Inspiriert durch dieses Kunstprojekt, dachte ich: „Ein Gewitter imWohnzimmer? Das kann ich auch bauen!“.
Das war bereits 2019 – hier nun endlich die Fotos, die den Zusammenbau und die benötigten Einzelteile dokumentieren.
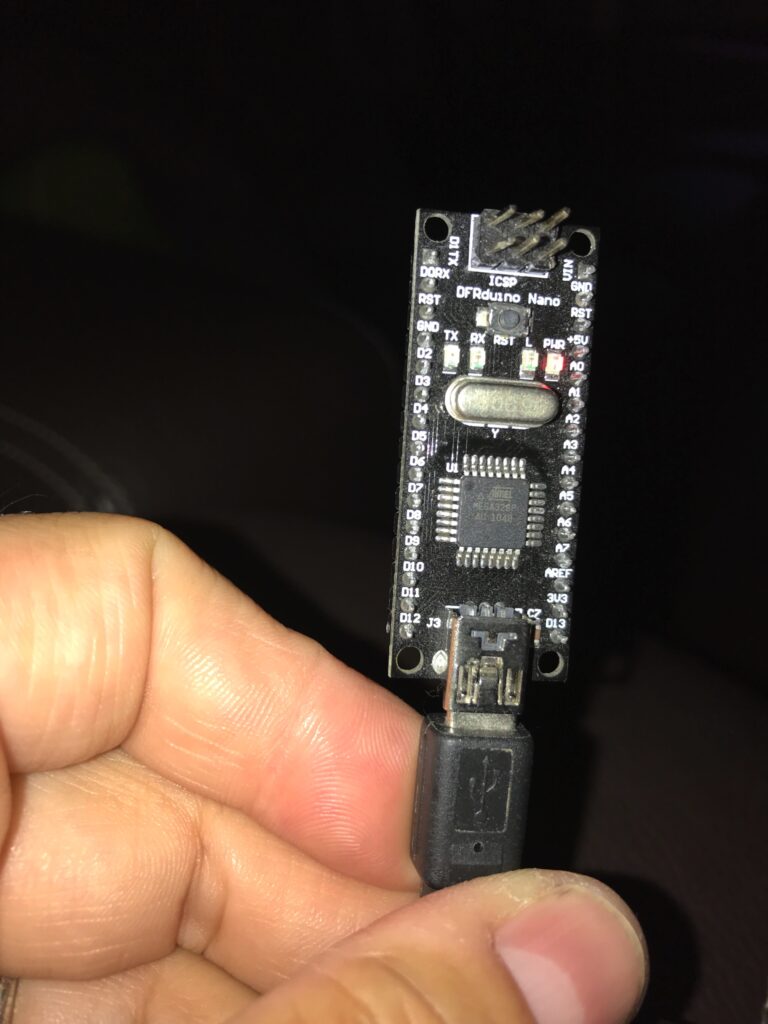
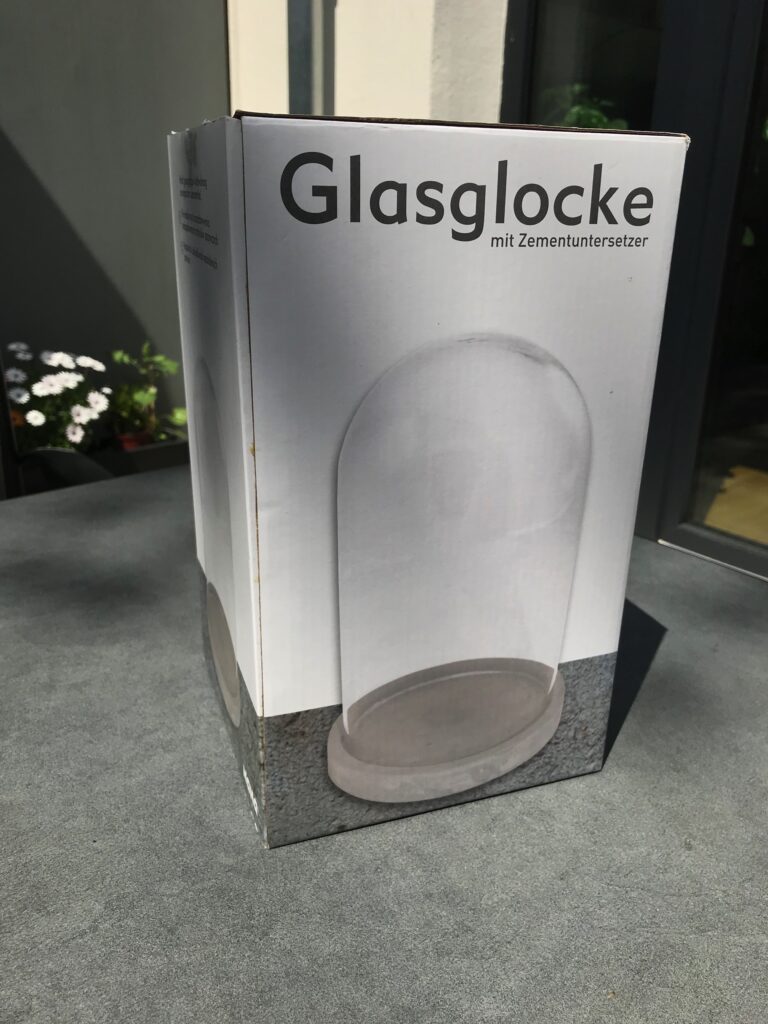
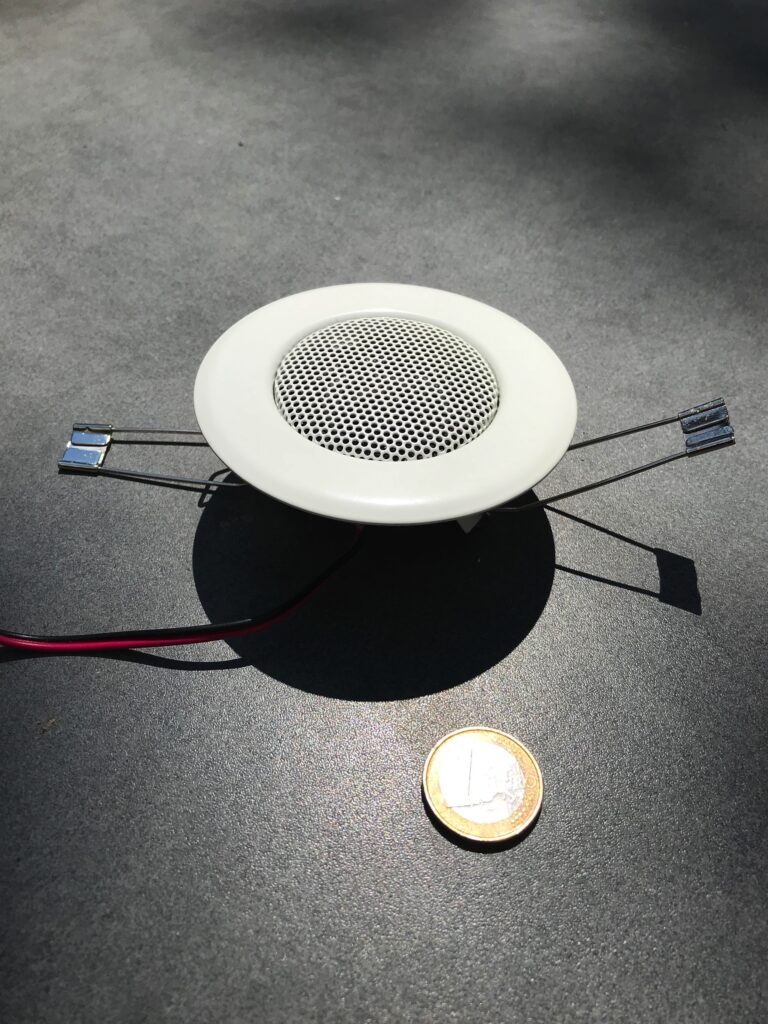
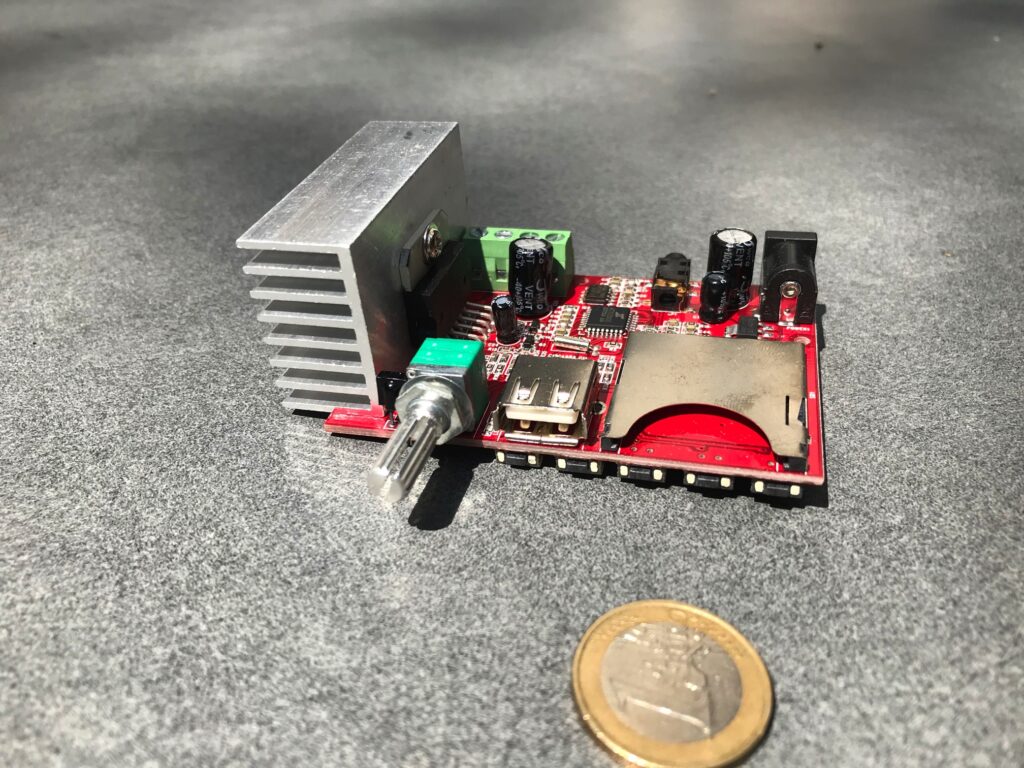
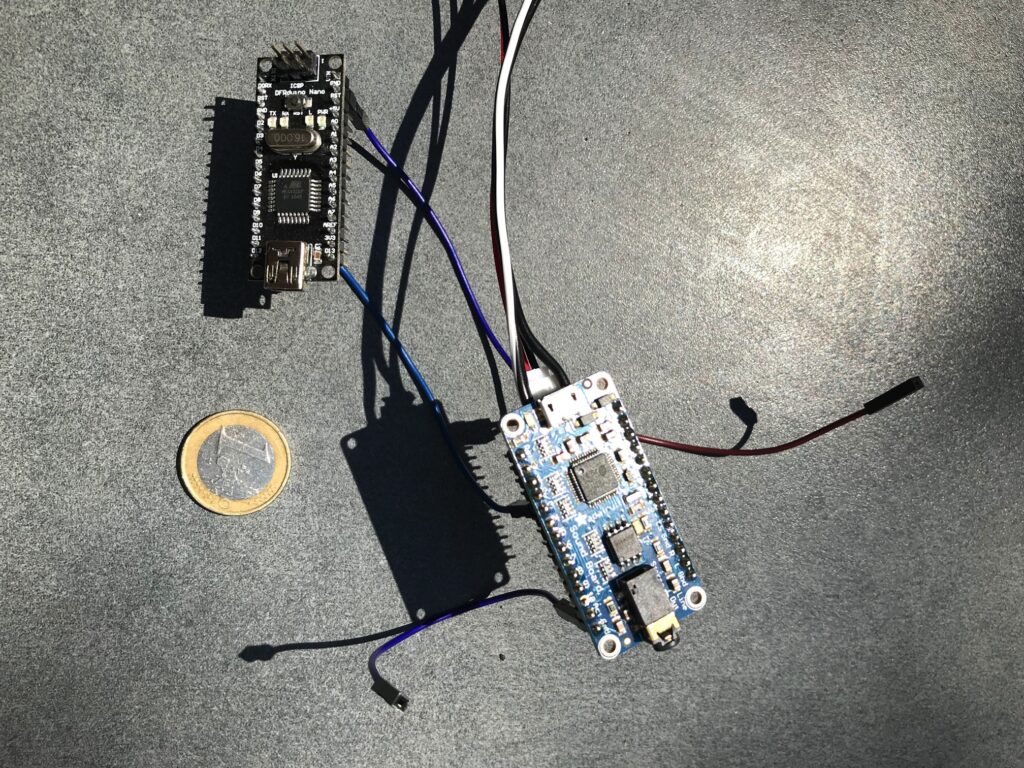
Arduino Nano bzw. DFRduino NanoSonderposten bei NANU NANAVisaton DL5 LautsprecherAdafruit PushbuttonDas Stereo-Verstärkermodul mit DAYPOWER-VM-MP3-2×15 von PollinTest des Adafruit Audio-Moduls VS1053Eine hohle MessingstangeEin Kunstkubus von Bösner
Endlich(!) hatte ich meinen ersten sinnvollen Anwendungsfall für meinen im März 2020 gekauften 3D-Drucker Creality Ender 4:
In unserem IKEA-Schrank KOMPLEMENT war eine Halterung der Kleiderstange durchgebrochen. Eine kurze Suche im Netz fand das passende Teil bei Thingiverse.
