Wie sich beim letzten Fahrversuch zeigte, „plant“ der Roboter seine Ausweichmanöver noch nach den altern Laserscannern, die alle nicht mehr als 180° auflösten. Nach ersten Untersuchungen des obstacleCheckThread zeigte sich, dass hier ein wenig mehr zu aktualisieren war. Ein Grund dafür war, dass der jetztige Laserscanner einen Bereich von 240° abdeckt. Damit sieht er aber auch „nach hinten“. Beim Prüfen, ob ein Hindernis vor dem Roboter liegt, soll er natürlich die Objekte hinter sich ignorieren.
Da der bisherige obstacleCheckThread offenbar auch noch ein paar Fehler enthielt, wurde er vollständig neu entwickelt. Folgende hier farbing markierten Hindernis-Situationen galt zu prüfen:
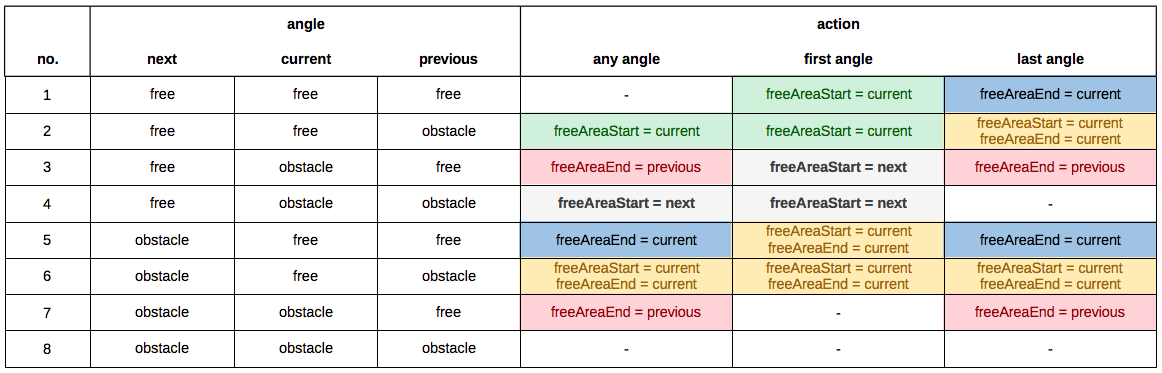
Nach einer weiteren Analyse konnten die zu prüfenden Punkte optmiert werden. Die hier grau dargestellten waren nicht mehr nötigt:

Nach vielen Tests und vielen Versuchen sieht das Ganze nun so aus (im Simulationsmodus):
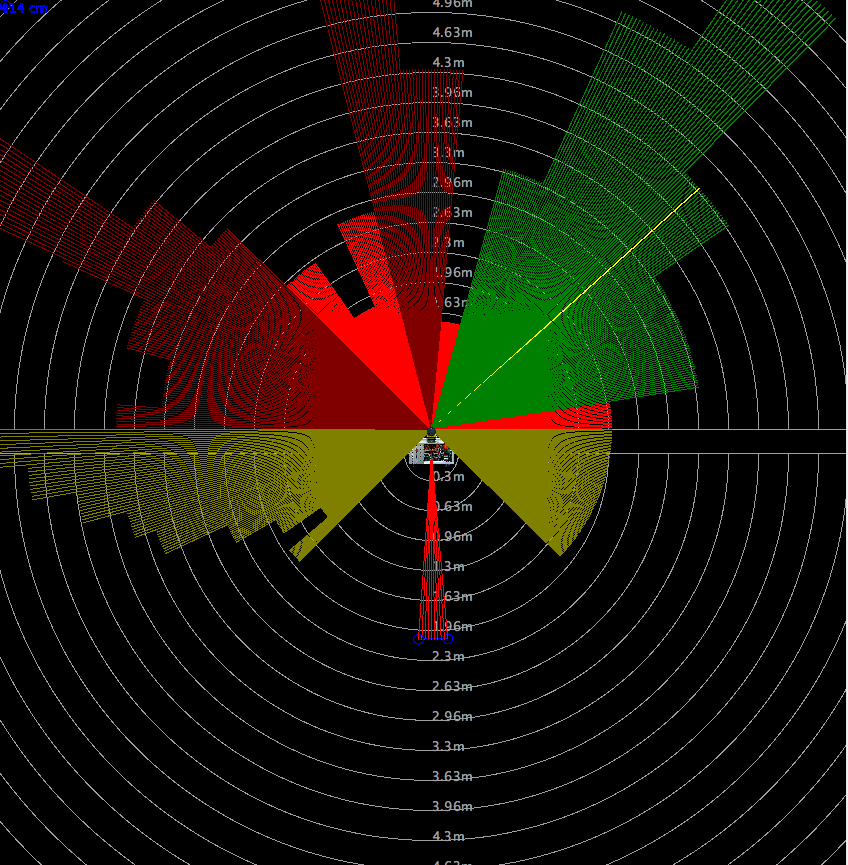
Die gelben Linien stellen hier die Bereiche dar, der bei der Hindernisprüfung ignoriert werden sollen. Die Winkel sind natürlich per ini-Datei konfigurierbar. Als nächstest wird eine Testfahrt erfolgen, die zeigen soll, ob nun alles wie gewünscht funktioniert.
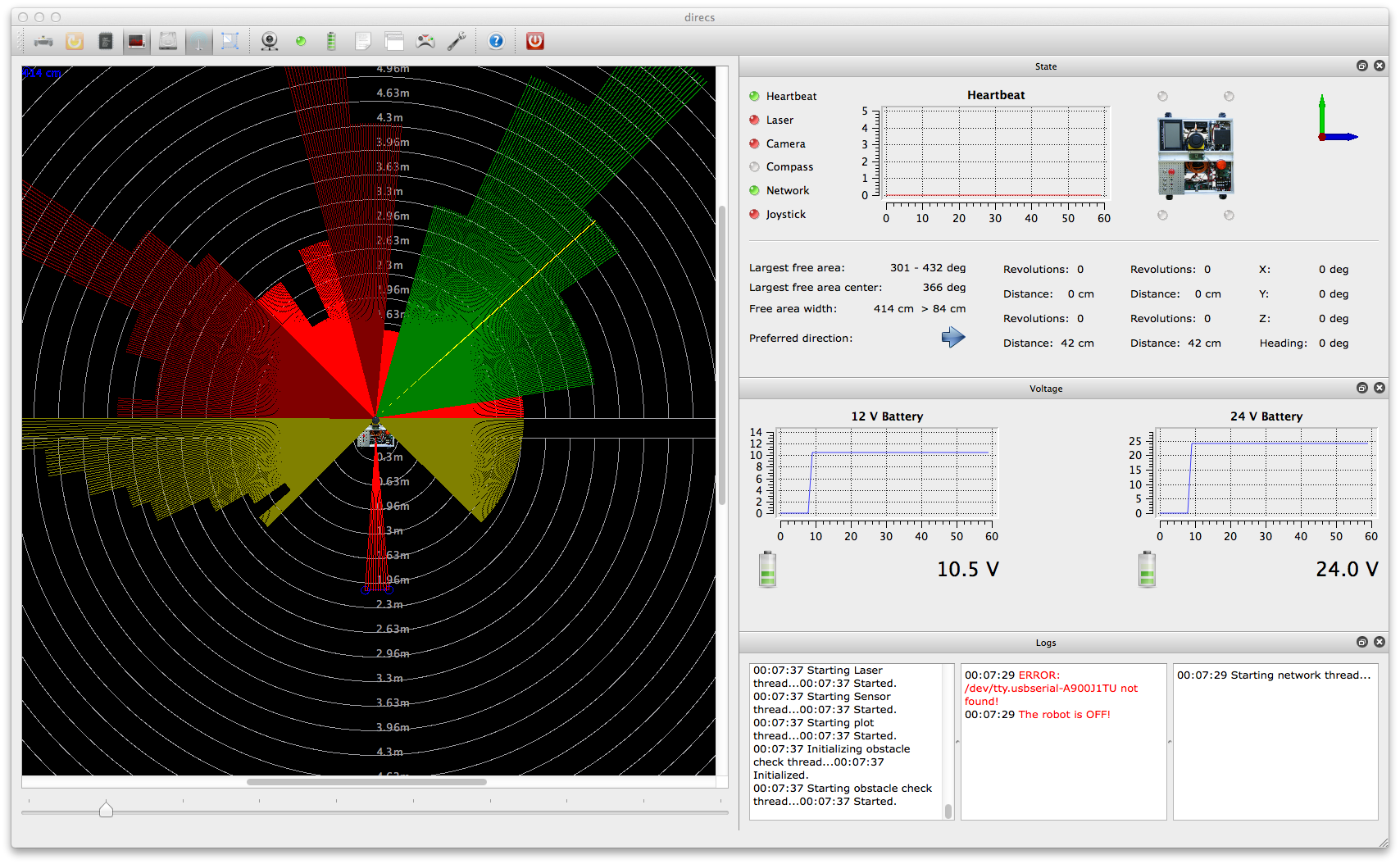
Und hier das Ganze noch einmal als vollständiger Screenshot: