Bisher hatte ich für meinen Roboter die Akku-Überwachung mittels MCP3008 realisiert. Aber irgendwie funktionierte dieser auf einmal nicht mehr – und lässt sich wegen SPI nicht groß auf dem Raspberry Pi debuggen. Also habe ich mir eine schöne neue Lösung mit I2C gesucht. Außerdem wurde das OLED komplett neu angesteuert und die Spannung überwacht.
Ich entschied mich für den ADS1115 auf einem Breakout-Board von Adafruit – inklusive fertiger Python-Bibliothek.
Meinen Sourcecode für eine einfache Spannungsmessung an einem 3S-Lipo-Akku findet ihr hier bei github.
Da die Z-Diode im vorigen Beitrag nicht so richtig das machte, was ich wollte (längere Geschichte), entschied ich mich nun für einen simplen Spannungsteiler. Hier der Entwurf:
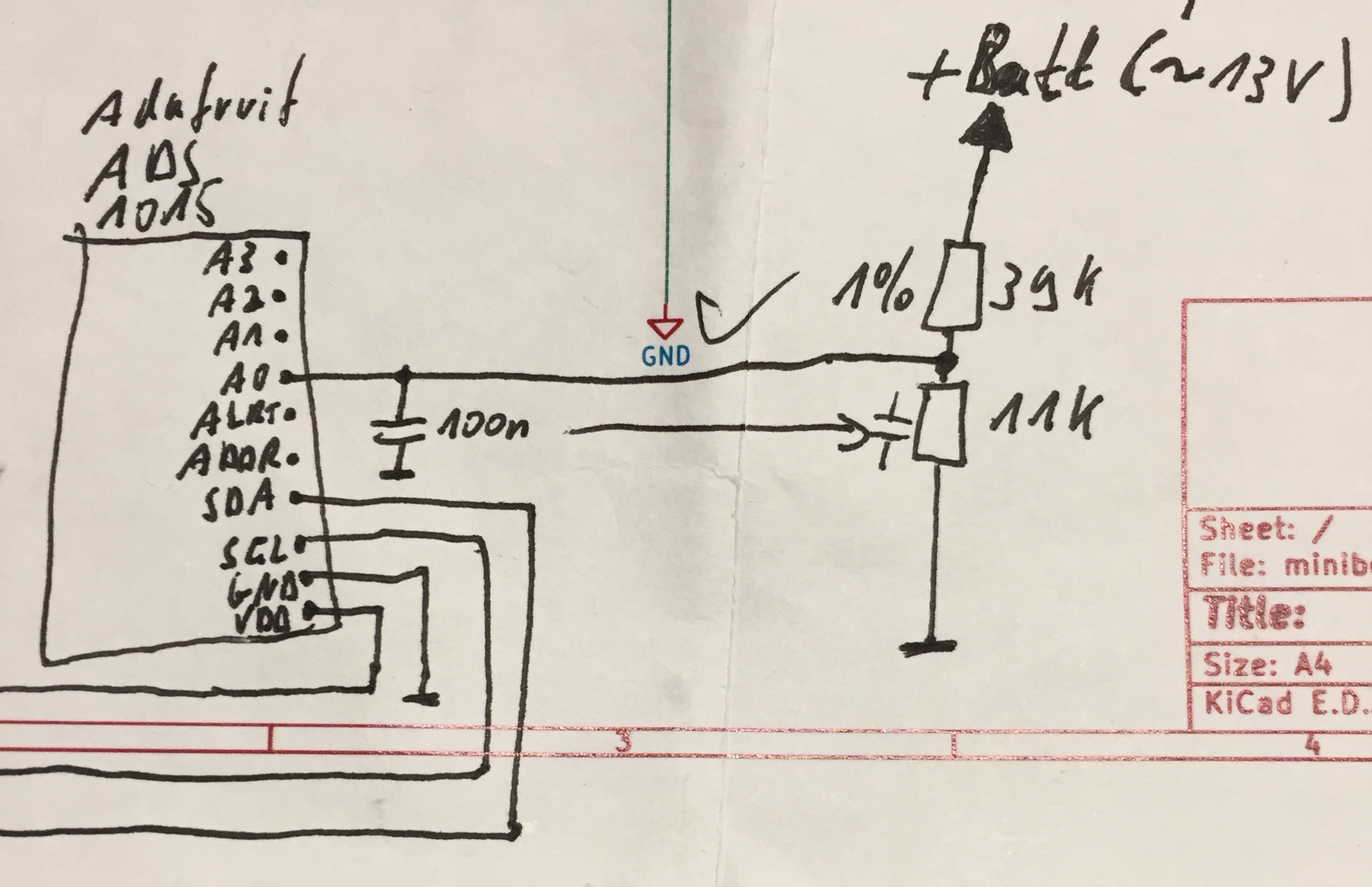
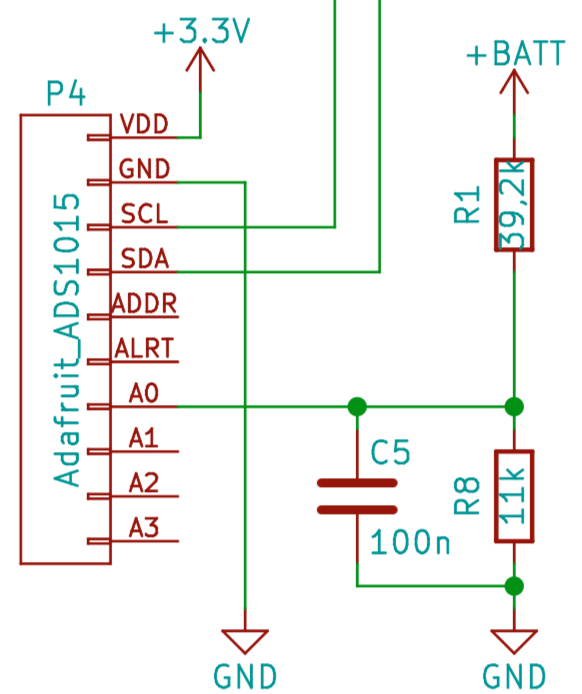
Und hier noch mal „in ordentlich“:
In meinem Podcast Robotiklabor berichtet ich bereits, dass die Messungen anscheinend eine recht hohe Ungenauigkeit hatten. Details dazu könnt ihr also auch dort nachhören.
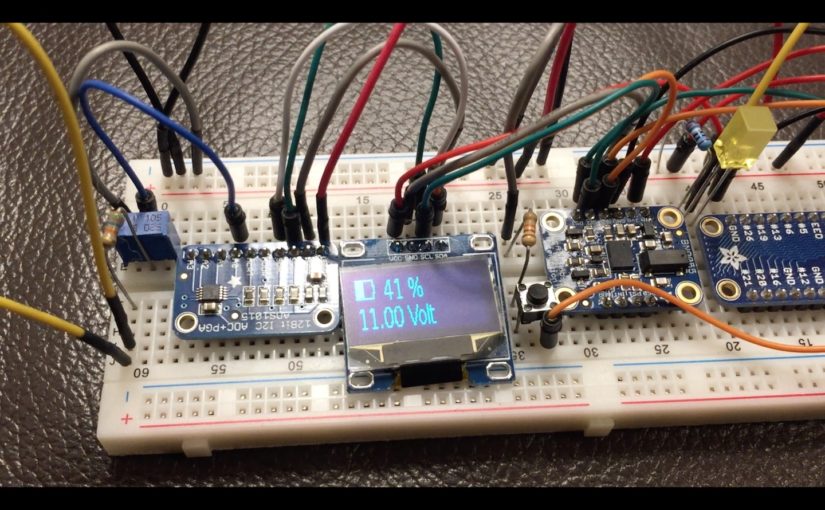
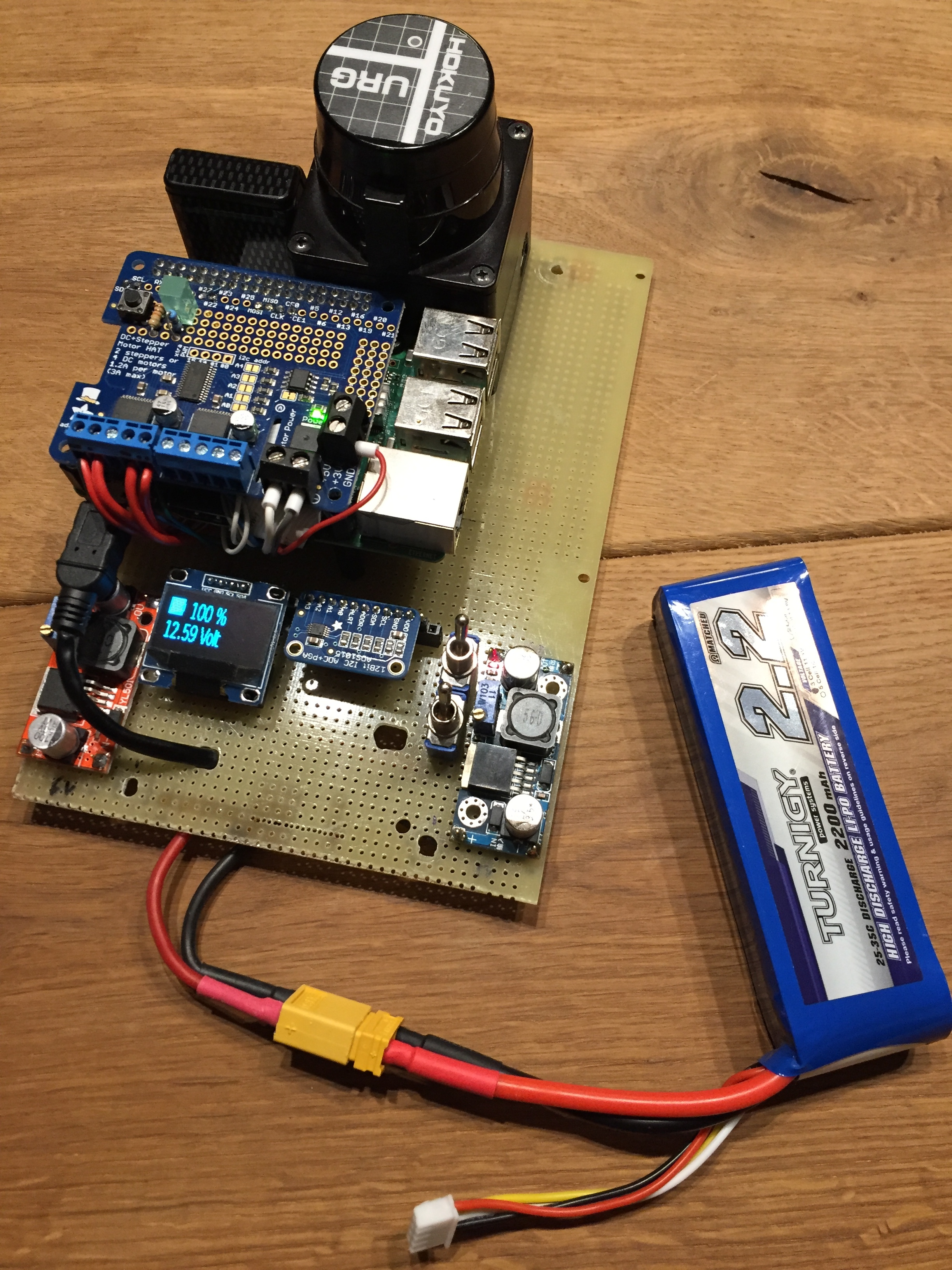
Fertig aufgebaut auf dem Roboter – mit dem OLED-Display – sieht man das ganze hier:
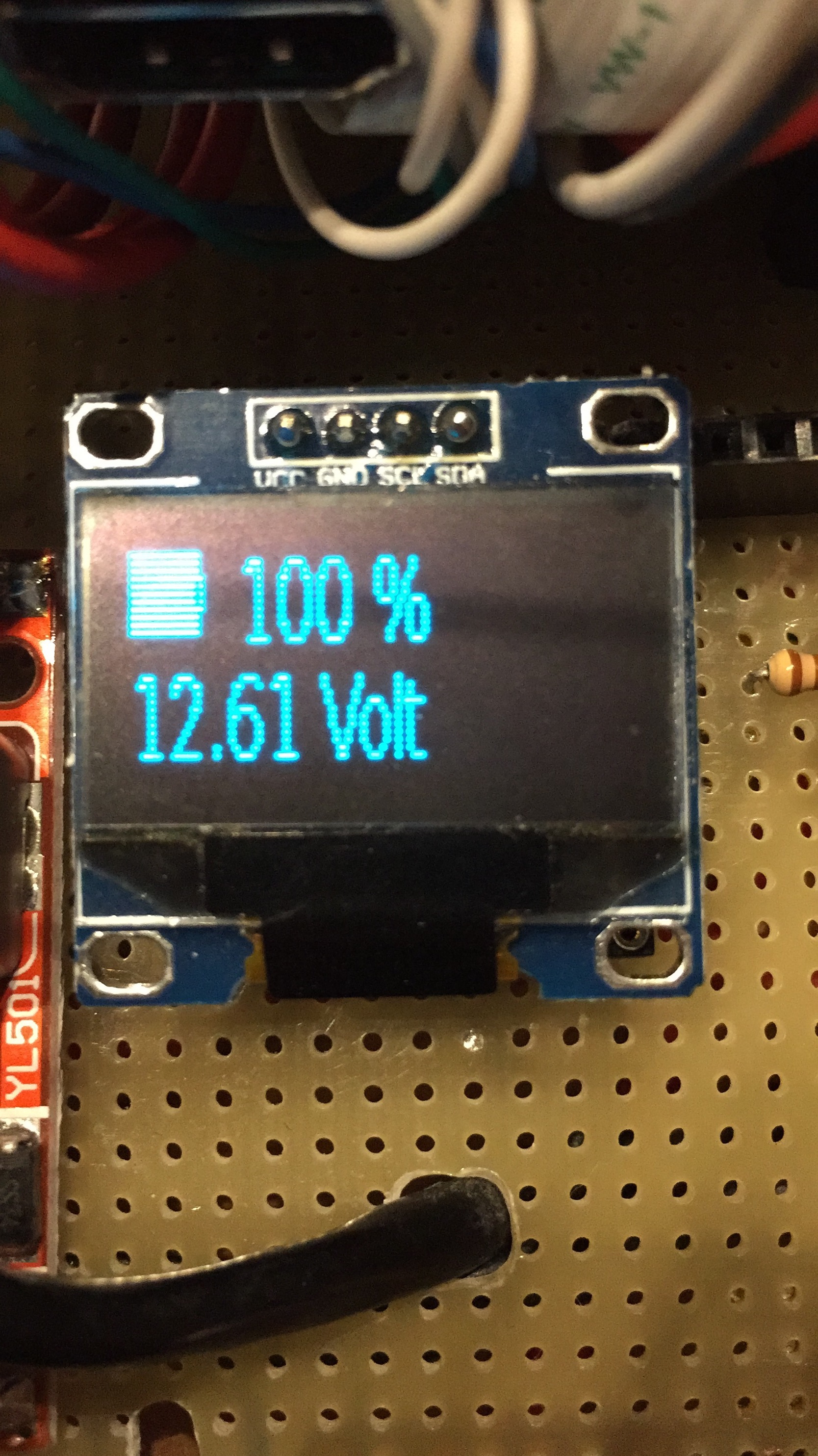
Ein erstes Test-Video zeigt das pixelgenaue „Befüllen“ eines eigenen Batterie-Symbols:
Und hier ist es dann so richtig in Betrieb – mit weiteren Anzeigen wie der IP-Adresse, der CPU-Temperatur, des Hostnamen etc.:
Hier findet ihr übrigens den vollständigen Sourcecode dazu.
Genau das ist ein richtiger Spannungsteiler wie ich es im anderen Beitrag bemängelt habe. Sehr gut!
Danke. :)
Danke für die Erklärung.
Ich habe dazu noch zwei Fragen:
1. Warum wurde der Spannungsteiler durch einem Kondensator ergänzt?
2. Worum handelt es sich bei dem Board rechts neben dem Display (und wofür ist es)?
Danke dir
Ich weiß es ehrlich gesagt nicht mehr, Tim… Ich habe mir das vermutlich irgendwo im Netz mit Stolz kopiert. ;-)
Wenn du das Foto ganz oben mit dem Breadboard meinst, das ist ein 9-DOF-Sensor inkl. Beschleunigungssensor, Magnetometer und Gyroskop. Siehe zum Beispiel auch hier: https://www.exp-tech.de/sensoren/beschleunigung/6446/adafruit-9-dof-absolute-orientation-imu-fusion-breakout-bno055
Danke für die Antwort!
…und das mit dem Kopieren hate ich auch vor! ;-)
*hatte
Hallo,
soeben deinen Beitrag angefunden. Würde ich gerne “ nachbauen “ :-)
Ich möchte für meine Astro Ausrüstung eine 12V Akku Überwachung bauen und bei Unterschreitung, ein Relay abschalten und den Pi runterfahren.
Leider bin ich nicht so bewandert mit den I2C und Co. Hättest du bitte einen ganzen Schaltplan, wo die Messung inkl. Display am Raspi hängt?
Vielen Dank und frohe Ostern
Hallo Hannes,
schau dir mal die Links oben im Beitrag genau an. Insbesondere den zum ADS1115. Dort findest du eine detaillierte Anleitung, wie das am Raspi angeschlossen wird.
Die Ansteuerung des Displays habe ich hier beschrieben:
https://www.direcs.de/2017/03/oled-grafik-eine-batterie-anzeige/