Da ich seit März kaum etwas druckte, kalibrierte ich die mitgelieferte, biegsame Platte mittels üblichem A4-Papier auf die richtige Höhe und war überrascht, dass der Drucker wie gewohnt gut druckte – dachte ich.
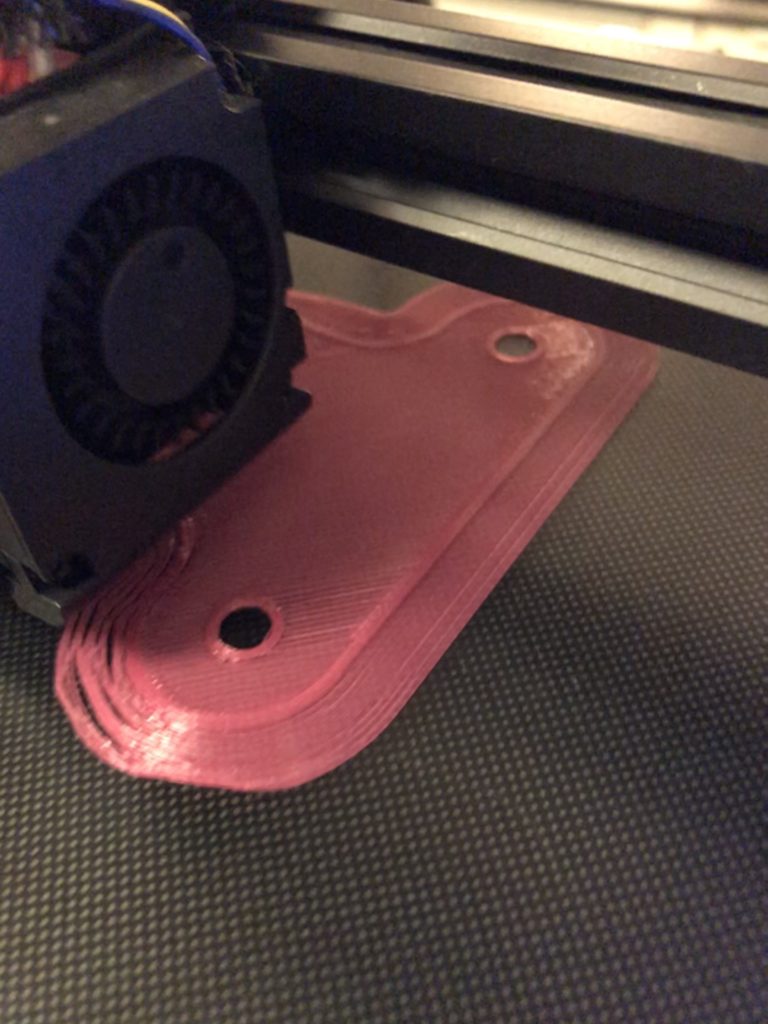
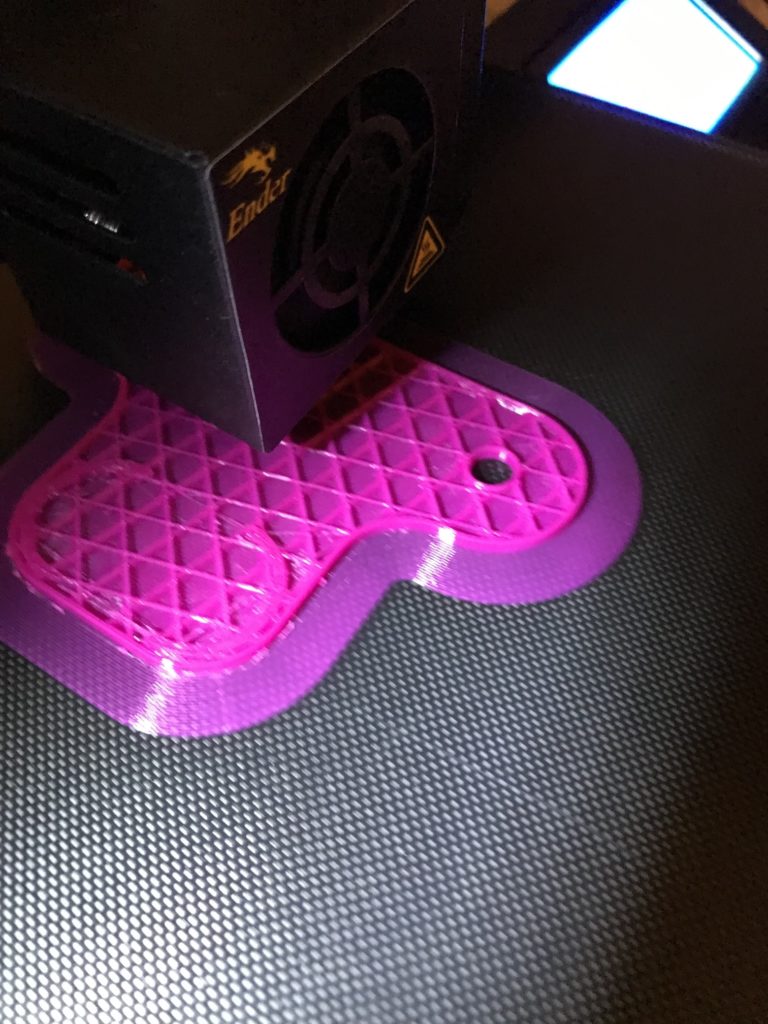
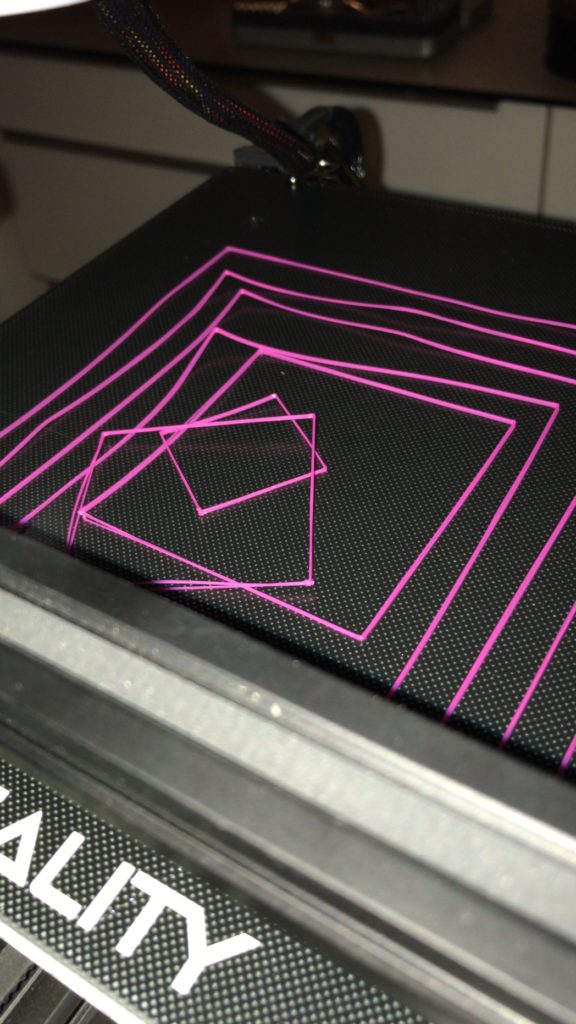
Als es dann an der Druck des eigentlichen Halters startete (er sollte ca. 1,5 Stunden dauern), begannen die Probleme.
Das Filament haftete nicht, es kräuselte sich auf der Platte, die Fäden wurden über die Platte gezogen, statt dass sie hafteten. Hier ein paar Eindrücke:
Heute möchte über meinen erfolgreichen Versuch berichten, wie ich einen Dynamixel Servo AX-12W mit einem Raspberry Pi angesteuert habe – und zwar ohne den teuren Spezial-Adapter U2D2 („USB to Dynamixel“) von ROBOTIS.
Vielleicht hat ja noch jemand das Problem, ein nagelneuer Raspberry Pi 3B+ ist da und dann das: die bisherige SD-Karte aus „altem“ RasPi in den neuen gesteckt, aber er bootet einfach nicht. Raspberry Pi 3 B+ bootet nicht – grüne LED blinkt weiterlesen
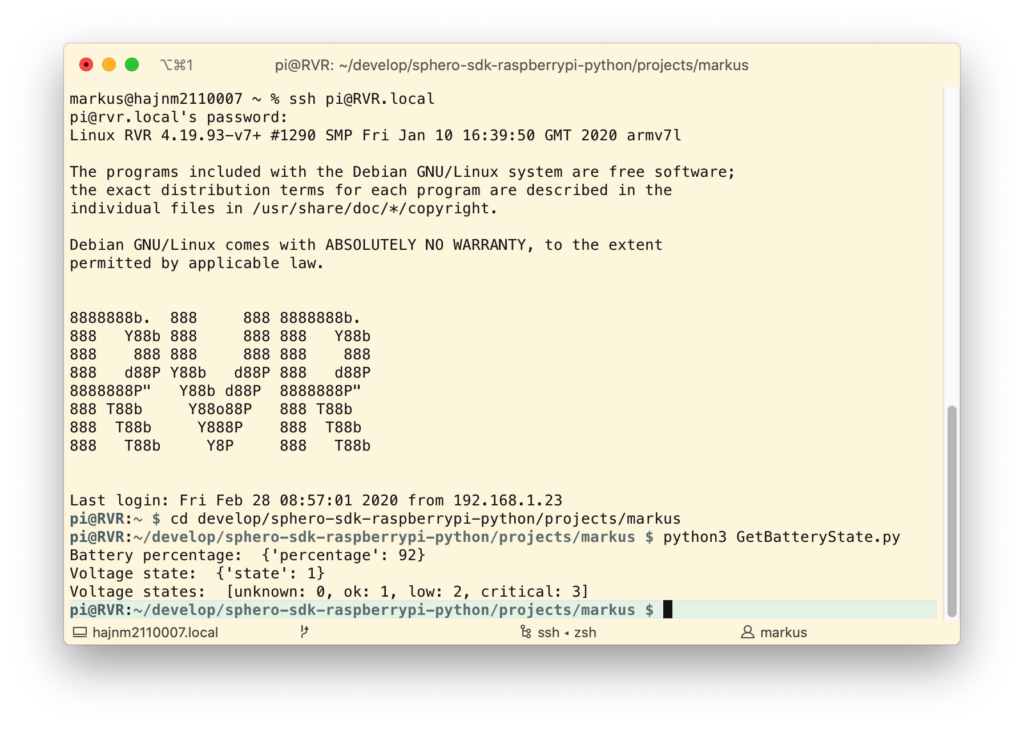
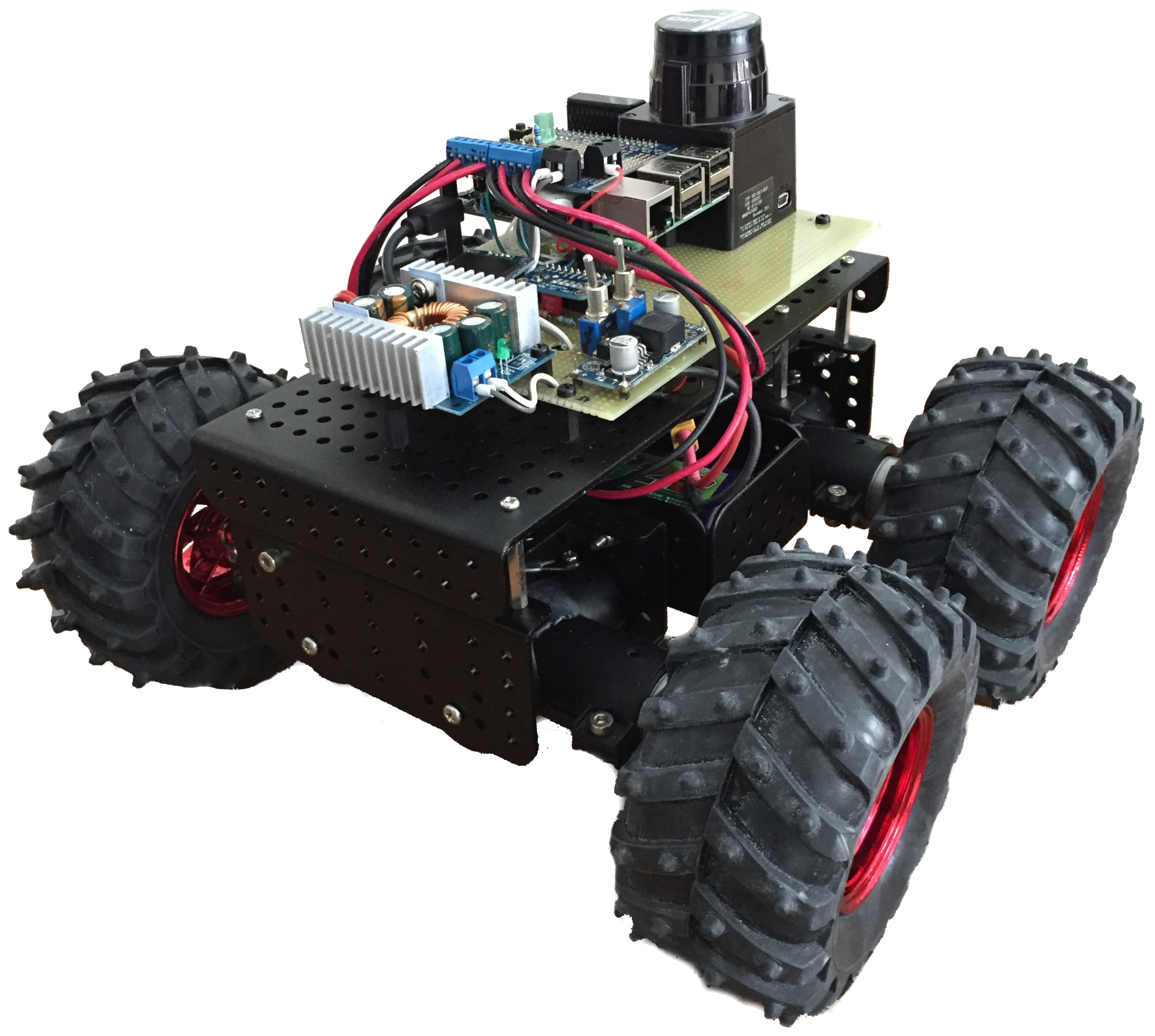
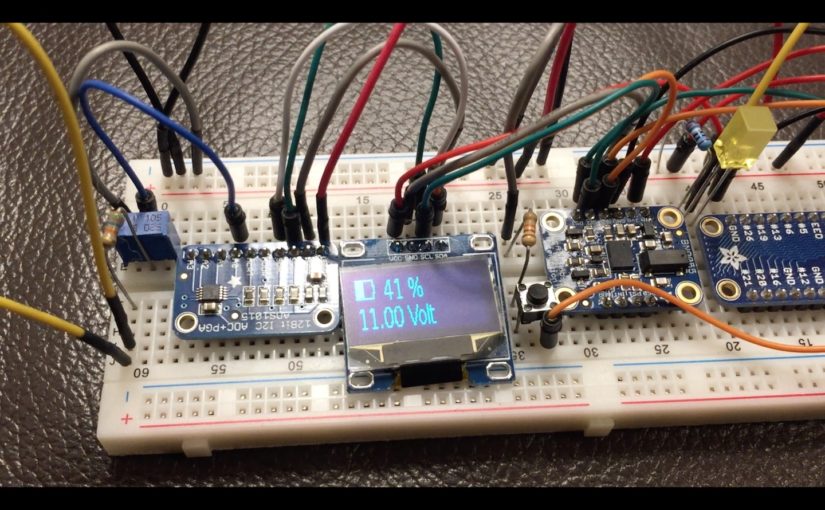
Bisher hatte ich für meinen Roboter die Akku-Überwachung mittels MCP3008 realisiert. Aber irgendwie funktionierte dieser auf einmal nicht mehr – und lässt sich wegen SPI nicht groß auf dem Raspberry Pi debuggen. Also habe ich mir eine schöne neue Lösung mit I2C gesucht. Außerdem wurde das OLED komplett neu angesteuert und die Spannung überwacht. Spannungsmessung mit AD-Wandler am Raspberry Pi – verbessert mit I2C weiterlesen