Mein Roboter
An dieser Stelle möchte ich zeigen, welche Komponenten aktuell bei meinem Roboter minibot verbaut sind und was diese so kosten können.
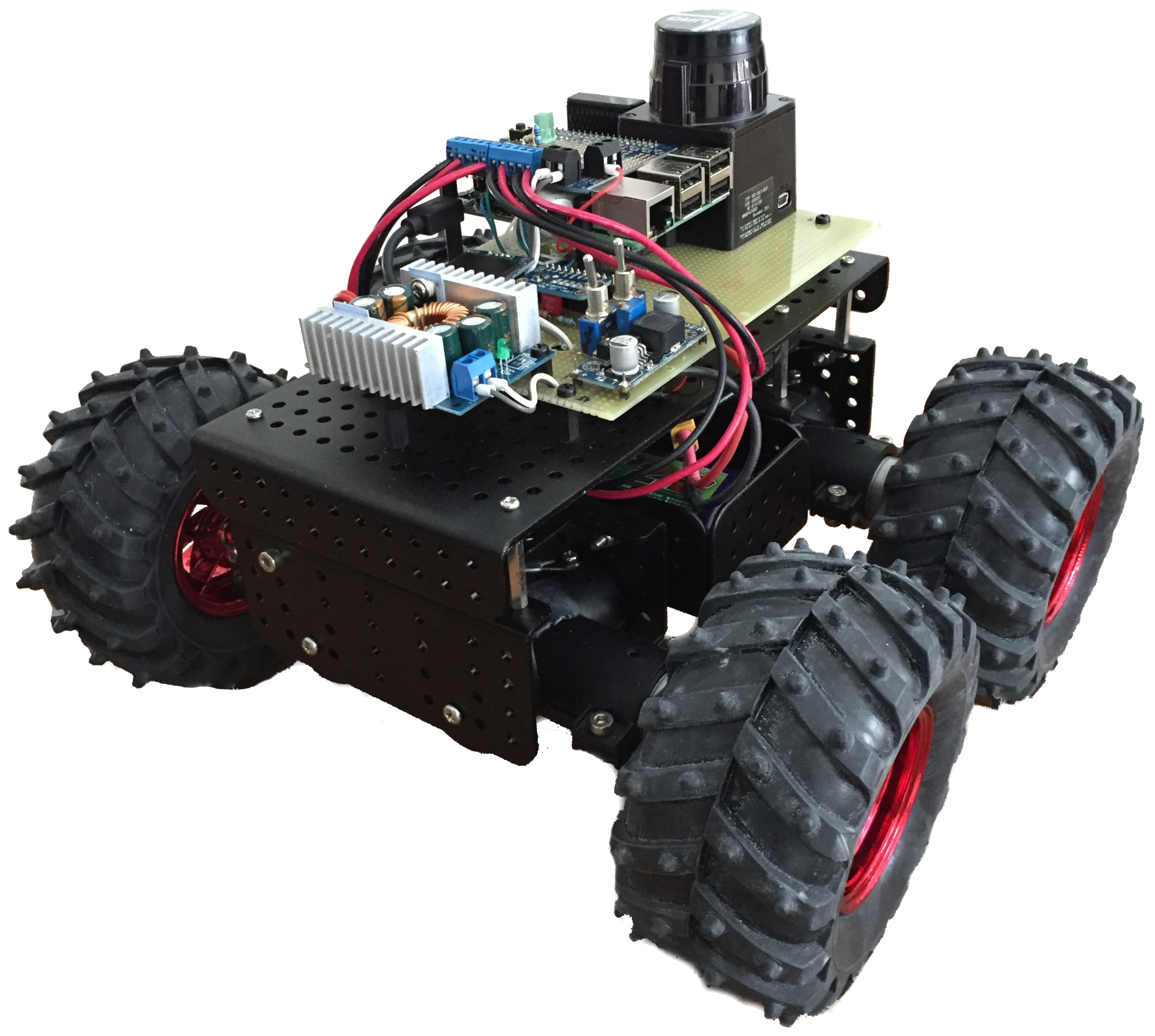
An dieser Stelle möchte ich zeigen, welche Komponenten aktuell bei meinem Roboter minibot verbaut sind und was diese so kosten können.
Na ja, was soll man von fertig aufgebauten, mit Heißkleber zugeschmadderten Kabeldurchführungen auch halten…
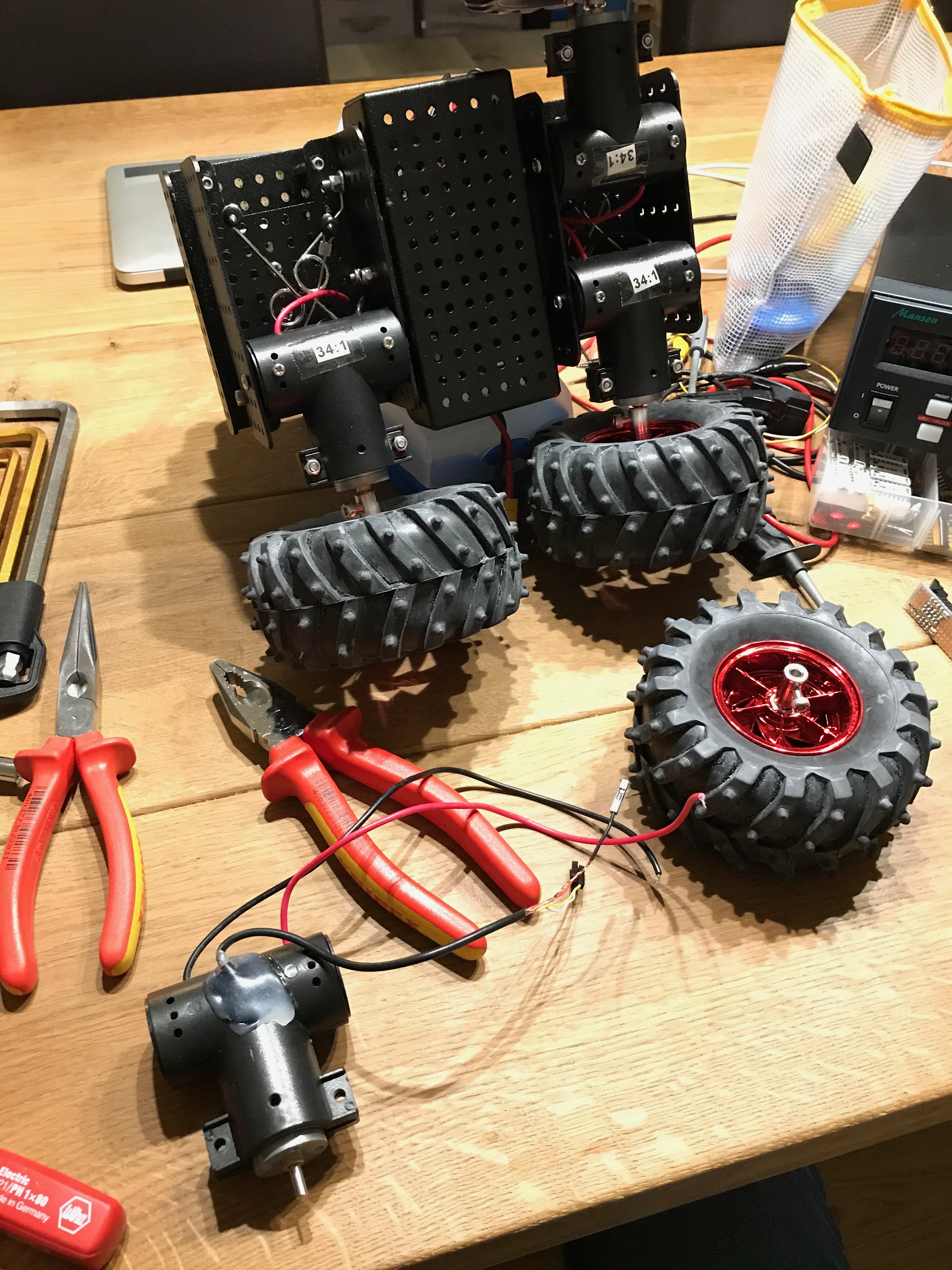
Nach langer Fehlersuche mit einem der Motorencoder stellte sich schlicht und einfach heraus, dass die Lötstellen von wirklich schlechter Qualität sind; na ja und die Leitungen eigentlich auch. Aber gut, flus das ganze auseinander gebaut, vom Kleber befreit und neu verlötet:


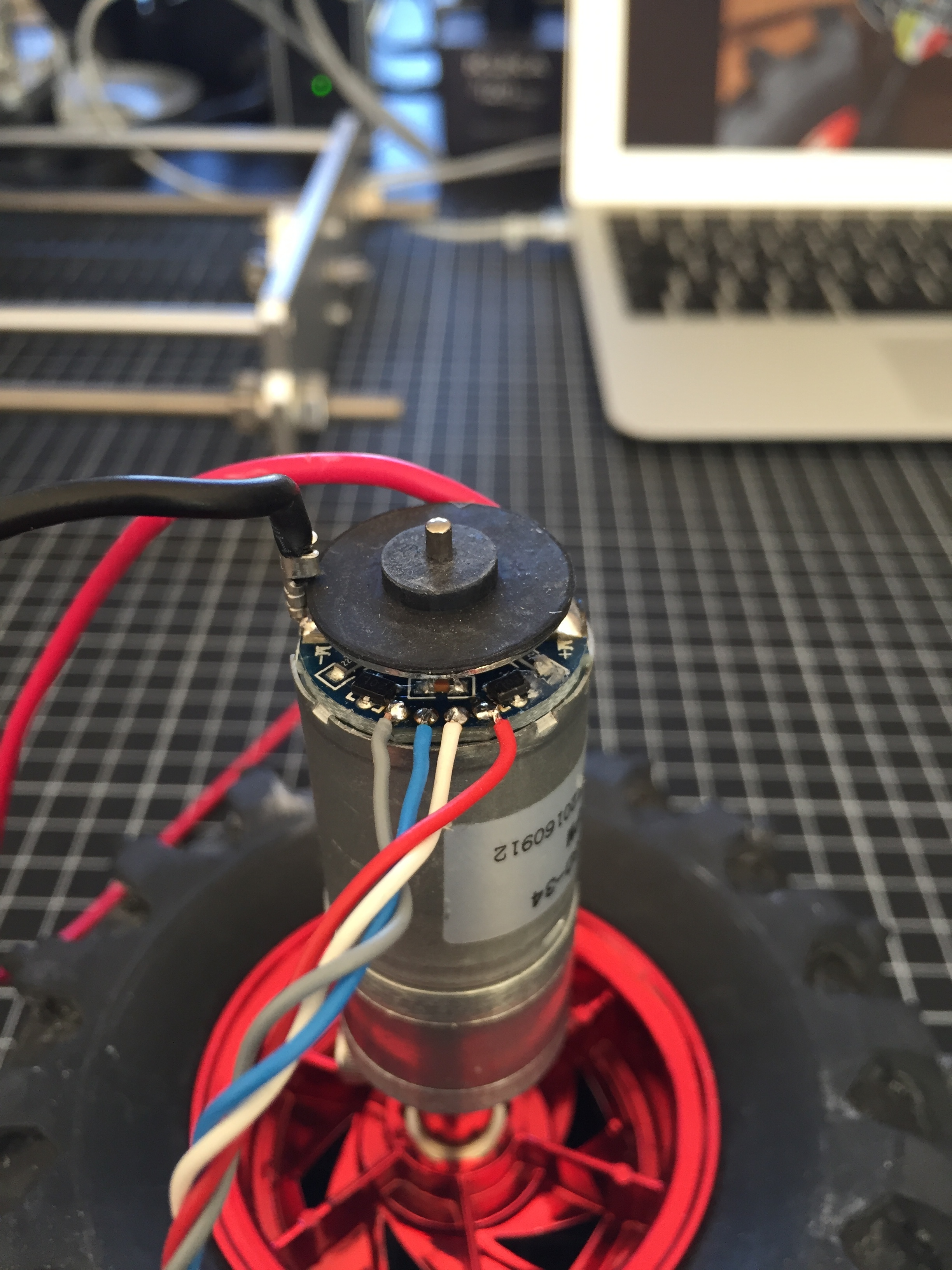
Toll dann, wenn man alles fertig hat und nach einiger Zeit wieder eine Leitung ab ist… Hatte ich erwähnt, dass die Leitungen offenbar nicht die tollsten sind? Also gut, nun eigene angelötet und hoffen, dass diese länger halten:
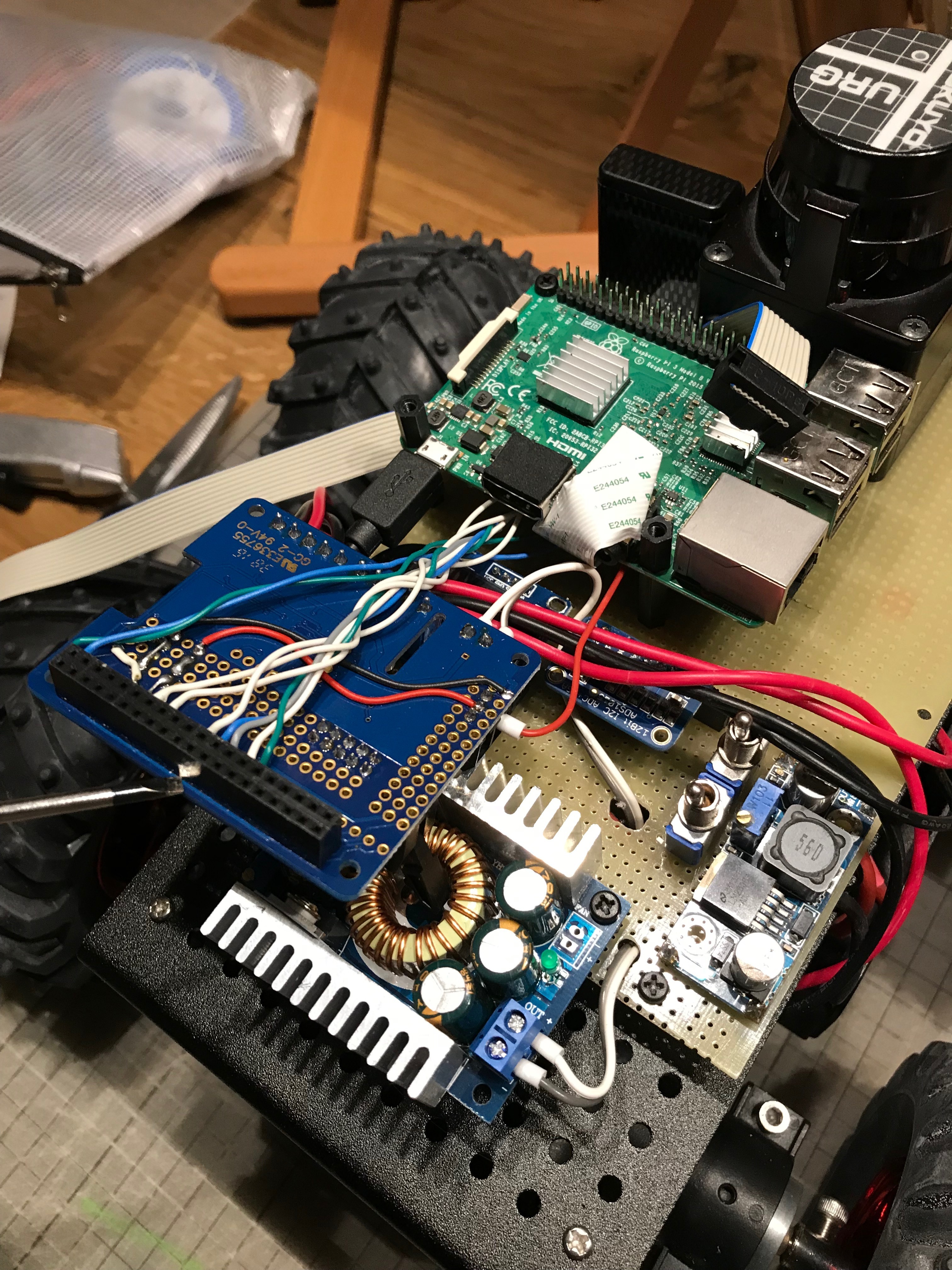
Da ich mit dem neuen Chassis ja bessere Odometrie bekommen wollte, als mit dem Raupenantrieb, war es langsam an der Zeit die Encoder der Motoren zu verkabeln.
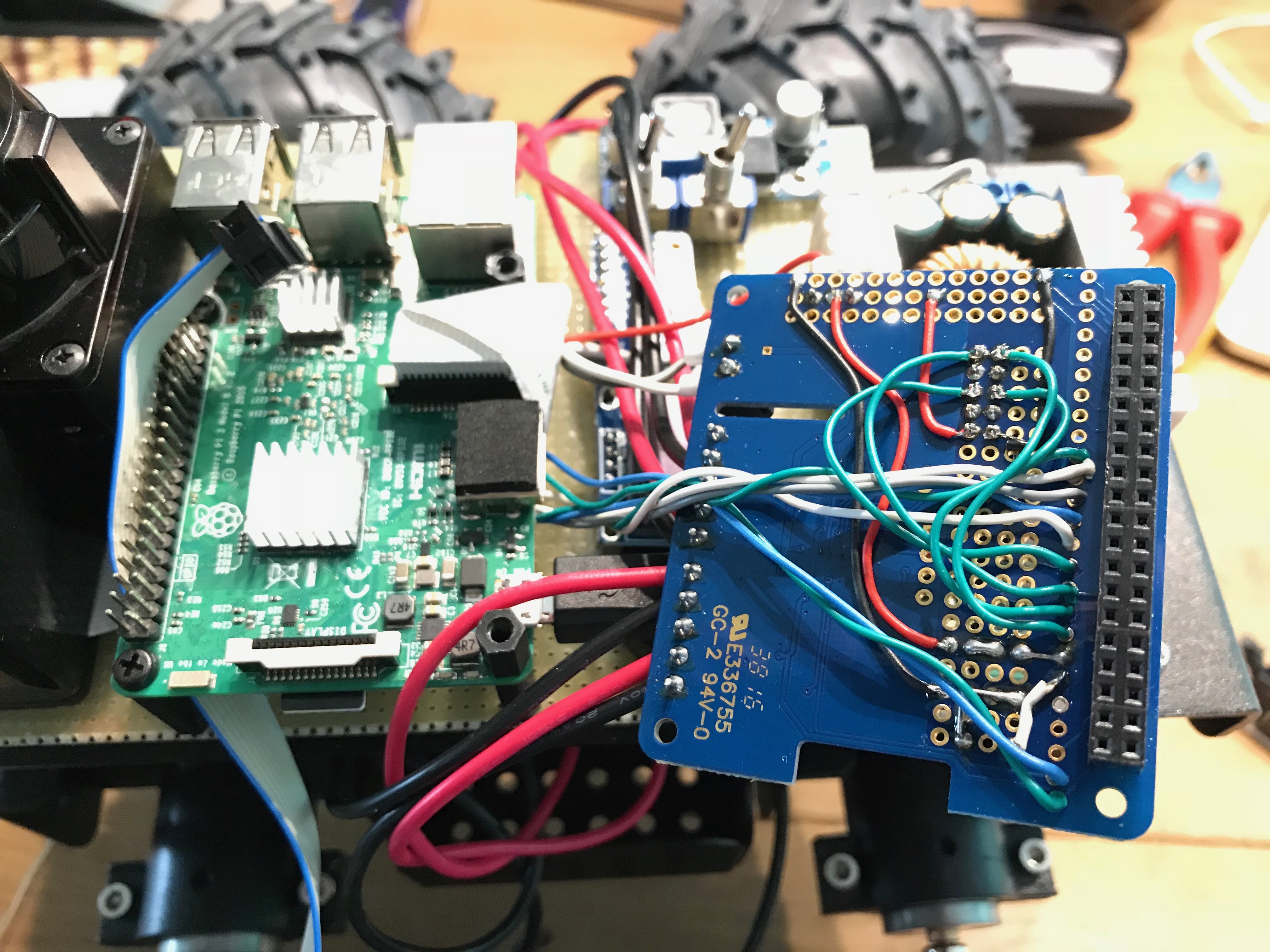
Hier sprechen wir von vier Leitungen pro Motor: GND, 3.3 Volt, „links“ und „rechts“. Diese sollen am besten per Flachbandkabel mit dem Raspberry Pi verbunden werden. Hierzu habe ich mir eine kleine Adapterplatine mit Wannenstecker gelötet:
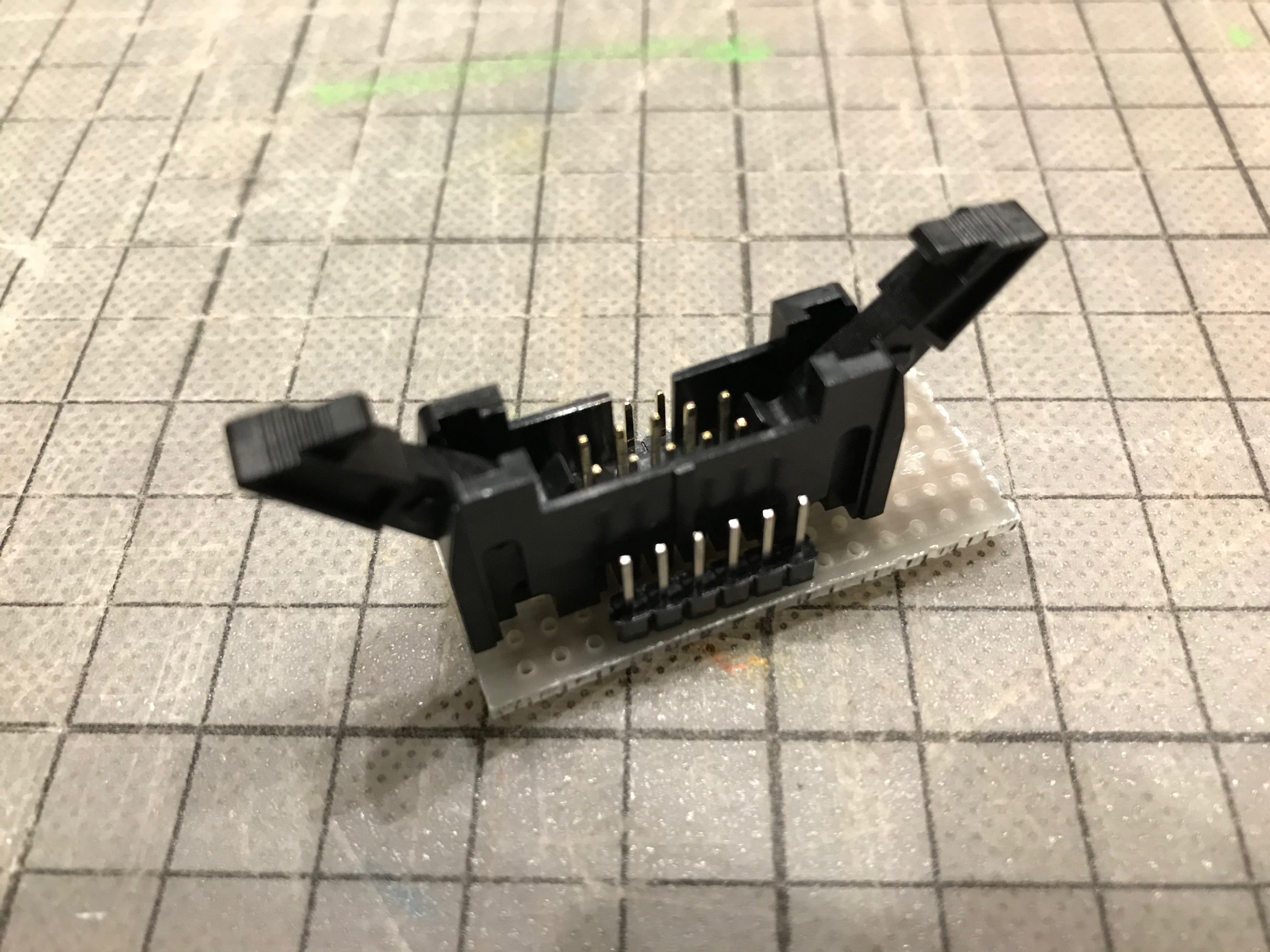
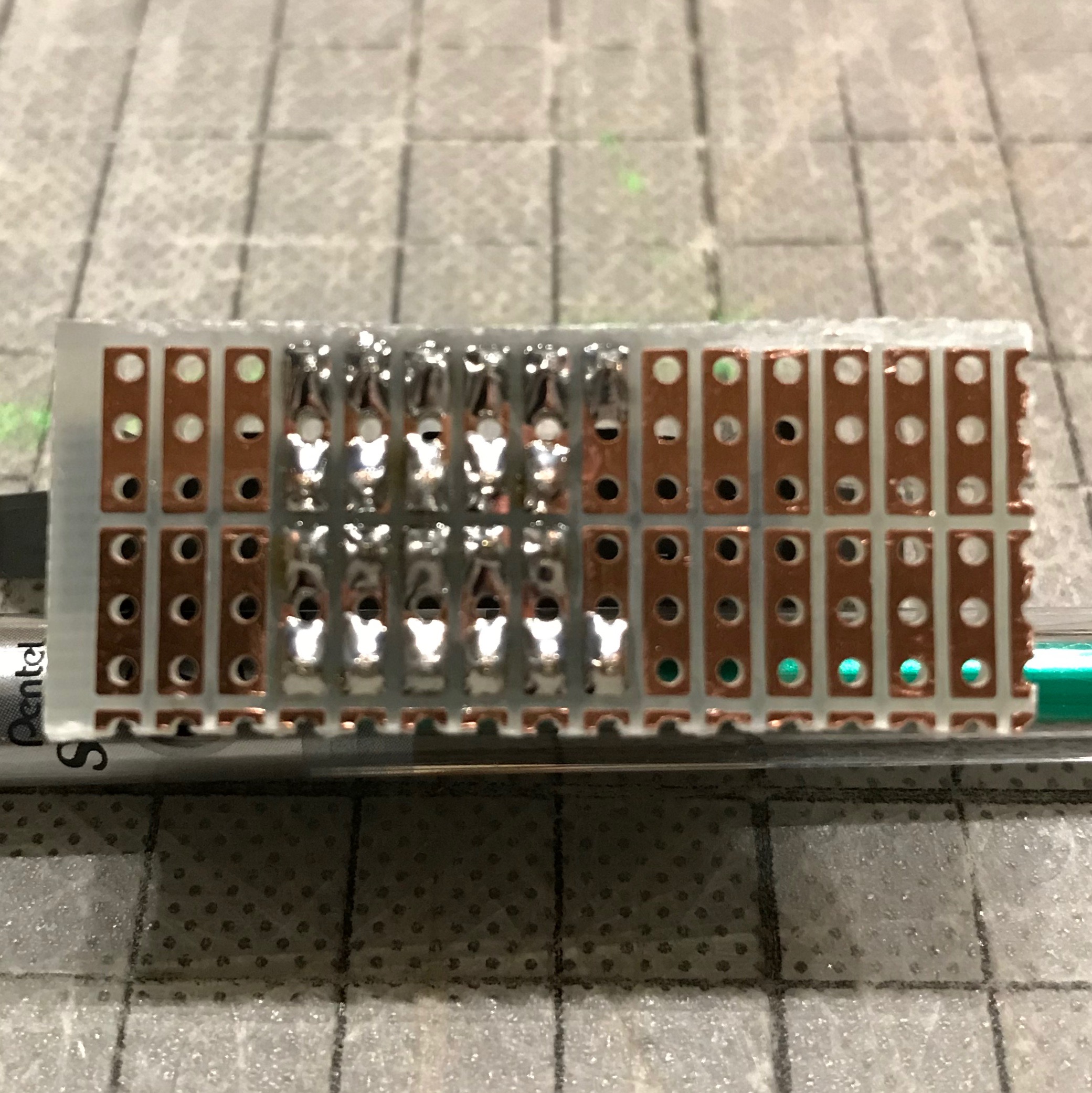
Auf dem Motor HAT für den Raspberry Pi ist praktischerweise noch Platz für eigene Bauteile, hier habe ich nun den Wannenstecker für das Flachbandkabel als Gegenstück eingelötet und mit den GPIOs der Pi verbunden.
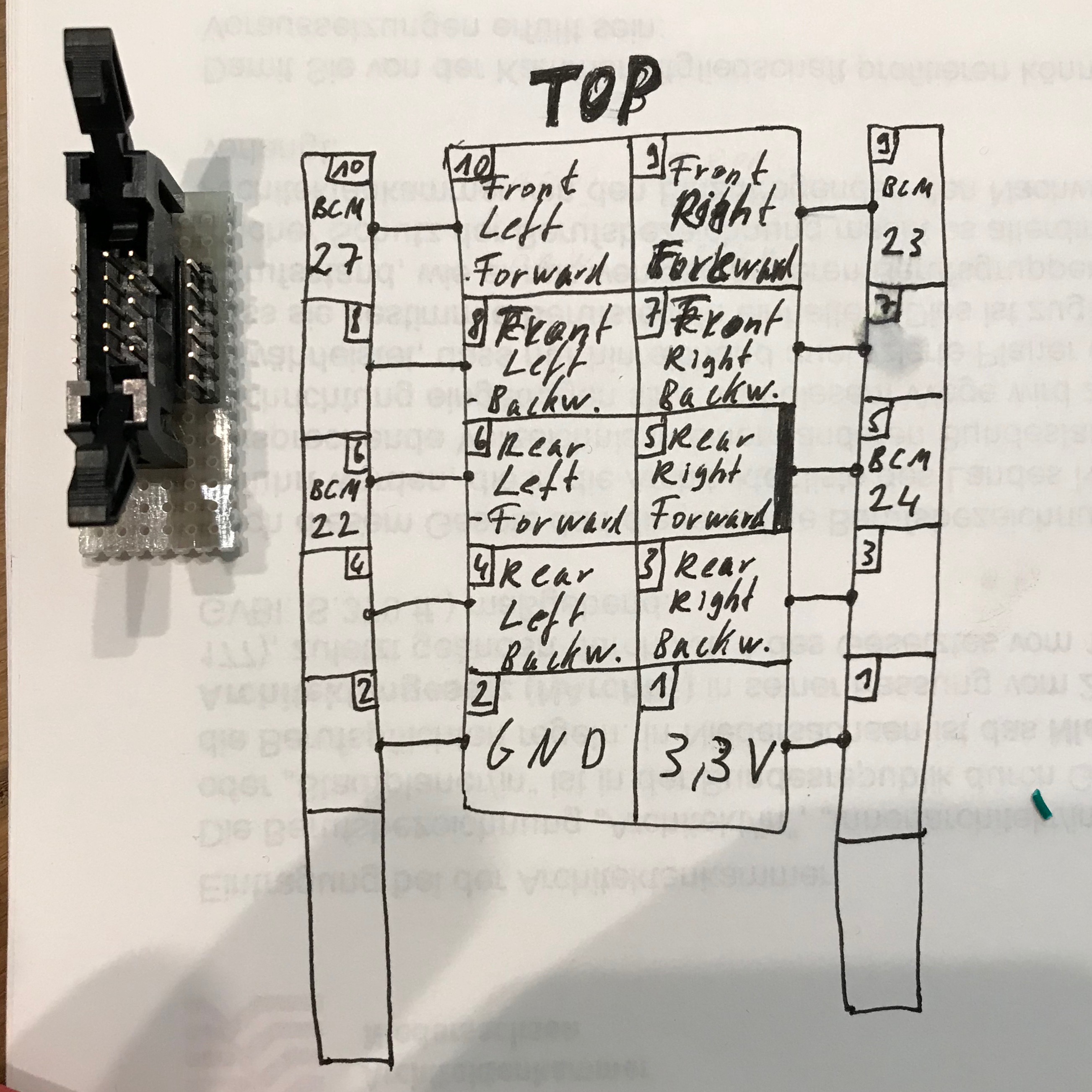
Und da man am Ende immer vergessen hat, wie die Belegung war, hier schnell ein Foto für meine eigene Dokumentation:
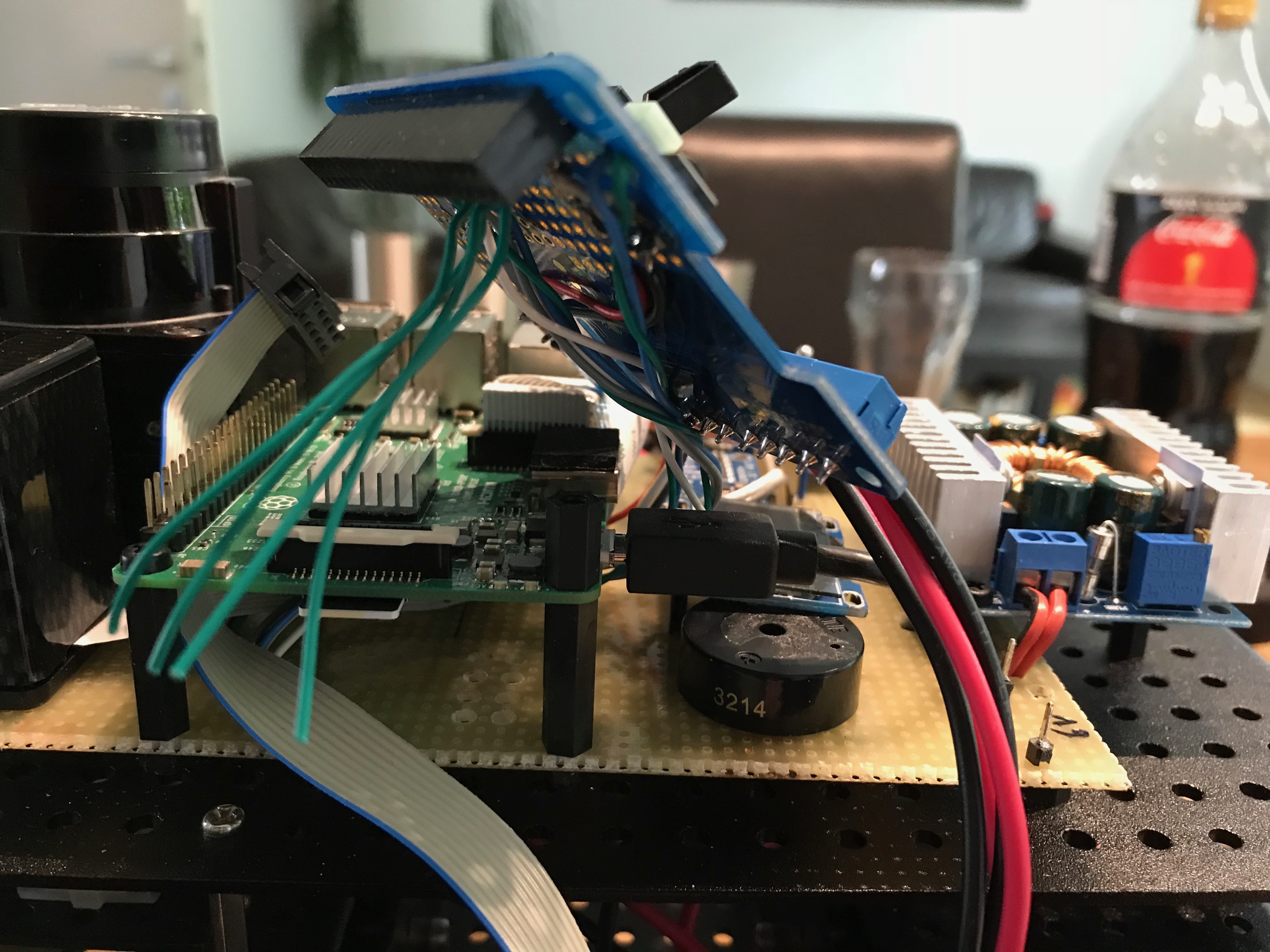
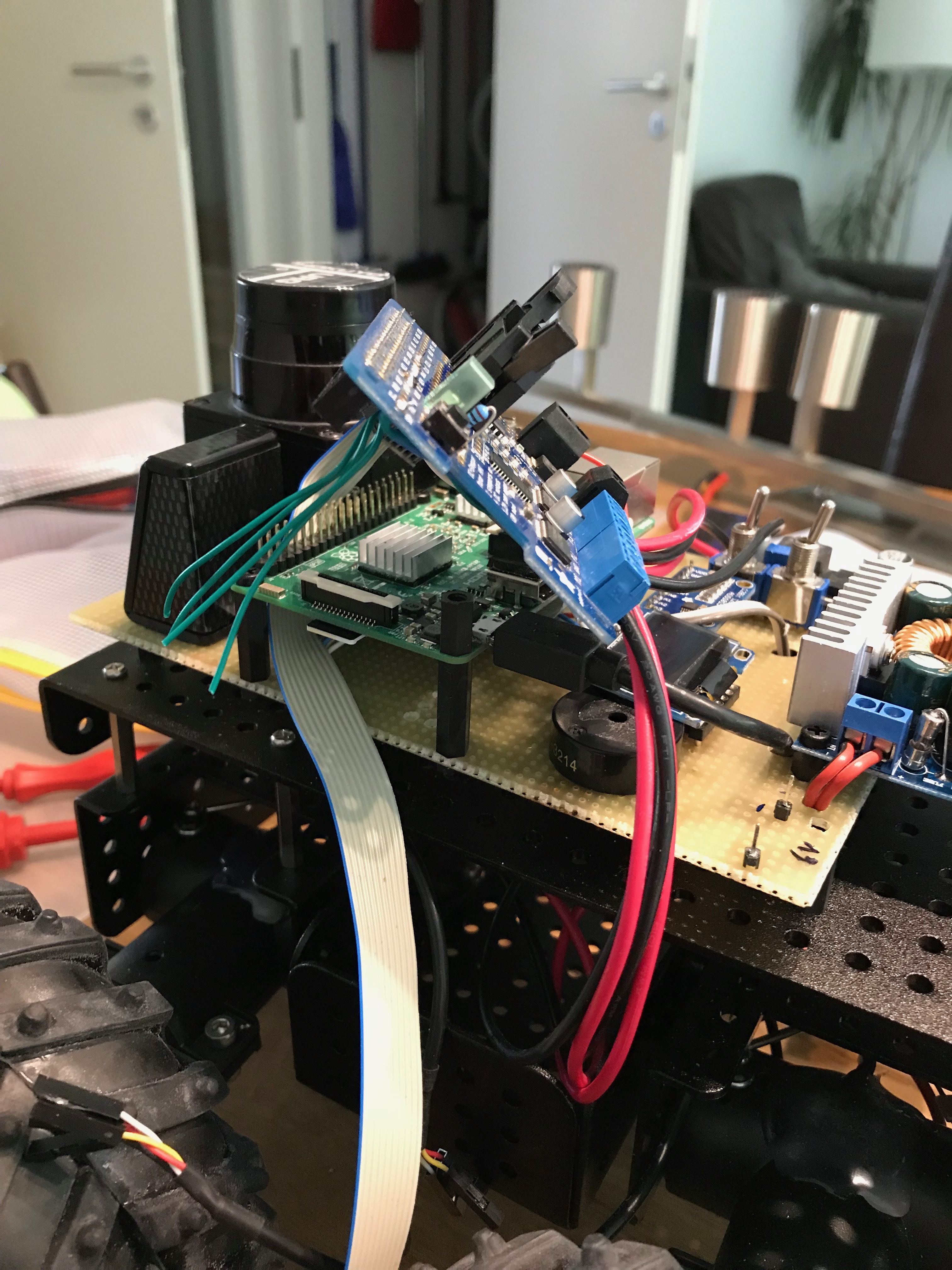
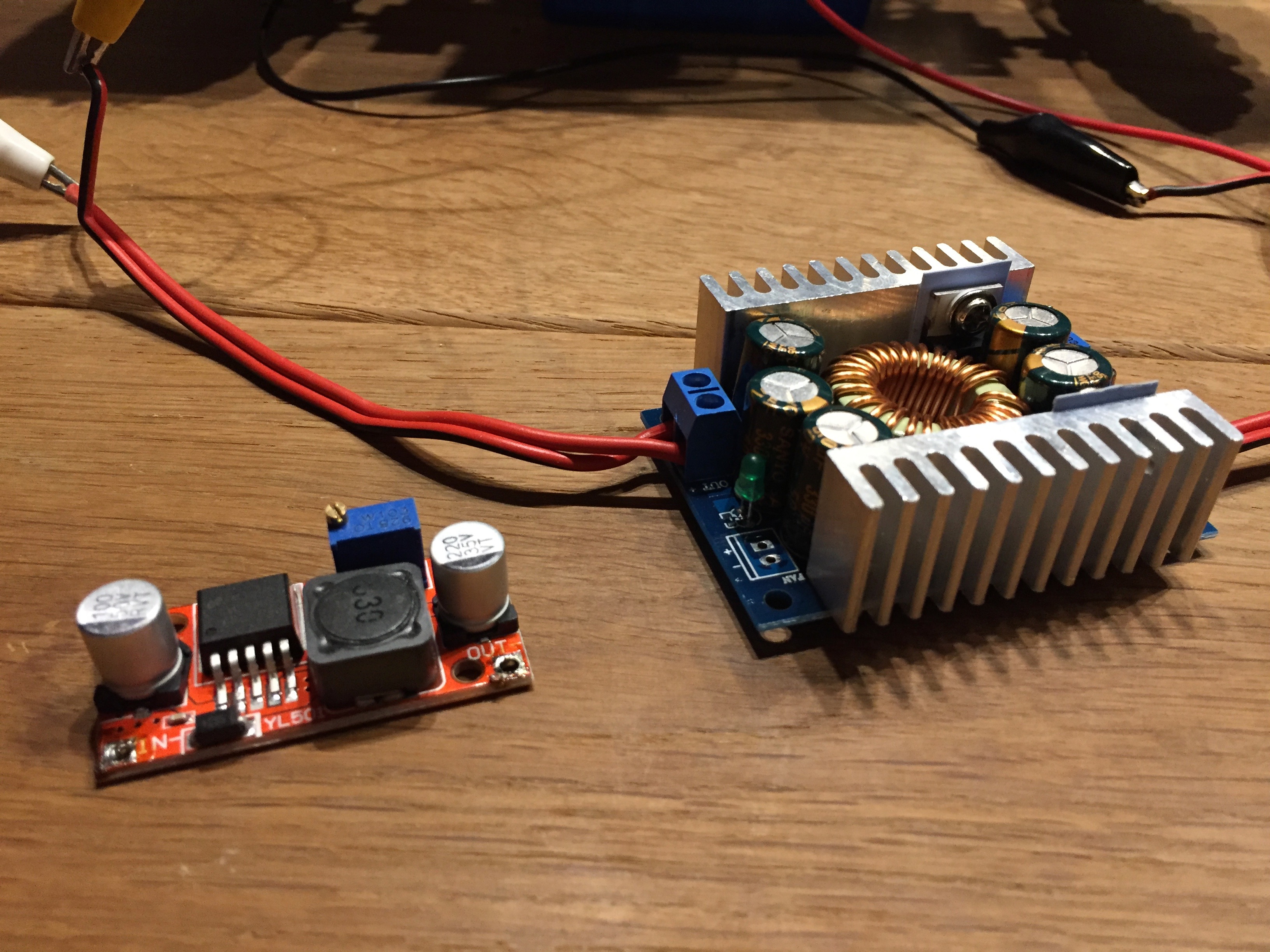
Durch das neue Chassis für den minibot, und damit den neuen vier Motoren, stieg der Stromverbrauch derart an, dass ein neuer Schaltregler her musste. Dieser regelt die Spannung von der LiPo-Batterie auf 6 Volt für die Motoren bzw. das Motor-Hat herunter.
Manchmal sieht etwas so einfach aus: Schaltplan skizzieren, alles aufbauen und los geht’s. Das dachte ich auch bei meinem neuen Roboter dem minibot. Aber leider bewegten sich die Motoren meines kleinen Bots kein Stück.
Lange suchte ich den Fehler in der neu erstellten Test-Software, die ich (erstmals) in Python programmierte. Insbesondere, da das Monster Moto Shield zur Geschwindigkeitsregelung der Motoren PWM (Pulsweitenmodulation) benötigt. Diese wird mit dem verwendeten Python-Modul GPIO per Software erzeugt. Zum Mitmachen und Suchen des Fehlers hier einmal der verwendete Sourcecode:
Auf dieser Seite soll der allgemeine Aufbau meines neuen Mikrokopter dargestellt werden. Der Name des Kopters lautet übrigens recopter1. Und das sind die Bestandteile bisher: Allgemeiner Aufbau „recopter1“ weiterlesen
Wie es aussieht, weisen die Motorcontrol-Boards einen Defekt auf. Hier wurde nun eines der Boards bereits gegen ein neues ausgetauscht. Und *tusch* hier das Ergebnis:
Im letzten Video zeigte sich, dass anscheinend immer 12 Volt bei den Motoren ankommen, zumindest per Messgerät gemessen. Nun erfolgt der gleiche Test erneut, also mit Betrachtung der Portbits über die 7-Segement-Anzeige (die offenbar immer okay sind). mit angeschlossenen Messgeräten aber zusätzlich mit angeschlossenen Motoren. Hier das Ergebnis:
Ofenbar verhält sich das Motorboard anders, wenn die Motoren anschlossen sind und schaltet die 12 Volt nicht immer / nicht mehr korrekt. Um nun noch als letzte Fehlerursache die Motoren auszuschließen, wurde als nächstes das Ganze noch einmal mit einem Motor im Austausch getestet – mit dem Scheibenwischermotor im Vordergrund:
Das Finale ist nah…
PS.: Leider war es im Video etwas dunkel und man erkennt die Spannungen auf den Messgeräten nicht wirklich. Sorry.
Als nächstes galt es festzustellen, ob vielleicht die 12 Volt nicht durch die Motorcontrol-Boards nicht korrekt „geschaltet“ werden. Dazu wurden nun je Motor ein Messgerät angeschlossen und parallel die Ports über die 7-Segement-Anzeige beobachtet. Aber seht selbst:
Das Ergebnis ist noch nicht wirklich erklärbar. Anscheinend funktionieren die Motorcontrol-Boards korrekt. Die Motoren an sich waren aber okay. Fortsetzung folgt…
Bei der weiteren Analyse wurde nun die 7-Segement-Anzeige zu Signalisierung der Portbits parallel zum Motorboard it den Motoren angeschlossen. Wie man sieht, werden die Bits korrekt gesetzt, aber trotzdem bleibt gelegentlich ein Motor stehen: