Nach diversen Aktualisierungen im Programmcode sollte auch etwas für die Optik getan werden. Zur leichteren Erkennbarkeit wurden weitere "LEDs" hinzugefügt:
Diese zeigen den Status diverser Module an:
- Der Heartbeat blinkt im Rhythmus der Antworten vom Atmel-Board durch Abfrage des Sensorthreads. Sie leuchtet konstant rot, wenn der Roboter nicht als angeschlossen erkannt wurde.
- Die Compass-LED zeigt an, ob das Compass-Modul mit dem Atmel-Board physisch verbunden ist.
- Die Camera-LED leuchtet (derzeit), wenn mittels OpenCV eine angeschlossene Kamera erkannt wurde.
- Die Joystick-LED ist grün, wenn ein Joystick angeschlossen ist.
- Die Network-LED soll einmal anzeigen, wenn eine Kommunikation über WLAN mit direcs-remote stattfindet (welches wichtige Status.-Werte des Roboters remote anzeigt).
- Eine hier noch nicht dargestellte weitere Laser-LED zeigt an, ob der Laserscanner erkannt wurde.
Als weitere Verbesserung wurden die Plot-Bereiche mit Gitternetzlinien versehen, was nicht nur eine leichtere Lesbarkeit bewirkt, sondern insgesamt einen professionelleren Eindruck macht: ![]()

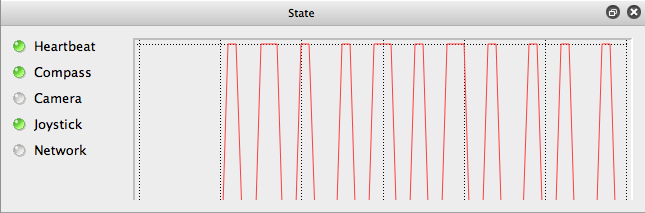
Um auf einen Blick noch schneller den Status des Roboters darzustellen, wurde ein weiterer Plot-Bereich hinzugefügt, der im Prinzip den wechselnden Status der Heartbeart-LED darstellt:
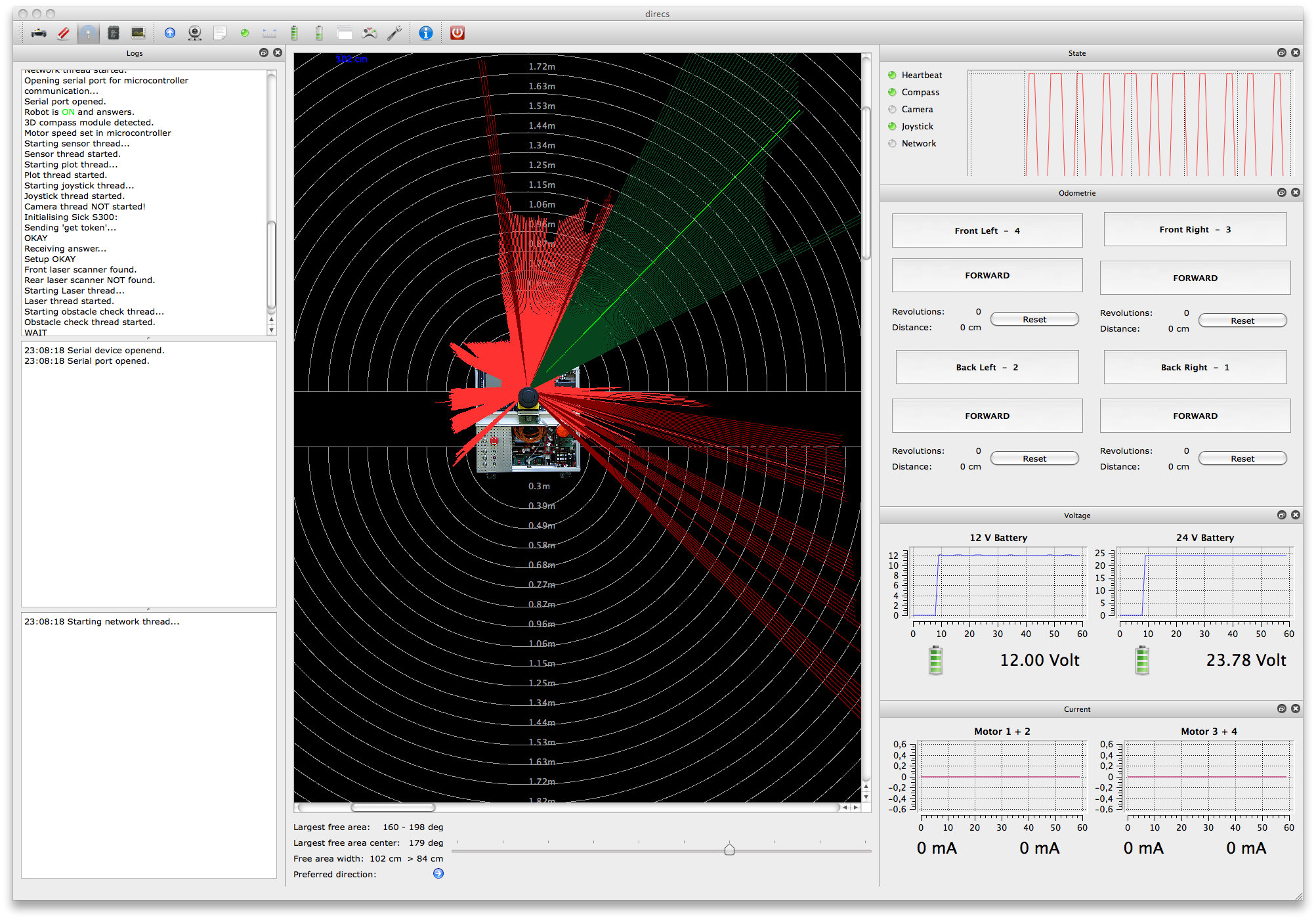
Und so sieht das ganze dann vollständig im Betrieb aus: