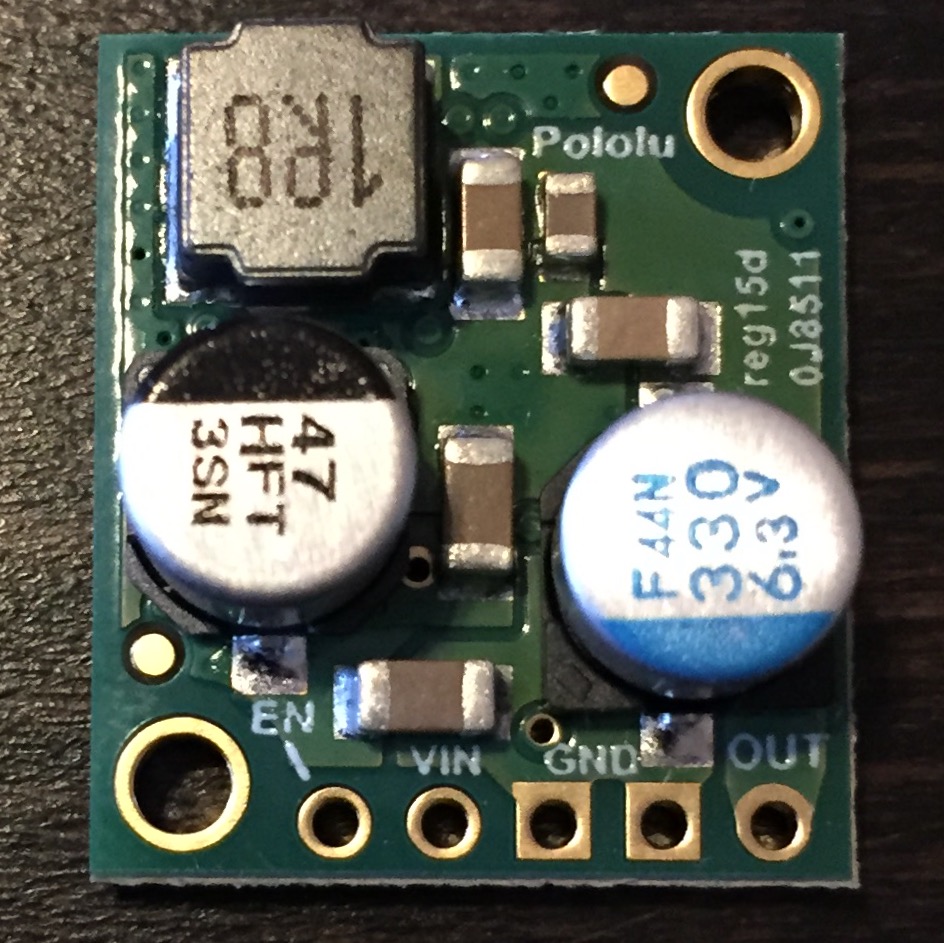
Als erstes wurde ein LiPo-Akku hinzugefügt und mit einem StepDown-Regler von Pololu verbunden. Übergangsweise wurde hier noch ein „kleiner“ 5 Ampere-reger verwendet.
Immer schon einmal wollte ich per Apple Remote einen Arduino steuern. Und nun endlich habe ich mir die Zeit dazu genommen. Nach wirklich vielen Seiten im Netz habe ich mir die verschiedenen Teile zusammengesucht und ein Beispiel gebaut, was sehr simpel ist.
Es beruht auf der Bibliothek IRremote für den Arduino, die es bei GitHub frei zum Download gibt.
Alle Beispiele, die ich im Netz fand, konnten nicht mit den aktuellen Apple Remotes umgehen, aber letztendlich war es kein Problem diese mit den Beispielen im Code „auszulesen“ und in eigenen Code zu integrieren.
Meinen Sourcecode gibt es hier zum Download. Und das beste: Er funktioniert mit mit den beiden letzten, aktuellen Apple Remotes (aus Aluminium):
Die unterschiedlichen Apple Remote Fernbedienungen (links die neuere)
Eine Datenübertragung per Bluetooth wurde in diesem Beitrag beschrieben. Hier soll nun erläutert werden, wie einzelne Pins mit dem Arduino per Bluetooth mit einer iOS-App auf dem iPhone geschaltet werden können. Die Pins können übrigens auch in der iOS-App ausgelesen werden, was hier noch nicht gezeigt wird, aber hier erklärt wird.
Dieser Aufbau eignet sich grundsätzlich zum Schalten eines 230V Relais (Verbraucher) mit dem Arduino – hier sind aber die gängigen Bestimmungen zu beachten und es besteht ein Risiko des tödlichen Stromschlags! Der Nachbau erfolgt daher in jedem Fall auf eigene Gefahr!
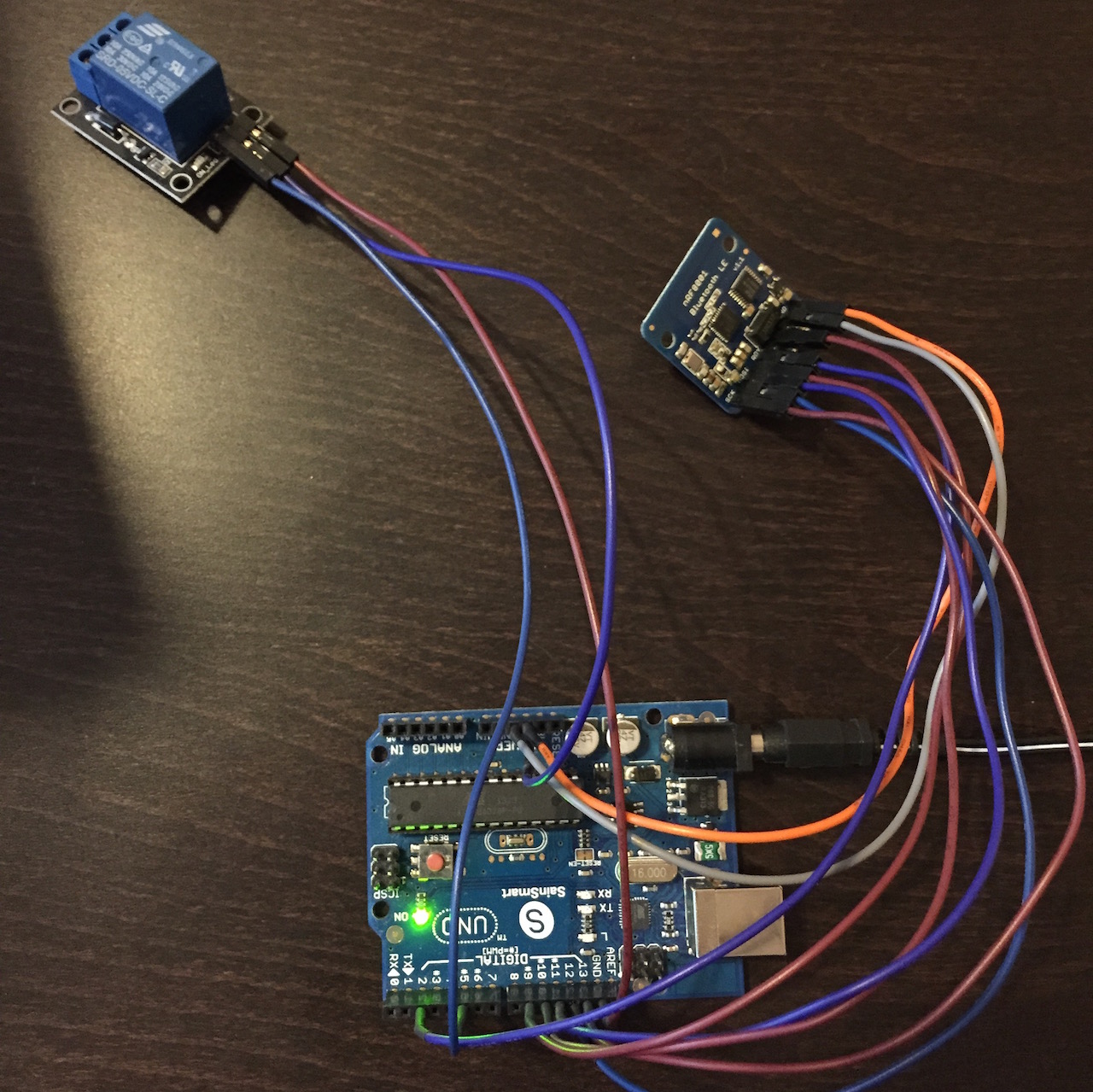
Hier der Aufbau der Schaltung. Für das Relais kann jeder Ausgangs-Pin des Arduino verwendet werden. Die Verkabelung des Bluetooth-Moduls ist hier beschrieben.
Die verkabelten Module (Arduino, Bluetooth und Relais)
Schön wäre es, wenn man einen Roboter per (iOS) App fernsteuern könnte. Was liegt da näher, als dieses per Bluetooth LE zu tun. Dieses hat bei iOS den Vorteil, dass es nicht irgendwie kompliziert von Apple zertifiziert werden muss.
Ein sehr günstiges Bluetooth LE-Modul gibt es von Adafruit für derzeit 19 € (zum Beispiel bei EXP TECH erhältlich).
Wie bereits zuvor erläutert, soll der von der Graupner-Fernbedienung gesteuerte Arduino mit dem Raspberry Pi per I2C kommunizieren. Der hier beschriebene Lösungsansatz ist übrigens vollständig hier herunter ladbar:
/recopter/arduino/graupner1/recopter/recopter.ino für den Arduino
/recopter/raspberry_pi/i2c/recopter.py für den Raspberry Pi
Wie man an der Dateiendung .py erkennt, handelt es sich bei dem Code für den RasPi um die Programmiersprache Python. Aber der Reihe nach.