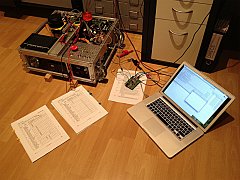
Die Arbeit mit dem STM-Board macht Fortschritte: Beim letzten Update wurde der Code für das ARM-Board derart aktualisiert, dass 2 Bits als Ausgänge definiert wurden. Diese wurden in fliegender Verdrahtung mit einander verbunden, so dass die Eingänge des Motorcontrol-Boards direkt am STM32F4-Board angeschlossen wurden. Interessant ist hierbei, dass das Motor-Board – entgegen den 3,3 Volt des STM-Boards – 5 Volt-Logik aufweist. Das geht jedoch in dieser Richtung, da die 3,3 Volt (HIGH) am Ausgang auch als HIGH vom Motorcontroll-Board akzeptiert werden weil sie innerhalb der Spezifikation liegen. Und so sieht das Ganze dann aus:

Nun wurde das das STM-Board per USB mit dem MacBook verbunden, ein Terminal-Programm gestartet, welches Befehle an das STM-Board sendet: