Zum leichteren Testen wurde dem Programm eine Steuerung eines USB-Joysticks/Gamepads hinzugefügt.
So sieht der Joystick aus:

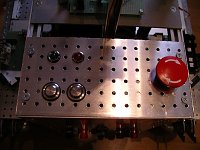
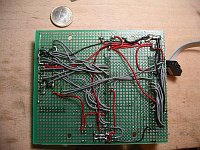
Endlich wurde die zentrale Stgromversorgung/verteilung korrigiert. Ein zentrales "Schaltpult", und schon einmal ein Sicherungshalter in Vorbereitung:

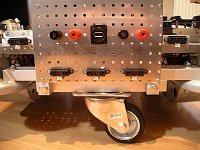

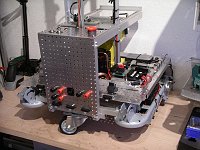
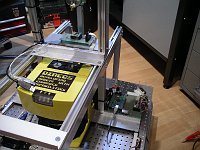
und so sieht das ganze dann vollständig aus: