Lange keine Neuigkeiten mehr… Aber es ist dennoch etwas passiert: Der Logik-Teil wurde erfolgreich programmiert. Der Roboter weicht nun Hindernissen automatisch aus.
Die Überlegungen dazu waren erst gar nicht so leicht, im Ergebnis dann aber absolout logisch:

Wenn der Roboter dann mal endlich eine Zeit lang fährt, kommt der Kühlkörper der Motor-Ansteuerungselektronik schon ganz schön ins Schwitzen:

Und auch die Schrittmotoren arbeiten sich ordentlich warm – 6 kg Laptop sind eben "nicht ohne":

Was gibt es sonst noch so neues? Für die CMUCAM2 wurde eine Steck-Halterung entwickelt und die Kamera ebenfalls montiert.


Vorteil: Zu Transportzwecken kann die Kamera mit Halter so leicht abgenommen werden. In dieser Bildreihe ist die "Montage" der einzelnen Roboter-Bestandteile gut zu erkennen:





Zusätzlich wurde die Elektronik um einen NE555 erweitert, der so etwas wie einen Heartbeat abgibt:

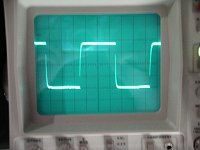
Diesen prüft das (überarbeitete) Programm nun beim Start, so dass es nicht nur feststellt, ob die Schaltung überhaupt am USB-Port angeschlossen ist, sondern auch noch, ob der Roboter auch eingeschaltet ist (12 V-Akku Stromversorgung).
Als letztes gab es in der Zwischenzeit testweise einen ersten Wurf einer neuen Programmoberfläche (GUI), die auch aus der Ferne eine verbesserte Lesbarkeit ergeben soll – schließlich geht der Roboter so langsam in seiner Umgebung "auf Tour". Vielleicht wird die neue GUI auch optional einschaltbar sein. Mal sehen…

Es steht ohnehin ein komplettes Programm-Redesign an, da die derzeitige Motoransteuerung per Timer nicht sehr leistungsfähig ist. Soll heißen: Werden die Sensoren oft per Timer abgefragt (alle 20 ms) , kommt der Motor-Timer (jede ms) nicht mehr hinterher. Somit wird es in naher Zukunft wohl auf Multithreading hinauslaufen…