Mein Roboter
An dieser Stelle möchte ich zeigen, welche Komponenten aktuell bei meinem Roboter minibot verbaut sind und was diese so kosten können.
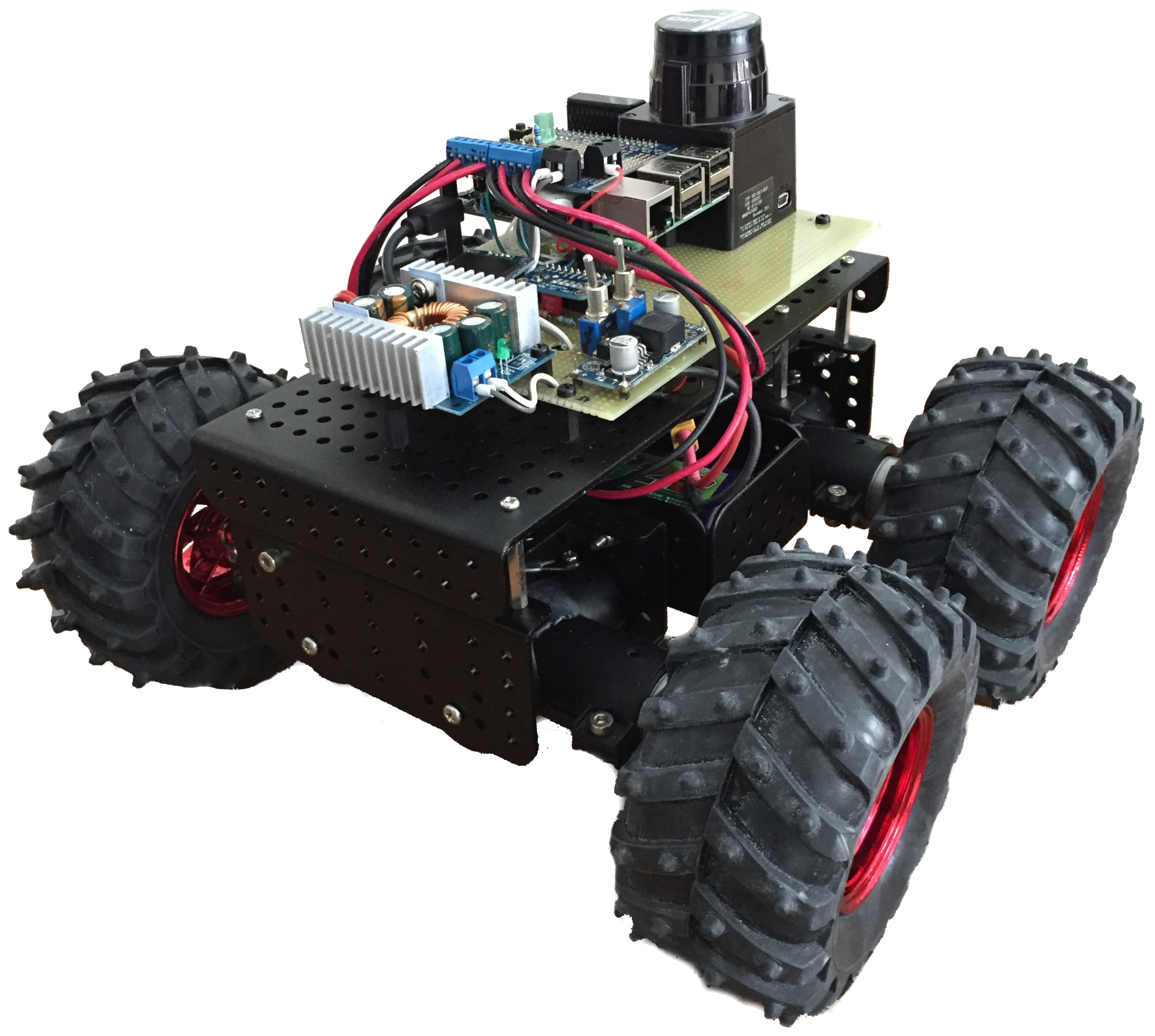
An dieser Stelle möchte ich zeigen, welche Komponenten aktuell bei meinem Roboter minibot verbaut sind und was diese so kosten können.
Manchmal sieht etwas so einfach aus: Schaltplan skizzieren, alles aufbauen und los geht’s. Das dachte ich auch bei meinem neuen Roboter dem minibot. Aber leider bewegten sich die Motoren meines kleinen Bots kein Stück.
Lange suchte ich den Fehler in der neu erstellten Test-Software, die ich (erstmals) in Python programmierte. Insbesondere, da das Monster Moto Shield zur Geschwindigkeitsregelung der Motoren PWM (Pulsweitenmodulation) benötigt. Diese wird mit dem verwendeten Python-Modul GPIO per Software erzeugt. Zum Mitmachen und Suchen des Fehlers hier einmal der verwendete Sourcecode:
Wie im letzten Beitrag schon kurz angedeutet, darf man die serielle Schnittstelle des RasPi niemals direkt mit einem PC, Mac oder andere Schaltkreis (z.B. Arduino) verbinden! Es besteht ein hohes Risiko, dass der Raspberry dabei zerstört wird! Warum ist das so und wie kann sie nun doch verbinden?
Der RasPi arbeitet mit 3,3 Volt-Logik. Das bedeutet, dass ein HIGH-Signal mit 3,3 Volt und ein Low-Signal mit 0 Volt dargestellt wird (vereinfach erklärt). Viele andere Schaltungen (Arduino!), Platinen, Bausteine arbeiten aber (noch) mit 5Volt-Logik. Das würde bedeuten, wenn an einem PC-Pin ein HIGH-Signal mit 5 Volt „rauskommt“, so würde man mit diesen 5 Volt in eine Rasberry-Eingang „reingehen“. Der RasPi „verträgt“ aber an seinen Eingängen eben nur maximal 3,3 Volt! Raspberry Pi serielle Schnittstelle mit PC oder anderem 5Volt Schaltkreis verbinden (z.B. Arduino) weiterlesen