Nachdem der neue Schaltregler verbaut war, galt es nun, erste Motor- und Fahrtests durchzuführen. Hier die Videos dazu:
Schlagwort: Motortest
Motortest mit STM-Board über die serielle Schnittstelle
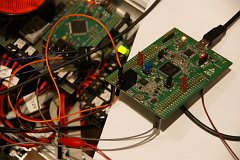
Mittlerweile wurde der Sourcecode vervollständigt, um alle vier Motoren per PWM und mit den jeweiligen Portbits anzusteuern. Hierzu die Fotos wo die Ansteuerung über den seriellen Port erfolgt:

Hier im linken Bild rechts unten sieht man die (rote) Platine, welche die USB-Verbindung zum steuernden Rechner darstellt. Von hier aus werden (gerade in einem Terminal-Programm) die seriellen Befehle gesendet. Das USB-Kabel am STM-Baord dient nur zur Stromversorgung (und zum Flashen):



PWM Ergänzung
Hier noch ein paar ergänzende Fotos zum hier beschriebenen PWM-Test mit dem STM32F4 DISCOVERY Board:

Kleiner Tipp noch für das Testen: Es schadet nicht, die verschiedenen Spannungen an den Kabeln zu beschriften.

Abschließend möchte ich hier noch ergänzen, dass es mir nicht gelungen ist, die Timer 1 und Timer 8 (TIM1 & TIM8) sowie die Timer 9 bis 14 bei gleichem Sourcecode dazu zu bewegen, die gleiche PWM-Frequenz auszugeben. Aus einem mir noch nicht klaren Grund, waren diese Timmer immer doppelt so schnell. Es funktionierte nur mit den „General-purpose timers (TIM2 to TIM5)“ einwandfrei. Die erste Vermutung, dass es teils 32-Bit- und teils 16-Bit-Timer bestätigte sich nicht. Wenn jemand einen Tipp hat, gerne als Kommentar hinterlassen!
Erste Tests mit dem STM-Board und dem Roboter
Die Arbeit mit dem STM-Board macht Fortschritte: Beim letzten Update wurde der Code für das ARM-Board derart aktualisiert, dass 2 Bits als Ausgänge definiert wurden. Diese wurden in fliegender Verdrahtung mit einander verbunden, so dass die Eingänge des Motorcontrol-Boards direkt am STM32F4-Board angeschlossen wurden. Interessant ist hierbei, dass das Motor-Board – entgegen den 3,3 Volt des STM-Boards – 5 Volt-Logik aufweist. Das geht jedoch in dieser Richtung, da die 3,3 Volt (HIGH) am Ausgang auch als HIGH vom Motorcontroll-Board akzeptiert werden weil sie innerhalb der Spezifikation liegen. Und so sieht das Ganze dann aus:

Nun wurde das das STM-Board per USB mit dem MacBook verbunden, ein Terminal-Programm gestartet, welches Befehle an das STM-Board sendet:

Und: Es fuktioniert! Der Motor 1 dreht in beide Richtungen entsprechend der seriellen Befehle – wie zuvor mit dem Atmel-Board. Und im Sourcecode wurden lediglich die neuen ARM-Ports angegeben und die Befehle zum Bit-Setzen und -Löschen angepasst. Als nächstes muss geprüft werden, wie bei dem ARM-Board PWM funktioniert, damit z.B. die Motorgeschwindigkeit Richtung Motorcontrol-Board „gesendet“ werden kann.
Das Gute an dem Motorcontrolboard: Die benötigte PWM-Spannung Vpwh kommt hier ebenfalls mit 3,3 Volt klar (min. 3,25 Volt). Die Versorgungsspannung des verwendeten Motortreiber ICs VNH2SP30-E benötigt jedoch mindestens 5,5 Volt und maximal 16 Volt – aber diese stehen auf dem Bot ja ohne weiteres zur Verfügung.
Motor Fehlersuche Finale
Wie es aussieht, weisen die Motorcontrol-Boards einen Defekt auf. Hier wurde nun eines der Boards bereits gegen ein neues ausgetauscht. Und *tusch* hier das Ergebnis:
Motor Fehlersuche Teil 4 und 5
Im letzten Video zeigte sich, dass anscheinend immer 12 Volt bei den Motoren ankommen, zumindest per Messgerät gemessen. Nun erfolgt der gleiche Test erneut, also mit Betrachtung der Portbits über die 7-Segement-Anzeige (die offenbar immer okay sind). mit angeschlossenen Messgeräten aber zusätzlich mit angeschlossenen Motoren. Hier das Ergebnis:
Ofenbar verhält sich das Motorboard anders, wenn die Motoren anschlossen sind und schaltet die 12 Volt nicht immer / nicht mehr korrekt. Um nun noch als letzte Fehlerursache die Motoren auszuschließen, wurde als nächstes das Ganze noch einmal mit einem Motor im Austausch getestet – mit dem Scheibenwischermotor im Vordergrund:
Das Finale ist nah…
PS.: Leider war es im Video etwas dunkel und man erkennt die Spannungen auf den Messgeräten nicht wirklich. Sorry.
Motor Fehlersuche Teil 3
Als nächstes galt es festzustellen, ob vielleicht die 12 Volt nicht durch die Motorcontrol-Boards nicht korrekt „geschaltet“ werden. Dazu wurden nun je Motor ein Messgerät angeschlossen und parallel die Ports über die 7-Segement-Anzeige beobachtet. Aber seht selbst:
Das Ergebnis ist noch nicht wirklich erklärbar. Anscheinend funktionieren die Motorcontrol-Boards korrekt. Die Motoren an sich waren aber okay. Fortsetzung folgt…
Motor Fehlersuche Teil 2
Bei der weiteren Analyse wurde nun die 7-Segement-Anzeige zu Signalisierung der Portbits parallel zum Motorboard it den Motoren angeschlossen. Wie man sieht, werden die Bits korrekt gesetzt, aber trotzdem bleibt gelegentlich ein Motor stehen:
Meanwhile: Motor Fehlersuche 1
Wie bisher berichtet, trat in der Zwischenzeit immer noch das Problem auf, dass bei gleichzeitiger Ansteuerung aller vier Motoren (was natürlich immer der Fall ist, das es ja ein Allrad-Roboter ist) immer mal wieder eines der Räder sich nicht dreht. Das Phänomen stellte sich mit allen Motoren reproduzierbar aber immer an verschiedenen Rädern / Motoren und immer zu unterschiedlichen Zeitpunkten auf.
Um herauszufinden, ob die Bits auch richtig vom Microcontroller gesetzt werden, wurden kurzerhand zwei Sieben-Segement-Anzeigen „missbraucht“ um die verschiedenen Stati anzuzeigen. Dargestellt werden hier die vier PWM-Bits (oben und unten) sowie die zwei Bits pro Motor, also acht Segmente. Hier das Video zur Dokumentation dazu:
Wie man sieht, ist hier als erstes ein Fehler aufgezeigt, der bei der Umstellung auf die neuen seriellen Befehle kopiert wurde: Beim „vorwärts“ fahren, werden die gleichen Bits gesetzt wie beim „links“ fahren. Das wurde natürlich als erstes nach diesem Video beseitigt – zeigt aber auch wie praktisch eine einfache Analyse mit direkter Anzeigt mit einfachen LEDs hier schnell Ergebnisse bringt.
Hier noch mal die 7-Segment-Anzeige und die Bedeutung der Segmente im Detail:

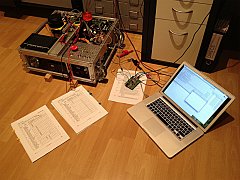
Zwischenschritt: Analyse von Motorverhalten
Beim Umstellen der seriellen Funktionen auf ASCII-Klartext-Anweisungen anstatt binärer Daten, stellte sich heraus, dass die Motoren nicht immer gleich auf die selben Anweisungen reagierten. Um sicher zu gehen, dass es kein Hardwarefehler ist – und weil ein Programmfehler nicht feststellbar war – wurde kurzerhand ein kleiner Analysestecker gebaut und alle Verbindungen insgesamt aufgetrennt um jedes elektrische Modul für sich sauber zu testen. Und so sah der Test dann aus:


Wie mah sieht zeigt die grüne LED den Zustand des betreffenden Portbits des Atmel an. Zum einfacheren Testen wurden einfach ein paar LEDs mit je einem 1,5 k Ohm Vorwiderstand gegen Masse auf den betreffenden Pfostenverbinder gelötet:


Das funktionierte offenbar wie gewünscht. Anschließend wurden umgekehrt die Eingänge der Motorcontrol-Boards jeweils per Drahtbrücken auf high gesetzt um zu sehen, ob die Motorcontrol-Boards beide ordentlich funktionieren. Das Wichtigste dabei: Eine ordentliche und aufgeräumte Testumgebung! ![]()

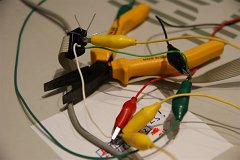
Spaß beiseite. Hintergrund dieser wilden Verkabelung ist natürlich, dass das Board "vor Ort" also in der Originalumgebung "im Roboter" getestet werden soll, also mit der gleichen Spannungsversorgung etc. Also wurde die Platinen nur soweit gelöst, dass man an die betreffenden Stecker ordentlich ran kommt und etwas unter die Platinen gelegt, damit es keine Kurzschlüsse gibt.
Nun wurden endlich auch die letzten Stecker und Kabel bei der Gelegenheit beschriftet – wo sowieso schon mal alles auseinander gebaut war:




Ergebnis: Interessanterweise wurde kein Fehler gefunden und nach dem Zusammenbau funktionierte alles wie gewünscht – ohne was geändert zu haben. Irgendwie seltsam… ![]()