Wie aus dem letzten Post vielleicht für den einen oder anderen zu erkennen, handelt es sich bei dem selbst gemachten Weihnachtsgeschenk um die Microsoft Kinect, die gerade vielfältig von sich reden macht. Denn eine Art 3D-Sensor in dieser Preisklasse schien vorher nicht recht möglich. Seit ein paar Tagen werden die gehackten und mittlerweile als Open Source verfügbaren Treiber, Libraries und Sourcecodes untersucht und ein wenig damit experimentiert. Hier die ersten Eindrücke:






Und hier das erste Erfolgserlebnis im etwas angepassten Sourcecode:
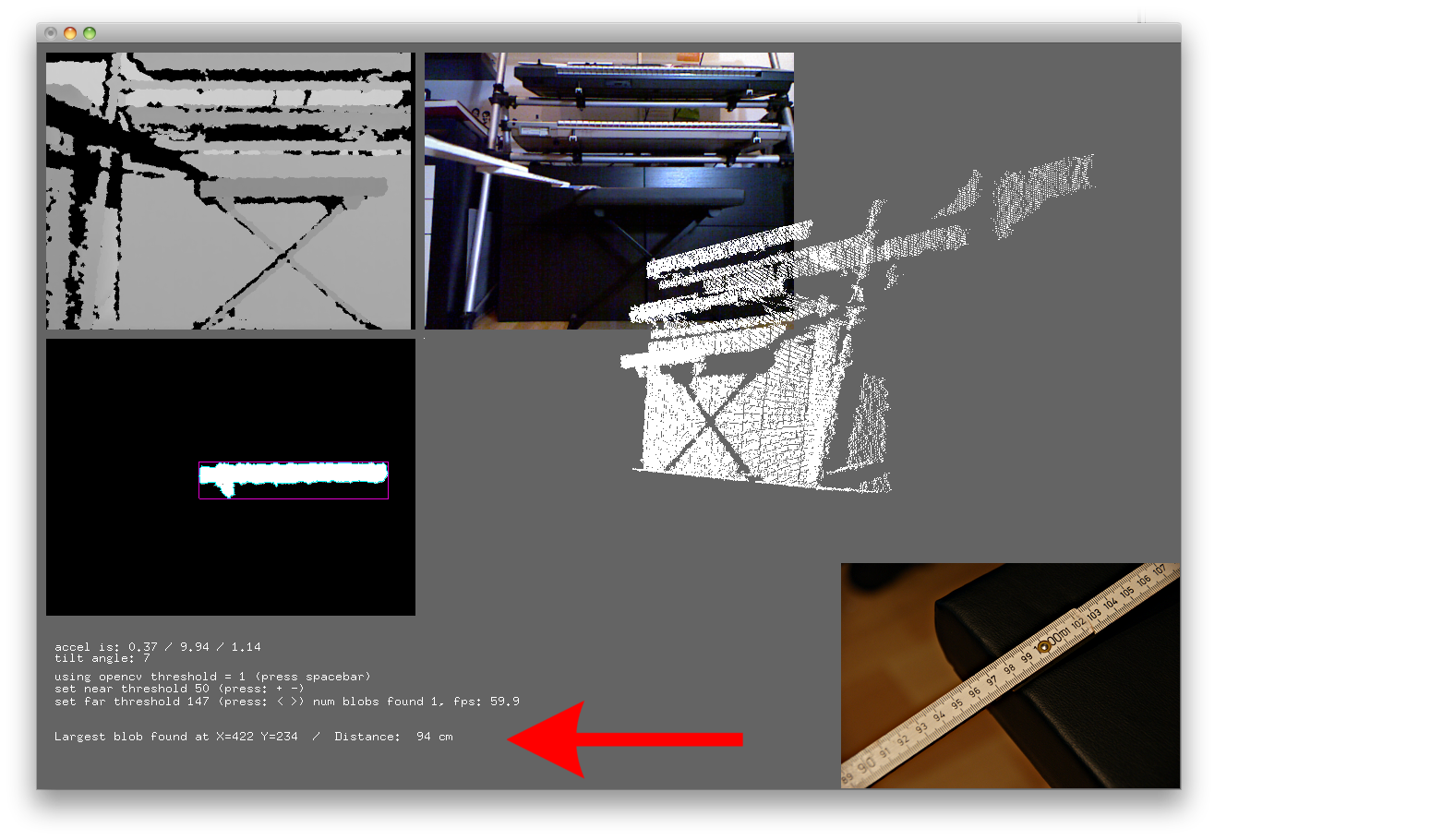
Wie man an der markierten Stelle sieht, wird hier schon ganz gut ein mögliches "Hindernis" für den Roboter angezeigt. Auf dem Live-Bild der Kamera rechts oben im Bild ist ein "Klavier-Hocker" zu erkennen. Der Sourcecode wurde so angepasst bzw. beim Programmstart so eingestellt, dass im Fenster links unten nur Objekte (Hindernisse) ab einer bestimmten Entfernung markiert (umrahmt) werden. Das Programm zeigt das größte Hindernis an, erkennt nun deren Mittelpunkt innerhalb des Bilders (X/Y-Koordinaten) und zeigt auch den Abstand des Objektes an. Und das beste: Das läuft soweit bereits unter Mac OS und unter Linux.
Genutzt wurde dazu der als Open Source verfügbare Treiber / die Library OpenKinect. Ergänzt um openFrameworks und ofxKinect. Vorteil dieser Lösung ist, dass sie unter Windows, Linux und Mac OS läuft. Ein Nachteil dieser Lösung könnte sein: Es gibt zwar einen Wrapper für das Qt Framework, welches von mir genutzt wird, aber da fehlen sämtliche OpenCV Elemente, die bei der openFrameworks Lösung alle schön beinhaltet sind. Da ist also noch etwas Analyse erforderlich, wie das ganze zusammenzubringen ist. :-) Es wird nicht langweilig…