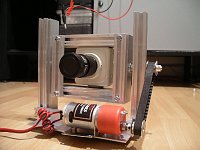
Ja, leider war nicht nur der Haltestrom durch die großen Schrittmotoren sehr stark, auch der Verlust allein durch Wärme (die Kühlkörper der Motoransteuerung wurden schlappe 38° warm) so enorm, dass der Entschluss gefasst wurde, auf bewährte Getriebemotoren umzusteigen. Der Antrieb sollte hierbei über Zahnräder und Zahnriemen gelöst werden. Nachteil: Genaue Position de r Motoren unbekannt. Vorteil: Die Halterung der Kamera konnte weiter verbessert werden:


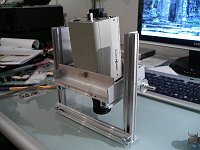
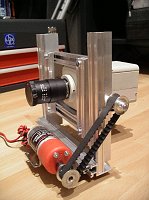
Wie sich herausstellte, war die hier gewählte Motorposition nicht ganz günstig, sollte der Roboter doch möglichst nah vor seine Räder schauen können. Da der Platz für den Motor aufgrund größtmöglicher Bewegungsfreiheit der Kamera nur wenige Positionen zulässt, wurde die Wahl auf ein neues Antriebssystem gelegt: Stahlzahnräder, die – wie so oft – noch individuell angepasst wurden. Wie immer alles gut dokumentiert:




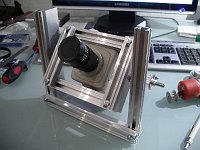
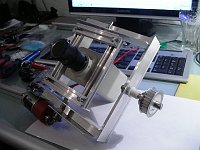
Gelagert wurde die Halterung auf einer 5 mm-Edelstahlachse mit ("Rundmetall") Kunststofflagerbuchsen und Stellringen:

Ein kurzes Video hierzu soll natürlich nicht fehlen. :-)
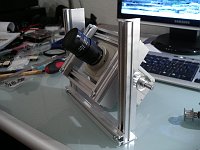
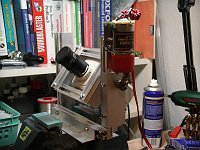
Nun musste noch die Pan (Schwenk) Halterung gelöst werden. Hier wurde eine 10 mm-Achse verwendet, damit das ganze noch stabiler ist:





Und wie immer, zurück auf den Bot, das ganze:





