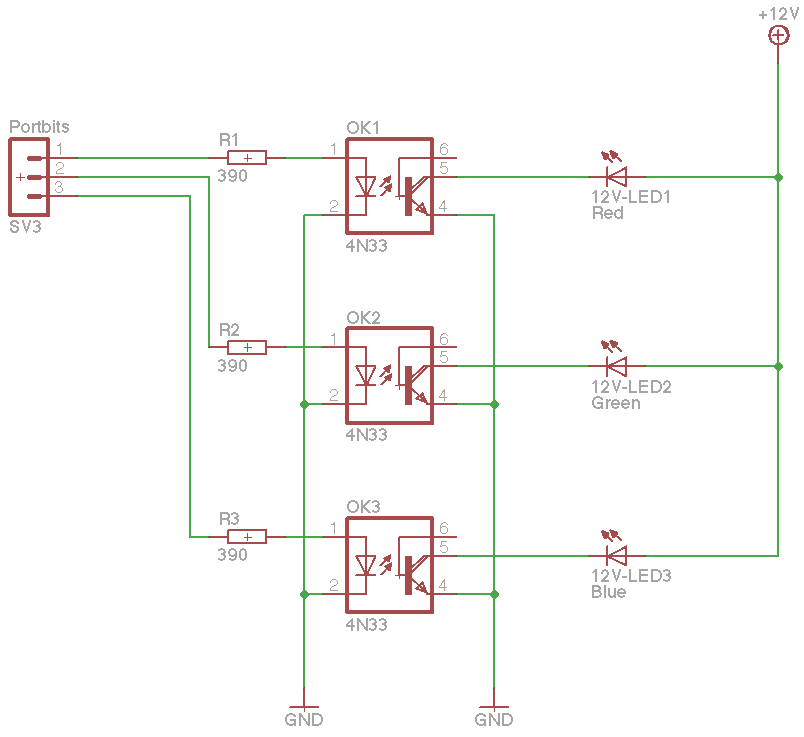
Manchmal sieht etwas so einfach aus: Schaltplan skizzieren, alles aufbauen und los geht’s. Das dachte ich auch bei meinem neuen Roboter dem minibot. Aber leider bewegten sich die Motoren meines kleinen Bots kein Stück.
Lange suchte ich den Fehler in der neu erstellten Test-Software, die ich (erstmals) in Python programmierte. Insbesondere, da das Monster Moto Shield zur Geschwindigkeitsregelung der Motoren PWM (Pulsweitenmodulation) benötigt. Diese wird mit dem verwendeten Python-Modul GPIO per Software erzeugt. Zum Mitmachen und Suchen des Fehlers hier einmal der verwendete Sourcecode: