Nachdem es in der Vergangenheit öfter Probleme mit der seriellen Übertragung gab, fiel der Entschluss, alle Übertragungen zwischen dem Atmelboard und dem Computer nicht mehr in Binärform sondern in reinem ASCII zu senden. Dazu wurde im git Repository ein neuer Branch namens AtmelSerialClearText angelegt und seit Mitte August immer mal wieder daran gearbeitet. Nun ist es endlich soweit, nahezu alle Funktionen sind komplett auf die neue Übertragungsmethode umgestellt – sowohl auf Computer, als auch auf Atmel-Seite. Wie man sieht, waren dazu doch einige Änderungen nötig:
Merge made by recursive.
direcs-avr/adconv.c | 33 ++
direcs-avr/adconv.h | 6 +
direcs-avr/main.c | 1040 +++++++++++++++++++++++++++++————–
direcs-avr/main.h | 13 +-
direcs-avr/micromag.c | 4 +
direcs-avr/usart.c | 174 ++++++–
direcs-avr/usart.h | 38 ++-
direcs/direcs.tag | 193 ++++++–
direcs/src/circuit.cpp | 112 ++++-
direcs/src/circuit.h | 39 ++-
direcs/src/direcs.cpp | 127 +++++-
direcs/src/direcs.h | 19 +-
direcs/src/direcsSerial.cpp | 65 ++–
direcs/src/direcsSerial.h | 2 +-
direcs/src/gui.cpp | 79 ++++-
direcs/src/gui.h | 37 ++-
direcs/src/interfaceAvr.cpp | 98 ++++
direcs/src/interfaceAvr.h | 58 ++-
direcs/src/mainWindow.ui | 86 +++-
direcs/src/motor.cpp | 792 +++++++++++++++++++++———–
direcs/src/motor.h | 46 +-
direcs/src/plotThread.cpp | 47 ++-
direcs/src/plotThread.h | 14 +-
direcs/src/sensorThread.cpp | 495 +++++++++++———-
direcs/src/sensorThread.h | 27 +-
25 files changed, 2540 insertions(+), 1104 deletions(-)
Zusätzlich wurde das serielle Verfahren auf dem Atmel ebenfalls vollständig neu geschrieben und arbeitet nun – anstatt in einer Endlosschleife auf den Empfang eines Zeichens zu warten – vollständig interruptbasiert.
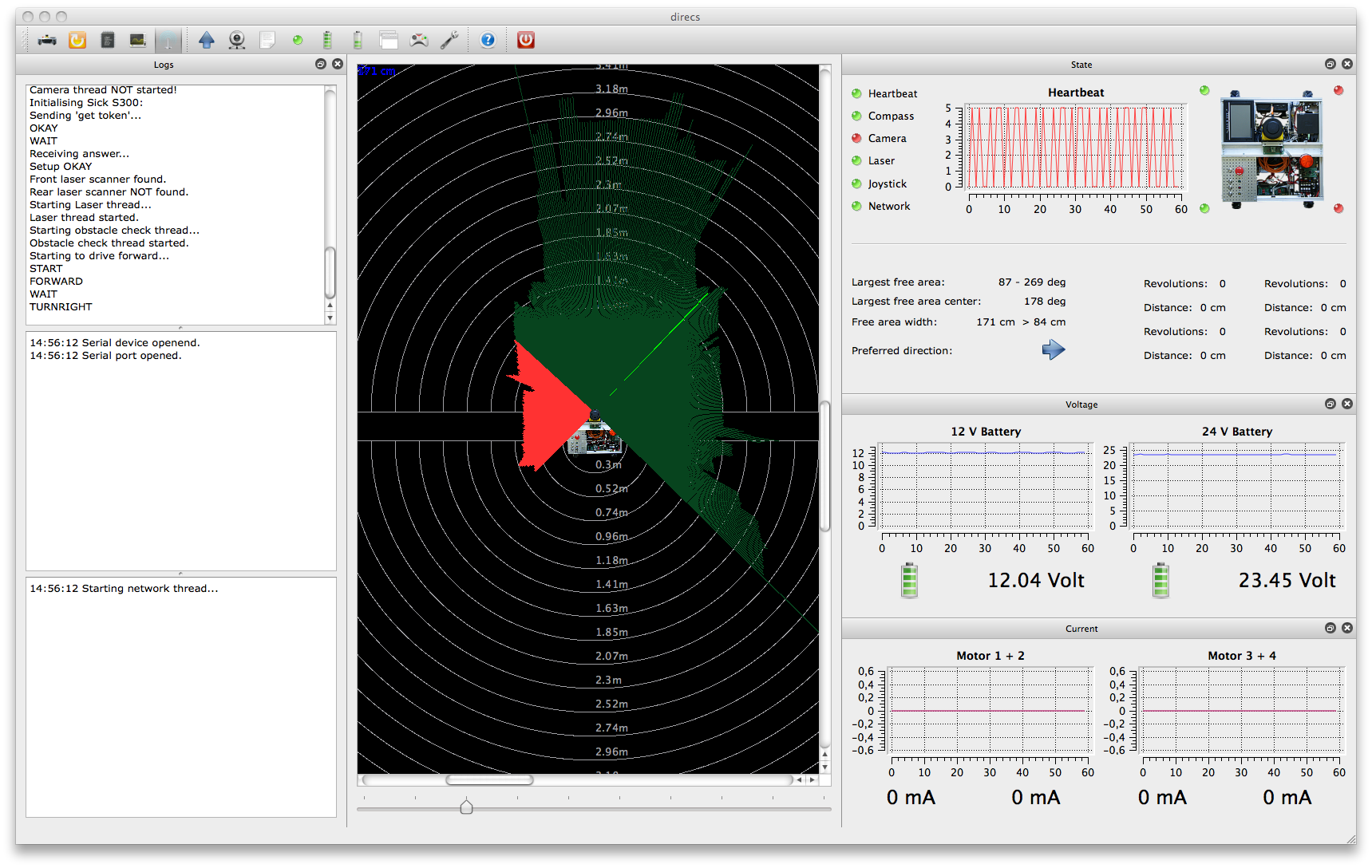
Wie aber weiß nun der Atmel, wann eine Übertragung für ihn anfängt oder abgeschlossen ist? ganz einfach: Jede Übertragung muss mit einem ‚*‘ starten und mit einem ‚#‘ enden. Alle anderen Zeichenketten werden ignoriert. Eine Signalisierung über LEDs auf der Platine findet ebenfalls statt: Bei jedem empfangenen Zeichen blinkt die rote LED abwechselnd und sobald das Ende eines Befehls mit # erkannt wurde (und zuvor auch mit * startete!) wird dieses über eine grüne LED angezeigt.
Diese Art der Übertragung hat den Vorteil, dass man sie per Terminalprogramm gut debuggen kann, denn es werden nur ASCII-Zeichen verwendet. Zusätzlich antwortet der Atmel auch immer mit der empfangenen Zeichenkette, die wiederum vom Computer als Antwort überprüft wird. Eine neue Sicherheitsfunktion, die zuvor fehlte. Auch kann man dem Atmel so selbst mit einem Terminalprogramm Befehle senden und „sieht“ was er antwortet. Fragt man einen Wert vom Atmel ab, so antwortet er nur mit diesem Wert und dem Starter und Terminator, also z.B. mit *42#.
Und das sind die derzeitigen Befehle:
re = reset
s1 = get value from sensor 1
…
s8 = get value from sensor 8
s16 = get value from sensor 16
cc = check if compass module is connected. ‚ok‘ or ‚er‘
cx = get value from compass axis x
cy = get value from compass axis y
cz = get value from compass axis z
ms1 = get value from motor sensor 1
…
ms4 = get value from motor sensor 4
dd1 = get driven distance 1
..
dd4 = get driven distance 4
id1 = init distance 1
…
id4 = init distance 4
mp1of = motor power 1 off
…
mp4of = motor power 4 off
md1cw = motor direction 1 clockwise
…
md4cw = motor direction 4 clockwise
md1cc = motor direction 1 counterclockwise
…
md4cc = motor direction 4 counterclockwise
mv1nnn = set motor velocity 1 to nnn (0-255)
…
mv4nnn = set motor velocity 4 to nnn (0-255)
mv0nnn = set motor velocity for all motors to nnn (0-255)
bdf = bot drive forward
bdb = bot drive backward
bdl = bot drive left
bdr = bot drive right
btl = bot turn left
btr = bot turn right
bgo = bot go
bst = bot stop
bwa = bot wait