Nach vielen Versuchen in der noch frischen Kinect-Welt ist nun endlich ein lauffähiger erster Wurf heraus gekommen. Aber erst noch ein paar Worte zur Vorgeschichte und als Erfahrungsbericht, falls noch jemand in diese Probleme Herausforderungen läuft.
Begonnen wurde mit der Nutzung von openFrameworks, da es hierzu ein komplexes Beispiel gab, welches auf Anhieb das Bild der Kinect (RGB und Tiefenbild) anzeigt und zusätzlich sogar eine 3D-Punktwolke und auch schon per OpenCV Hindernisse als Blobs darstellt. Vorteil dieser Lösung ist, dass sie unter Mac OS X und unter Linux einwandfrei lief. Nachteil lag (für mich) darin, dass es ein recht komplexes oder besser gesagt sehr vielfältiges Framework ist, welches zusätzlich auf diverse eigene Bibliotheken und zig eigene Datentypen zurückgreift – Nicht gerade der einfachste Einstieg, wenn man ansonsten nicht auf diesem Framework aaufbaut.
Eine weitere Herausforderung war, dass das Ganze in die "Qt-Welt" von direcs eingebettet werden muss, also z.B. mit den genialen Qt-eigenen Mitteln für Events und Eventhandler (sogenannte Signals und Slots). Hierzu gab es dann weitere Experimente, die dann auch mit dem Qt Framework ganz gut zusammen liefen. Hier gab es dann die Schwierigkeit (für mich), dass das Bild mittels OpenGL angezeigt wurde. Da aber ja der Bildinhalt später mit OpenCV weiter verarbeitet werden sollte, gestaltete sich dieses als schwierig.
Um OpenCV erst einmal weitere Erfahrungen zu sammeln, wurde das Buch Learning OpenCV (ISBN 978-0-596-51613-0) von Gary Bradski & Adrain Kaehler aus dem berühmten O’REILLY-Verlag beschafft. Für 50 EUR nicht gerade ein Schnäppchen; ein Fachbuch eben. Das Buch gefällt; leider basiert es auf der alten OpenCV Version 2.0. Seit Dezember 2010 ist Version 2.2 aktuell, bei der es so einige Änderungen gab – insbesondere haben sich die Bibliotheksnamen geändert und es wird offenbar nun viel der Datentyp Mat statt IplImage verwendet, was beim Verständnis bzw. beim Umsetzen von Code-Beispielen, die man im Netz aktuell hat (mir) oft noch schwer fällt. Erste Erfolge wurden daraufhin wie hier beschrieben dann auch zusammen mit Qt und OpenCV erzielt – hier aber noch mit der im iMac verbauten Kamera, nicht mit der Kinect.
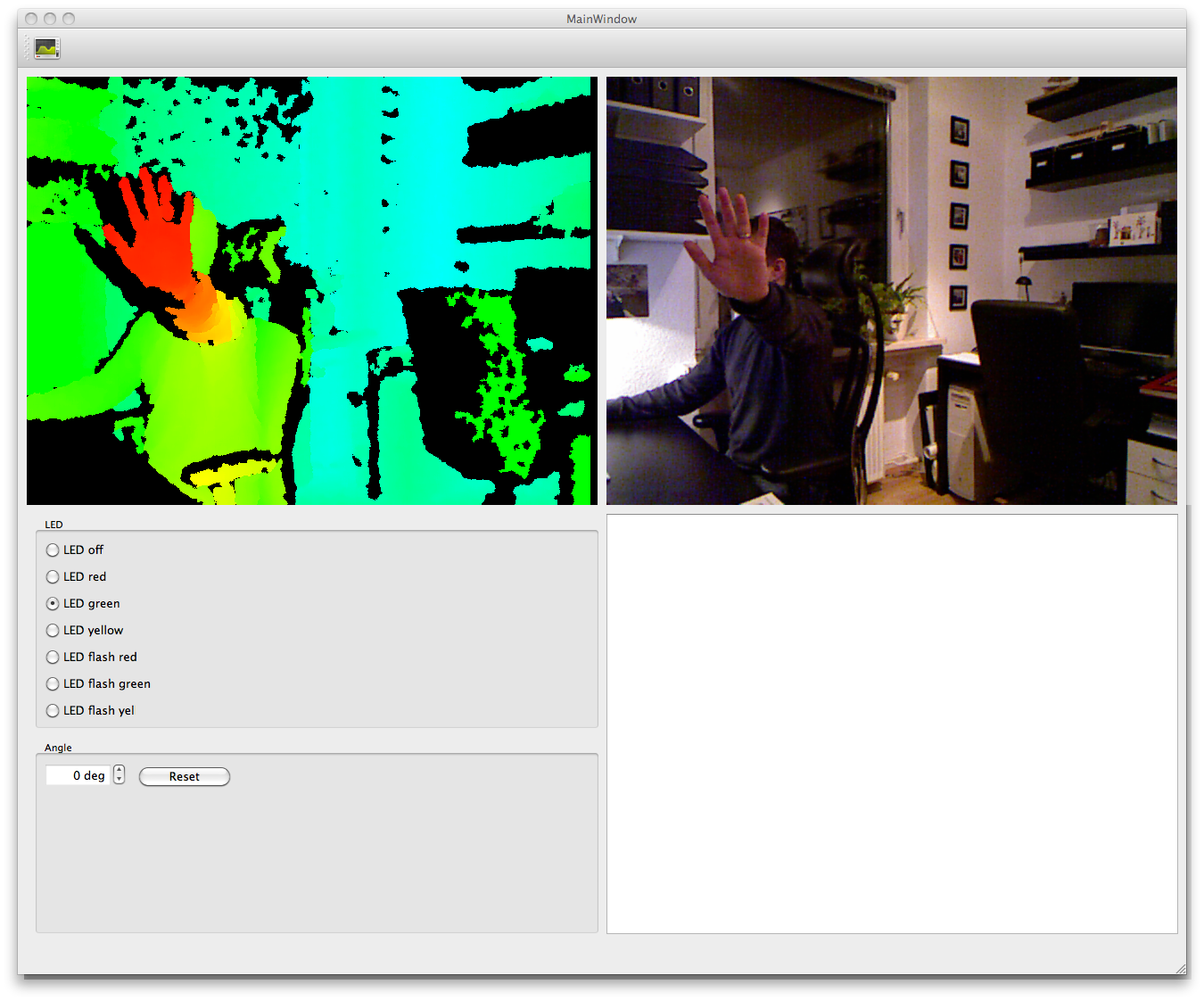
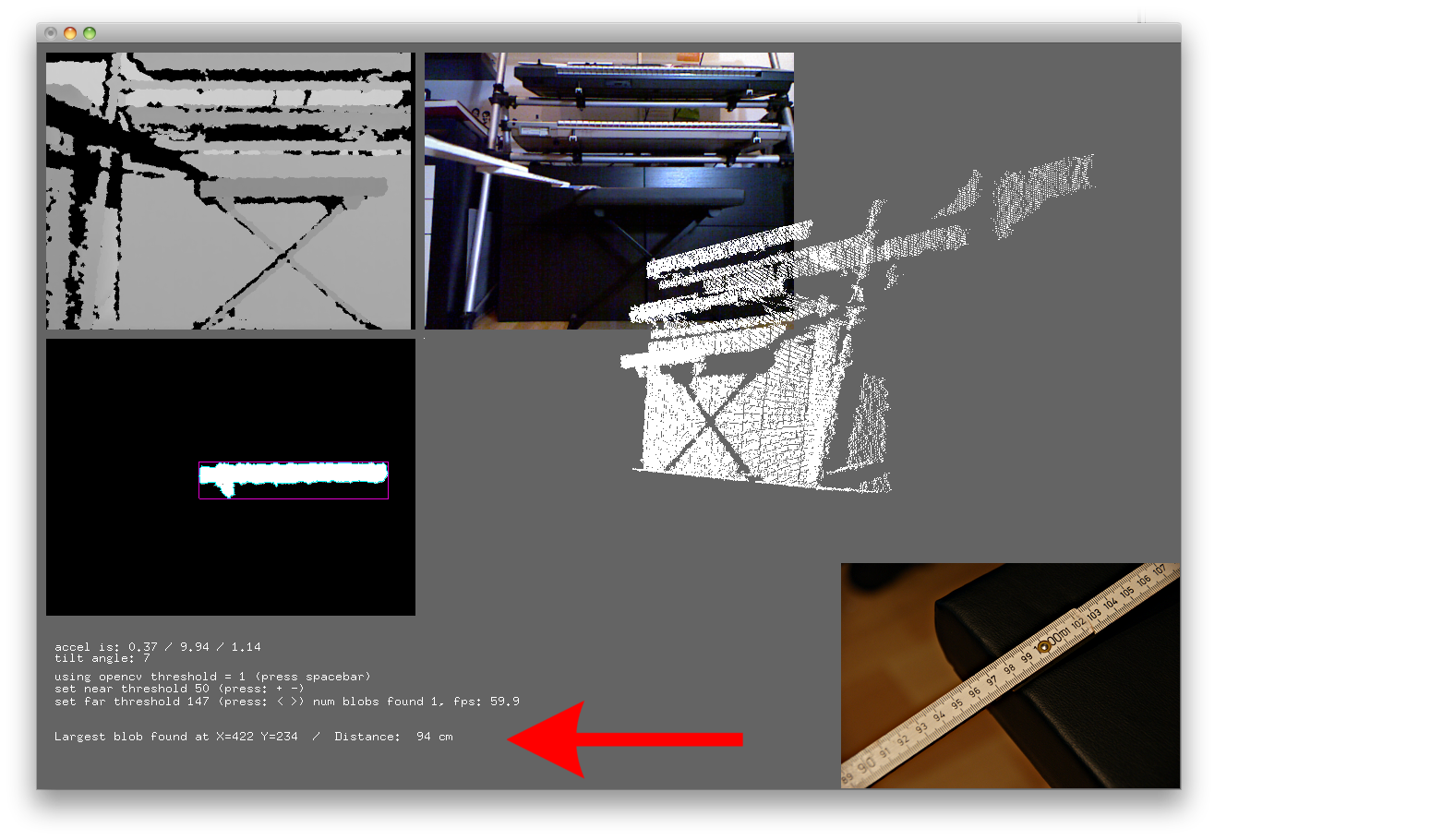
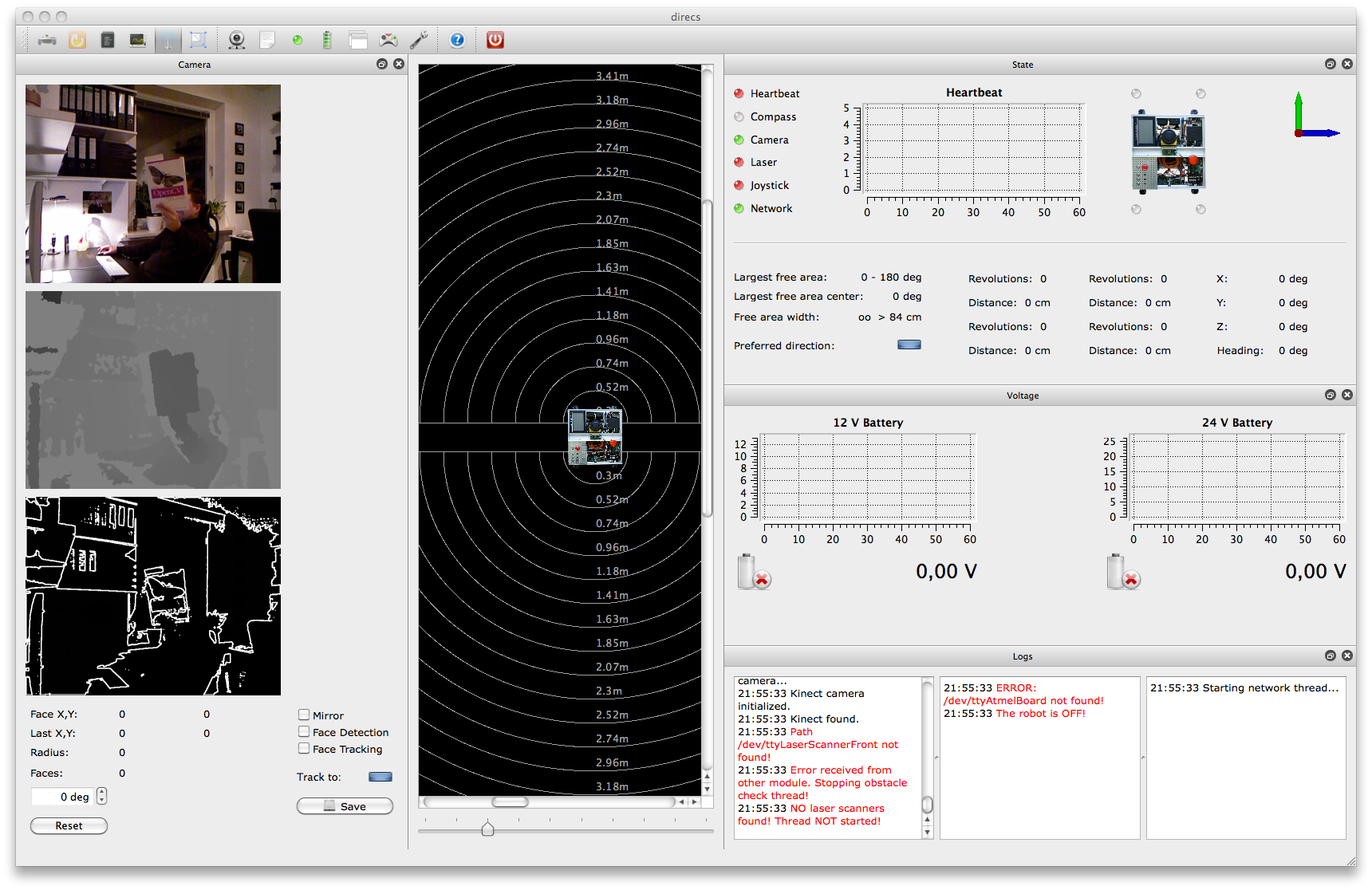
Nun galt es per libfreenect / OpenKinect an das Kamerabild der Kinect zu kommen, das ganze als Qt Thread laufen zu lassen und per OpenCV weiter zu verarbeiten. Und – tadaa – hier es das Ergebnis:
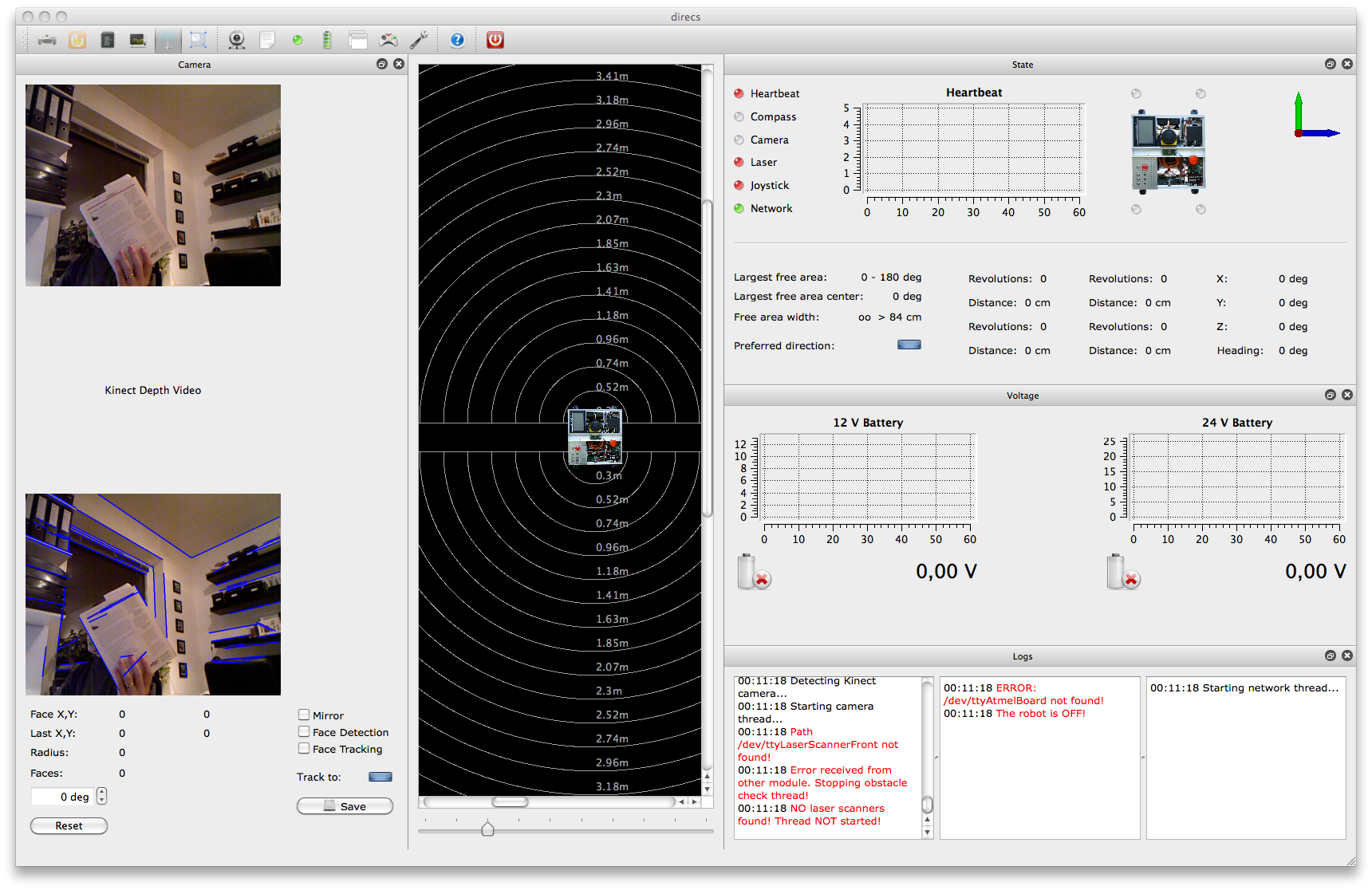
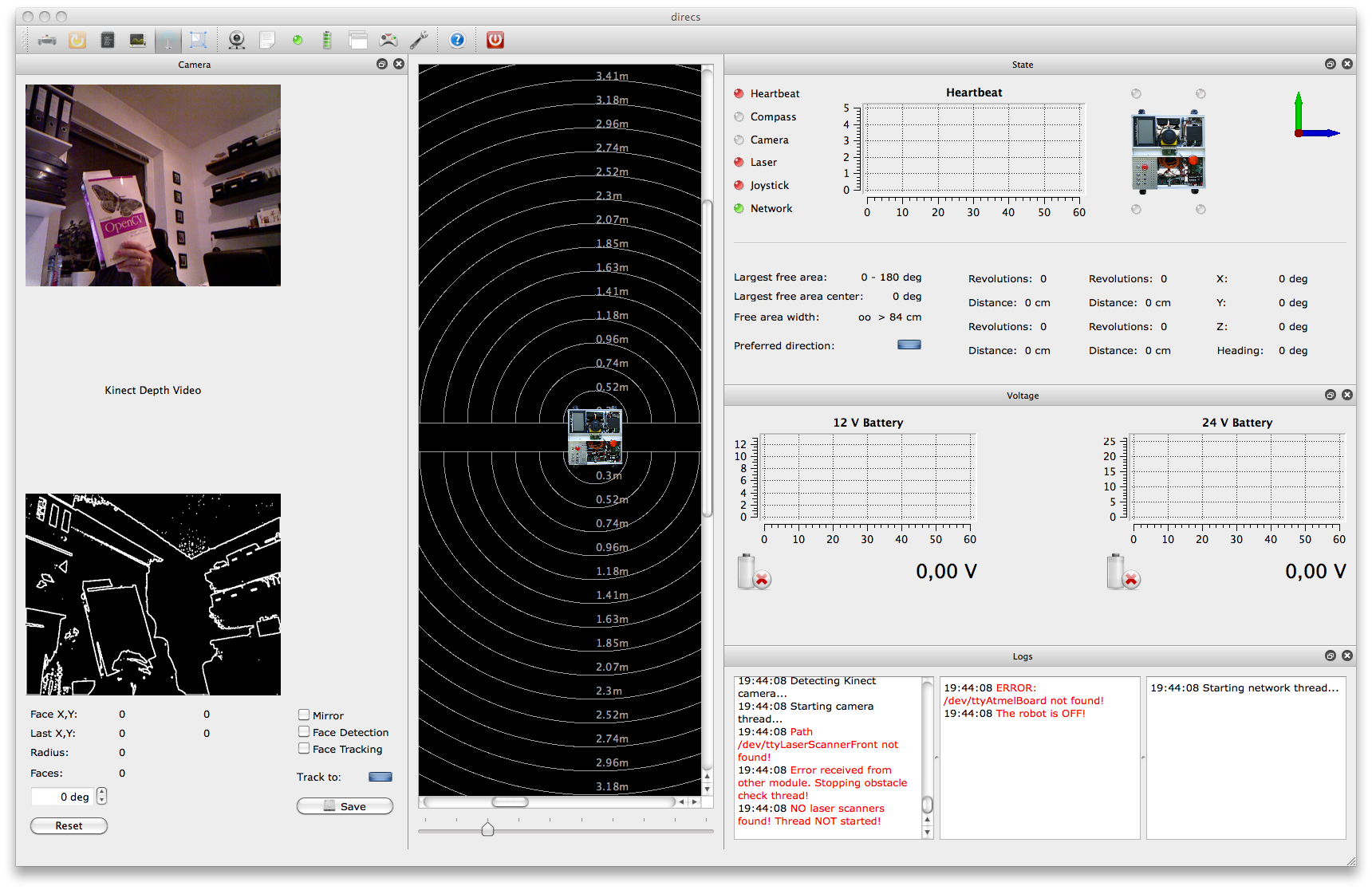
Und nach vielen Stunden Anpassen, Programmieren und Verstehen kam dann auch das Tiefenbild hinzu:
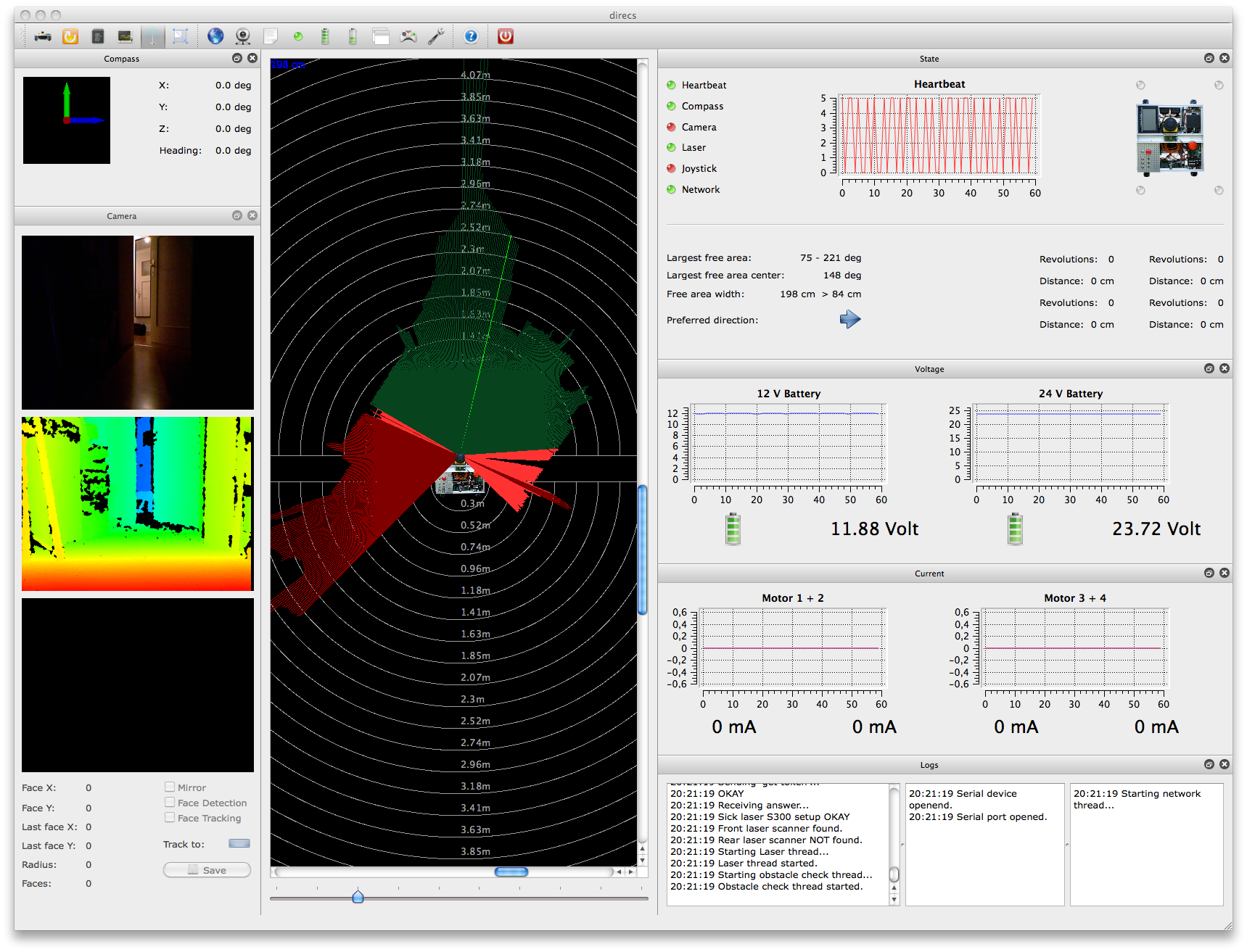
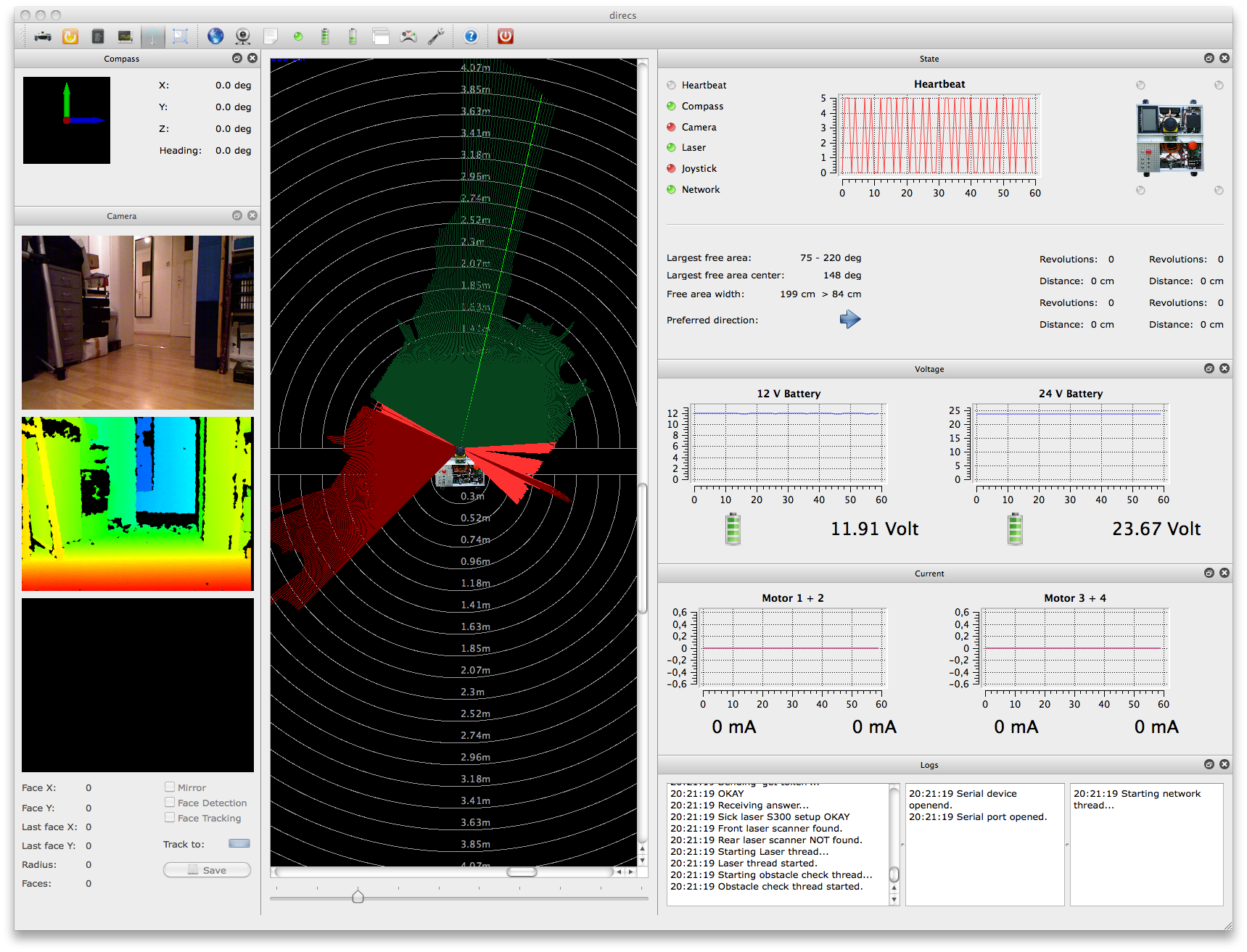
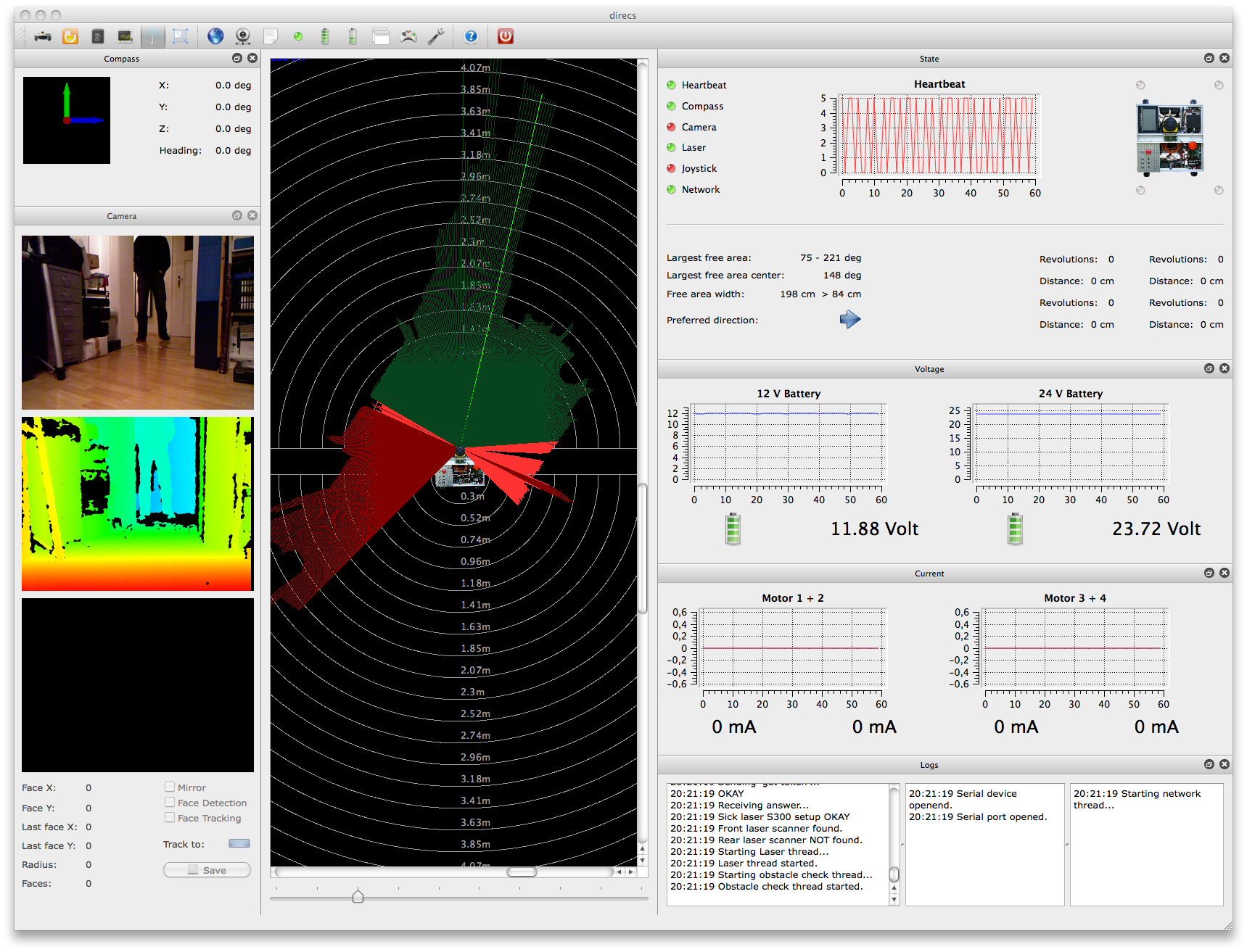
Hier noch einmal mit Roboter und Laserscanner im vollen Betrieb:
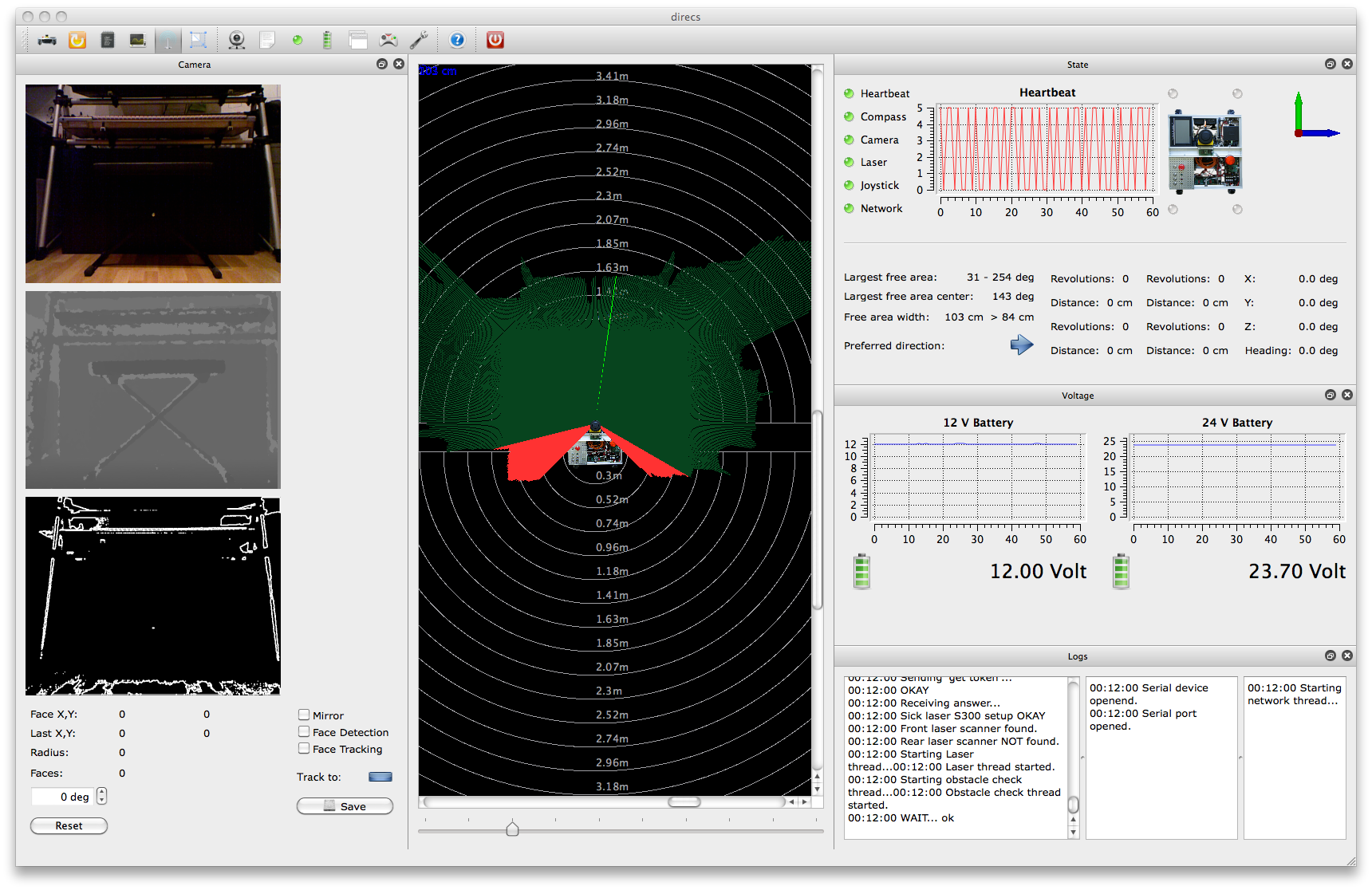
Im Gegensatz zu den meisten Beispielen im Netz wird hier übrigens das synchronous Interface / Wrapper genutzt! Verwendet wurde Qt 4.7.1 und OpenCV 2.2.0 – beides installiert unter Mac OS X via MacPorts. Der Sourcecode ist wie immer bei im online Repository bei github als Open Source verfügbar (camThread.h und camThread.cpp). Viel Spaß. Fragen? Kommentare? Gerne.