Da der Bot vorne, wo jetzt der Laserscanner hängt zuvor einen Infrarot-Sensor hatte – die Kabel also dort noch "hingen" – wurde der IR-Sensor kurzerhand mit einer kleinen Halterung versehen

un auf die Unterseite des Roboters montiert:


Da der Sensor ca. 80cm weit "schauen" kann, zeigt er nun immer schräg auf den Boden, in Fahrtrichtung nach vorne. Der Abstand zum Boden beträgt ca. 40 cm. Misst der Sensor diesen Abstand einmal mit mehr als 40 cm, "sieht" der Roboter auf einen "Abgrund" – z.B. Treppenstufen. In diesemFall ist durch die Software ein sofortiger Not-Halt vorgesehen (ist noch zu programmieren, aber wohl eher trivial). Also sozusagen, ein "Anti-Fall-Sensor".
Da sich die Hinterrad-Konstruktionmit zwei Möbelrollen als zu schwergängig erwies und den Wendekreis des Bot unnötig vergrößerte, wurde kurzer Hand aus dem Vier-Rad-Robot ein Drei-Rad-Robot. Eine Konstruktion, die sich ohnehin in der Praxis vielfach durchgesetzt hat:

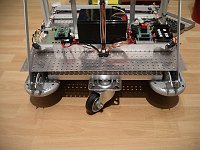
Anmerkung: Eine zweite Alustange ist vorgesehen, aber irgendwieging heute das Material aus. :-)