Gestern wurden endlich die neuen Teile für den Omnibot getestet. Hier ein paar Eindrücke und ein kurzes Video.
Als erstes wurde das Code-Beisspiel aus der Adafruit-Library am MacBook getestet.
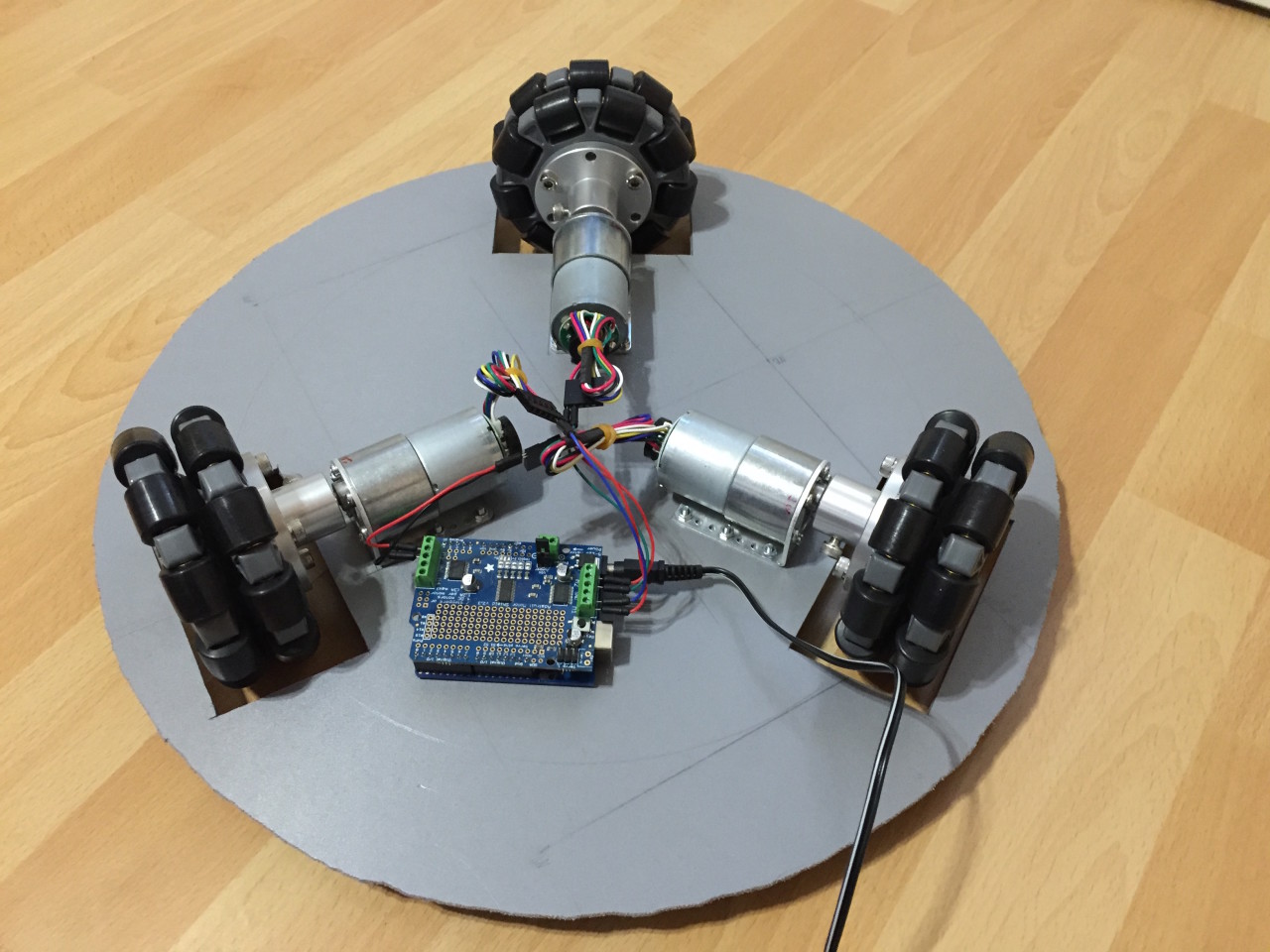
Danach wurde der Arduino mit dem Motor Shield auf dem Prototypen montiert.
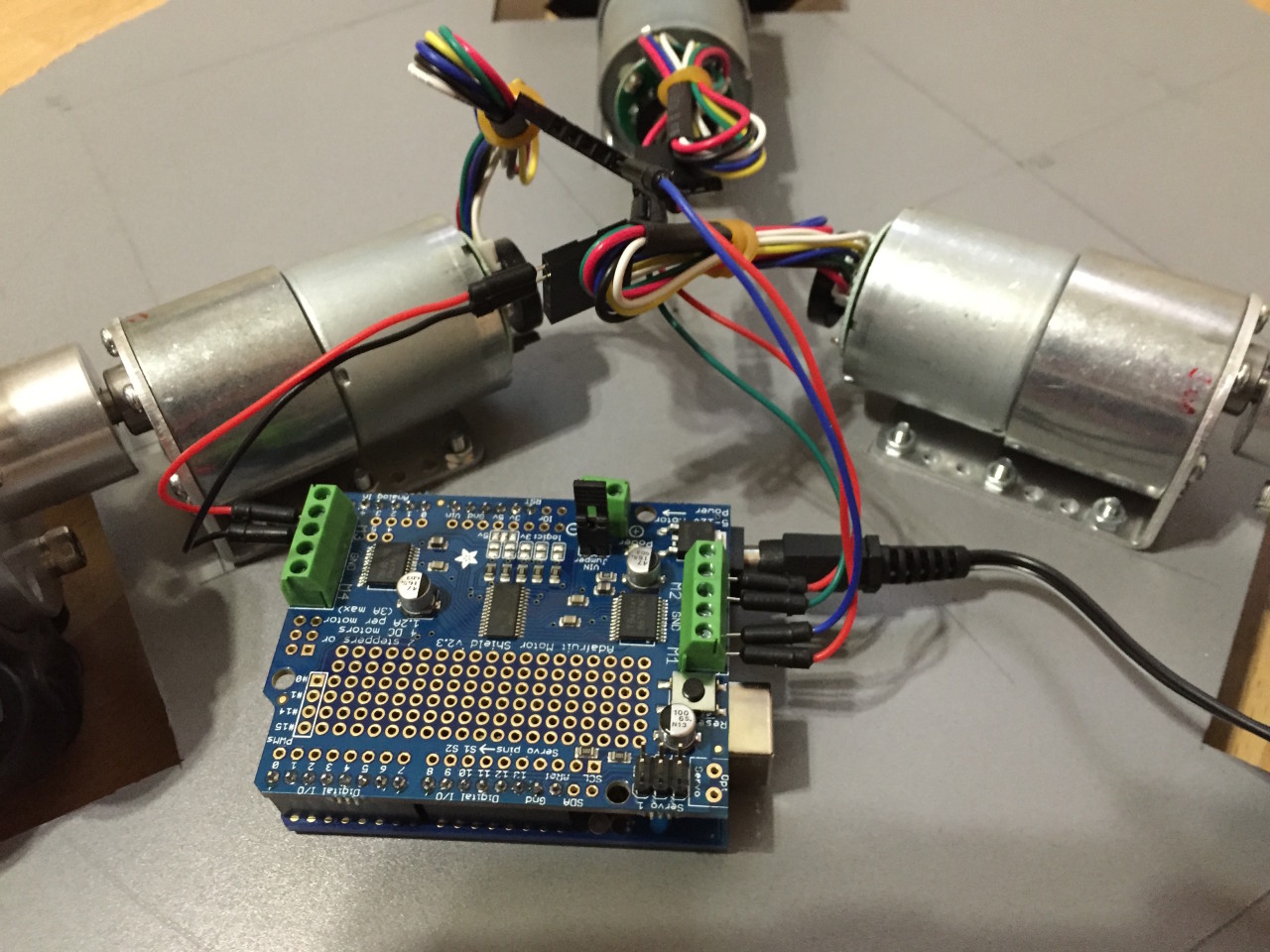
Und hier das Ganze noch einmal etwas näher fotografiert. Hier sieht man auch, dass die Kabel vom Board zu den Motoren zum Testen nur gesteckt sind.
Und hier das Video mit dem ersten Fahrversuch. Die Stromversorgung erfolgt hier noch über ein kleines Steckernetzteil (12 Volt, 1 Ampere).