Wie gestern auf Twitter angekündigt, ging es weiter mit der Verkabelung meines neuen minibot. Und das konnte endlich abgeschlossen werden! Der aktuelle Stand soll natürlich wie immer hier dokumentiert werden. Und warum mich ein Nicht-Rastermaß sehr genervt hat, sieht man auch später. Aber der Reihe nach.
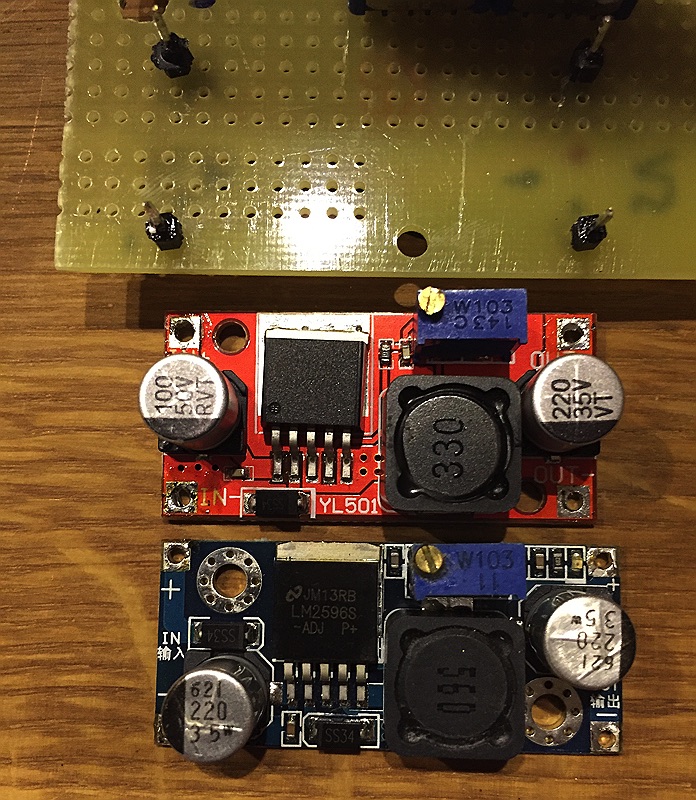
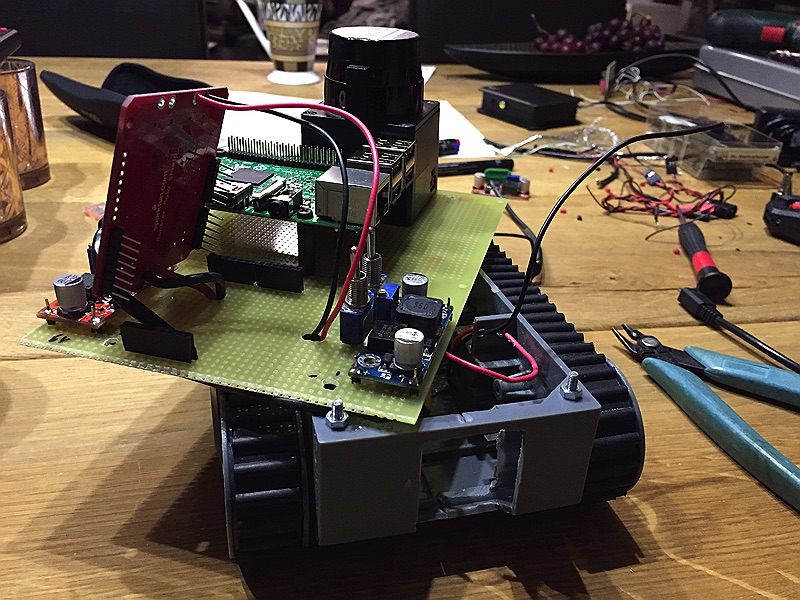
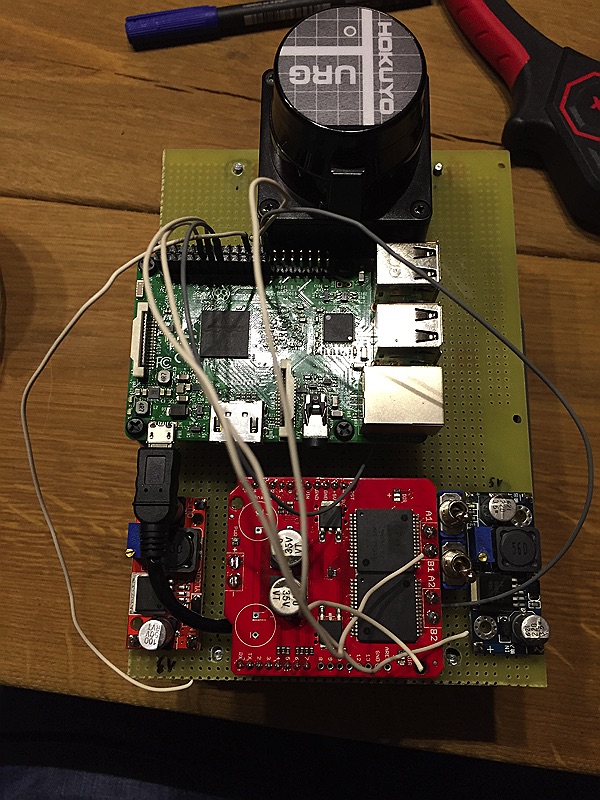
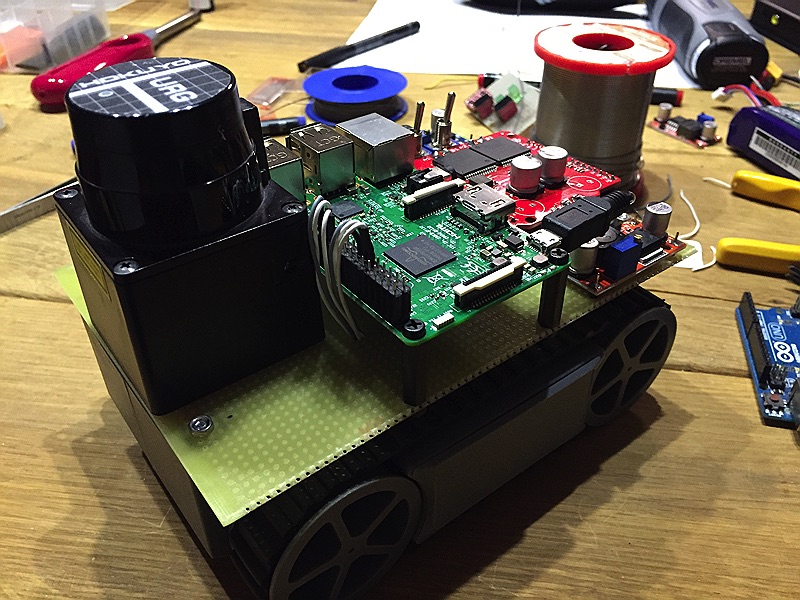
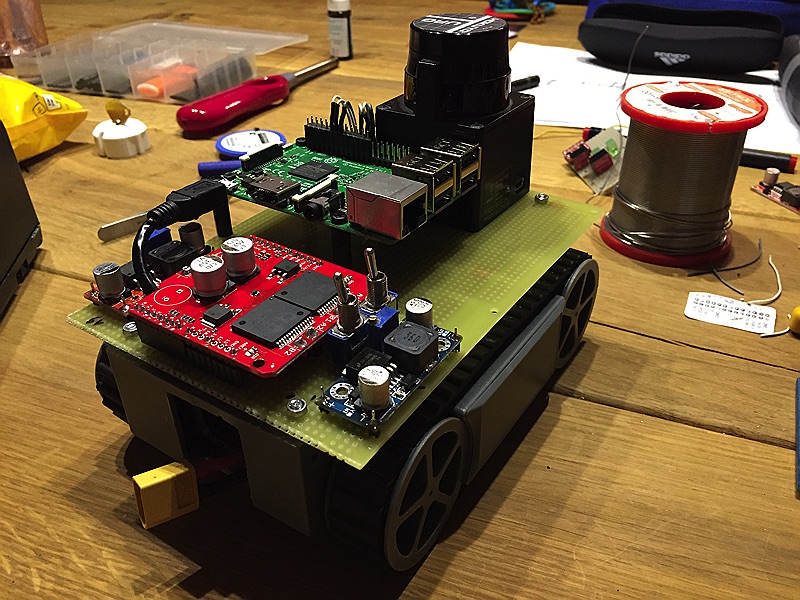
Aus bisher nicht erklärbarem Grund, funktionierte der „rote“ Schaltregler oben im Bild nicht mit dem Raspberry Pi, die Spannung brach komplett zusammen. Er wird auf dem Roboter benötigt, um die Akkuspannung von ca. 12 Volt auf 5 Volt herunterzuregeln. Leider war die funktionierende blaue Platine ein kleines Stück länger, so dass neue Löcher in die Platine gebohrt werden mussten.
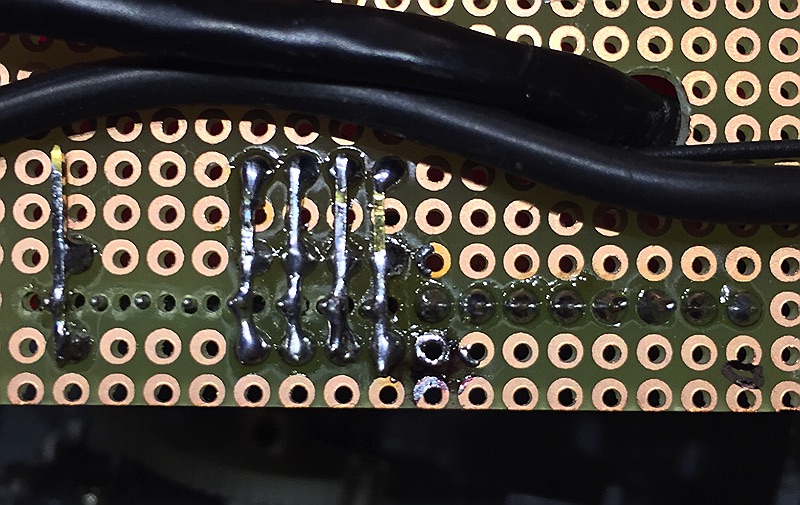
Die Unterseite sieht vielleicht nicht hübsch aus, tut aber was sie soll.
Das Monster Moto Shield benötigt für die Motoren 6 Volt als Stromversorgung. Das ist auch der Grund, warum der Roboter zwei Schaltregler aufweist: Einen für die 5 Volt (Raspberry Pi) und einen für die 6 Volt (Motoren).
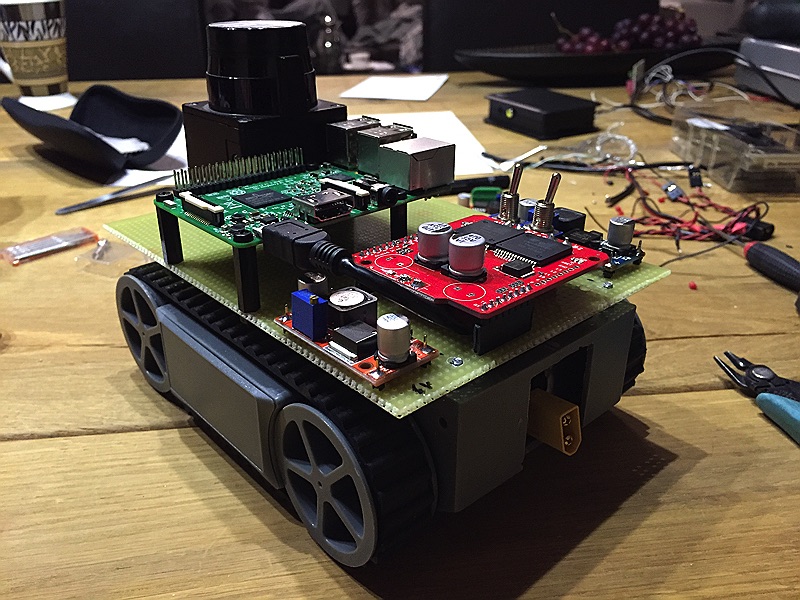
Dann schauen wir mal, ob alles läuft…?
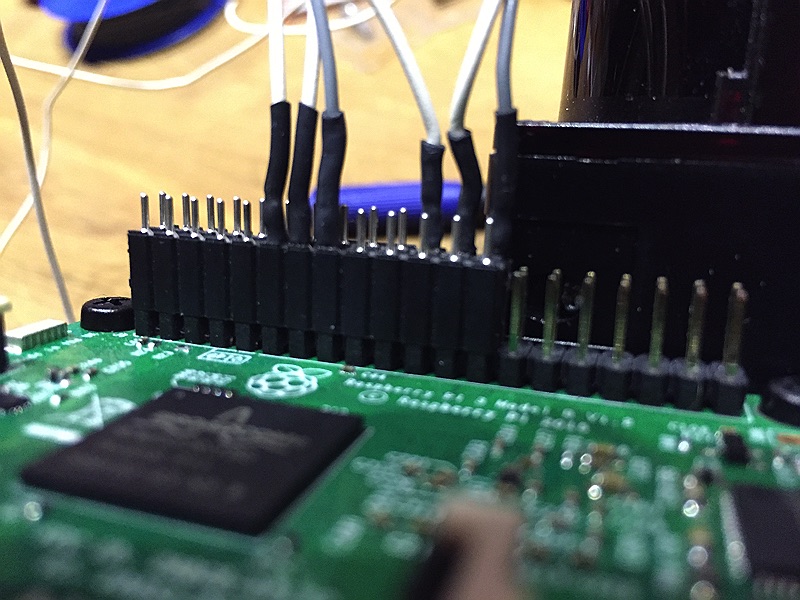
Sieht gut aus. Nun noch die Pins vom Raspberry Pi (sogenannte GPIOs) mit dem Motor Shield verbinden – schließlich müssen ja irgendwie die Bits gesetzt werden, damit die Motoren an, aus und schnell oder langsam „geschaltet“ werden.
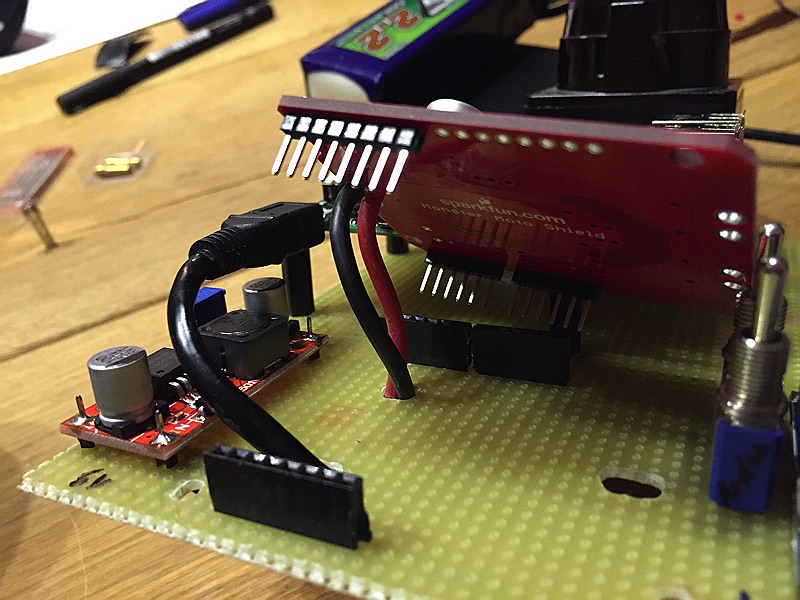
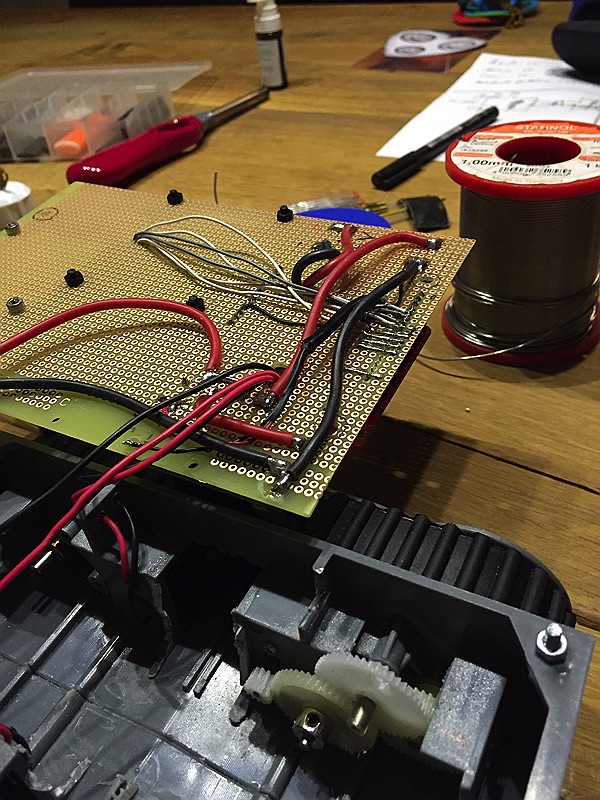
Pro Motor werden zwei Pins benötigt, plus einen für die Geschwindigkeit mittels PWM (Pulsweitenmodulation). Hier die Seite des RasPi:
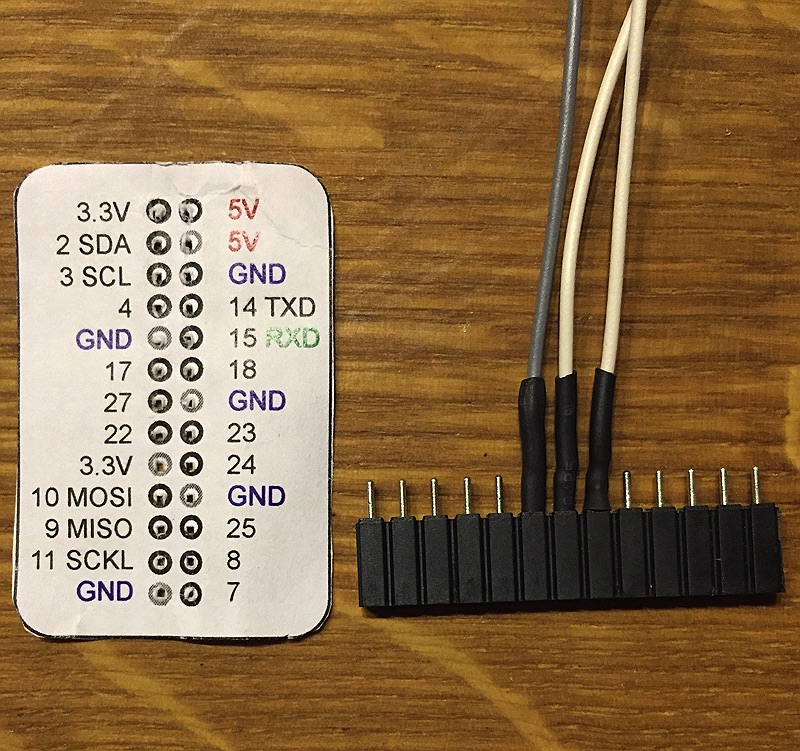
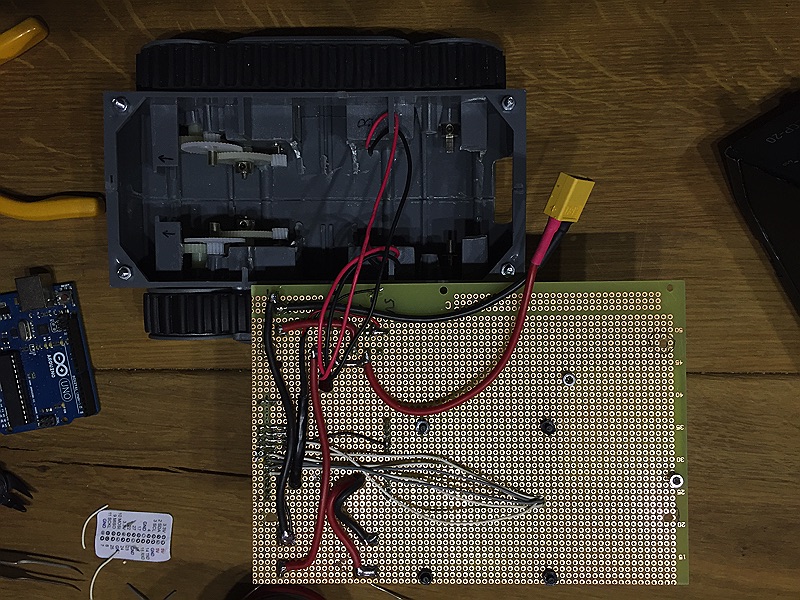
Und hier sollen die Leitungen hin – wenn auch auf der Unterseite der Platine. Sieht ja später besser aus:
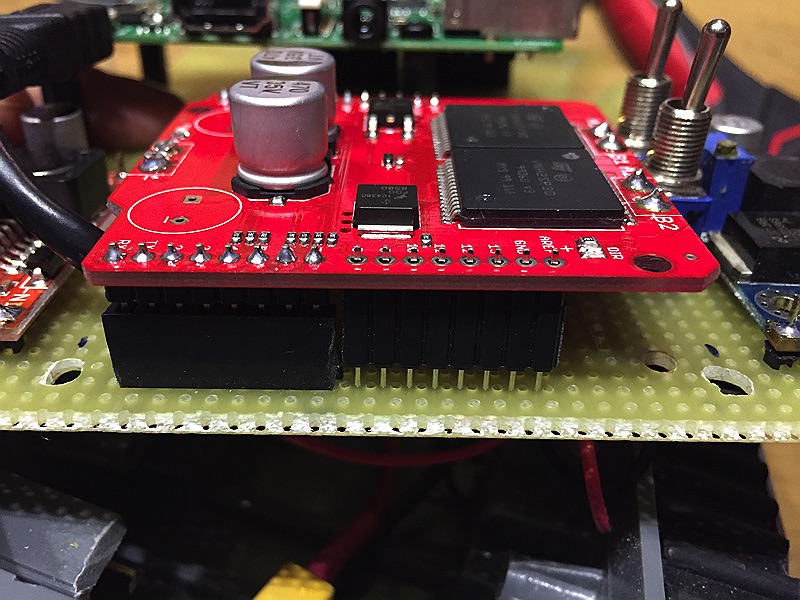
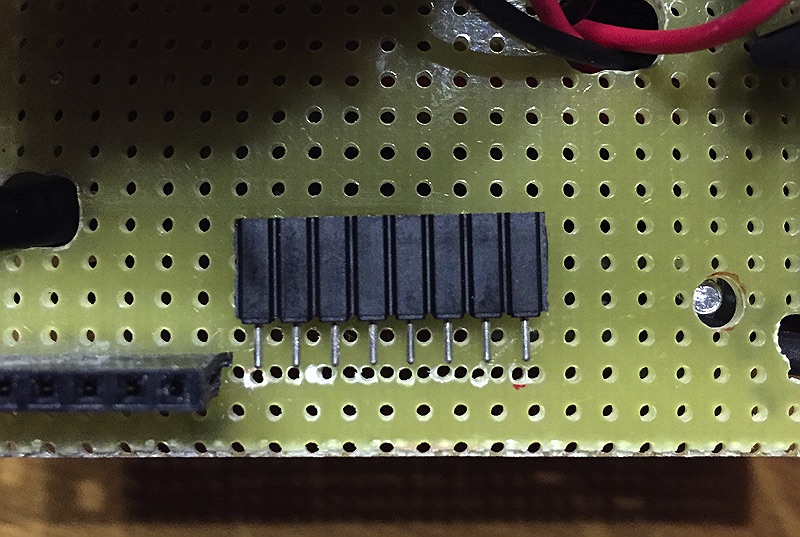
Aber was ist das? Ach ja! Damit man die eigentlich für den Arduino gedachten Shields nur in eine Richtung auf diesen stecken kann, ist zwischen den Buchsen ein etwas größerer Abstand als das Standard-Rastermaß von 2,54 mm (1/10″). So wird das also nix:
Dremel ist mal wieder dein Freund:
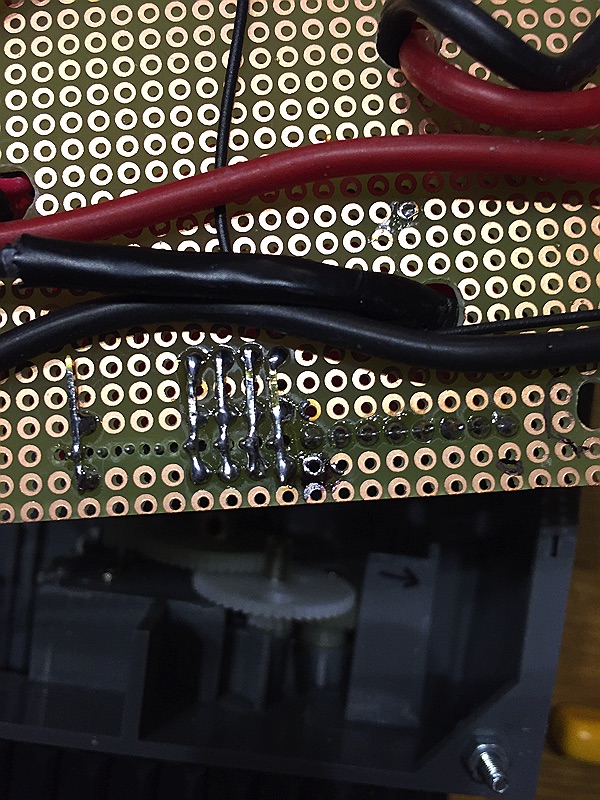
Tja, nur so eingelötet, wird das ein ordentlicher Kurzschluss:
Also, Lötstation auf 370° C eingestellt, Lötkolben etwas im Lötauge hin und her bewegt, und zack, raus sind die Kontakte:

Da die Buchse des Shields nun nicht mehr halten würde, wenn man es herauszieht, wird noch etwas weiter gelötet „gebraten“:
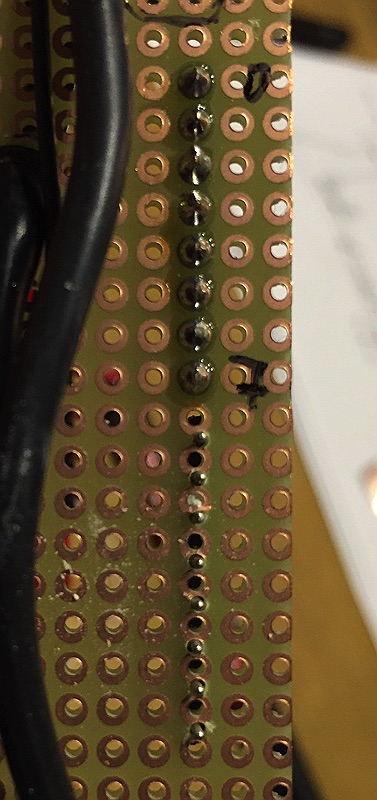
An diese neu geschaffenen Kontakte kann endlich die Litze zu den GPIOs angelötet werden:
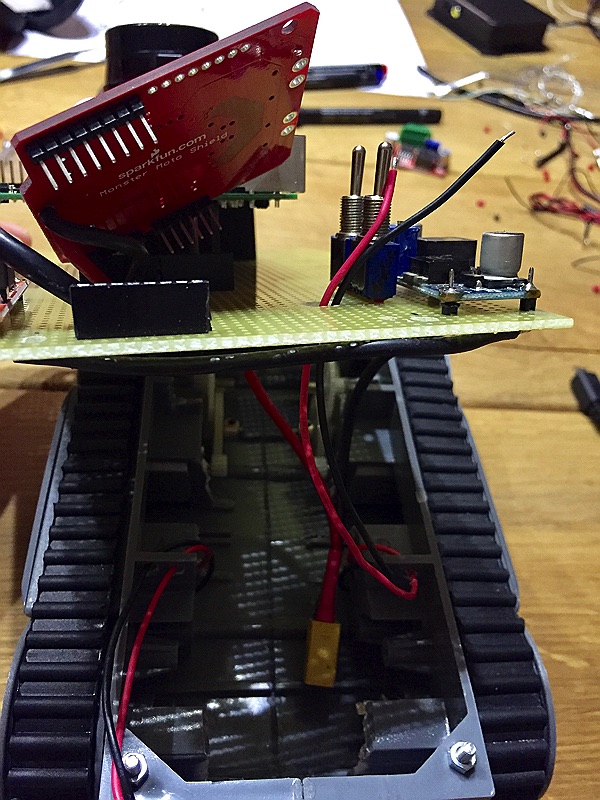
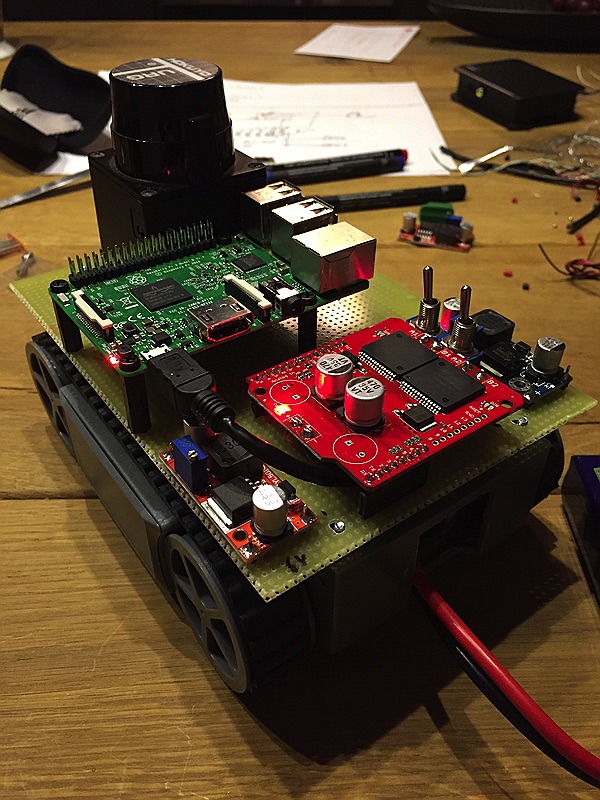
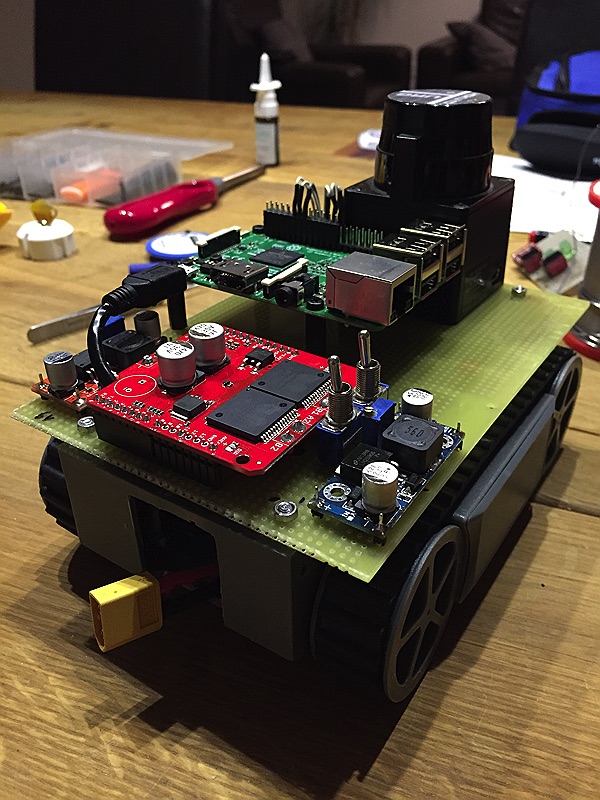
Tadaa! Es ist vollbracht:
Und nochmal hochkant:
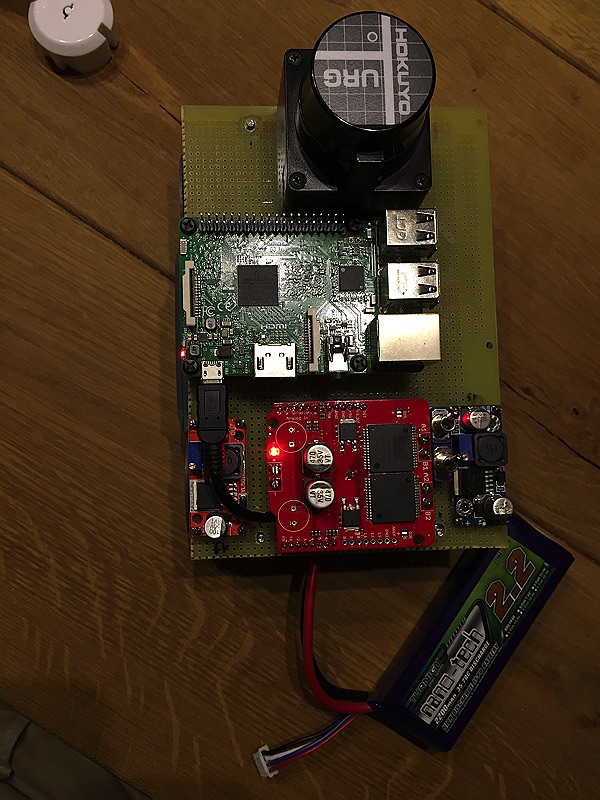
Nun muss ich mich weiter mit der grauen Theorie, also ROS, beschäftigen. Wobei erstmal die Motoransteuerung manuell, vermutlich mittels RPi.GPIO getestet wird…
das motorshield ist nicht im raster, weil es für ein arduino gedacht ist, ich rege mich jedesmal über die 1,27mm auf :D
manche biegen die pins dann vorsichtig in die richtung.
auf ros bin ich mal gespannt.
Das schrieb ich ja. :)
…ich auch! Man muss ja Ziele haben…