Nachdem nun das Motor Shield läuft, die Omniwheel-Plattform zusammengebaut wurde und die Apple Remote zum Laufen gebracht wurde, galt es nun, alles gemeinsam zu testen.
Als erstes wurde ein LiPo-Akku hinzugefügt und mit einem StepDown-Regler von Pololu verbunden. Übergangsweise wurde hier noch ein „kleiner“ 5 Ampere-reger verwendet.
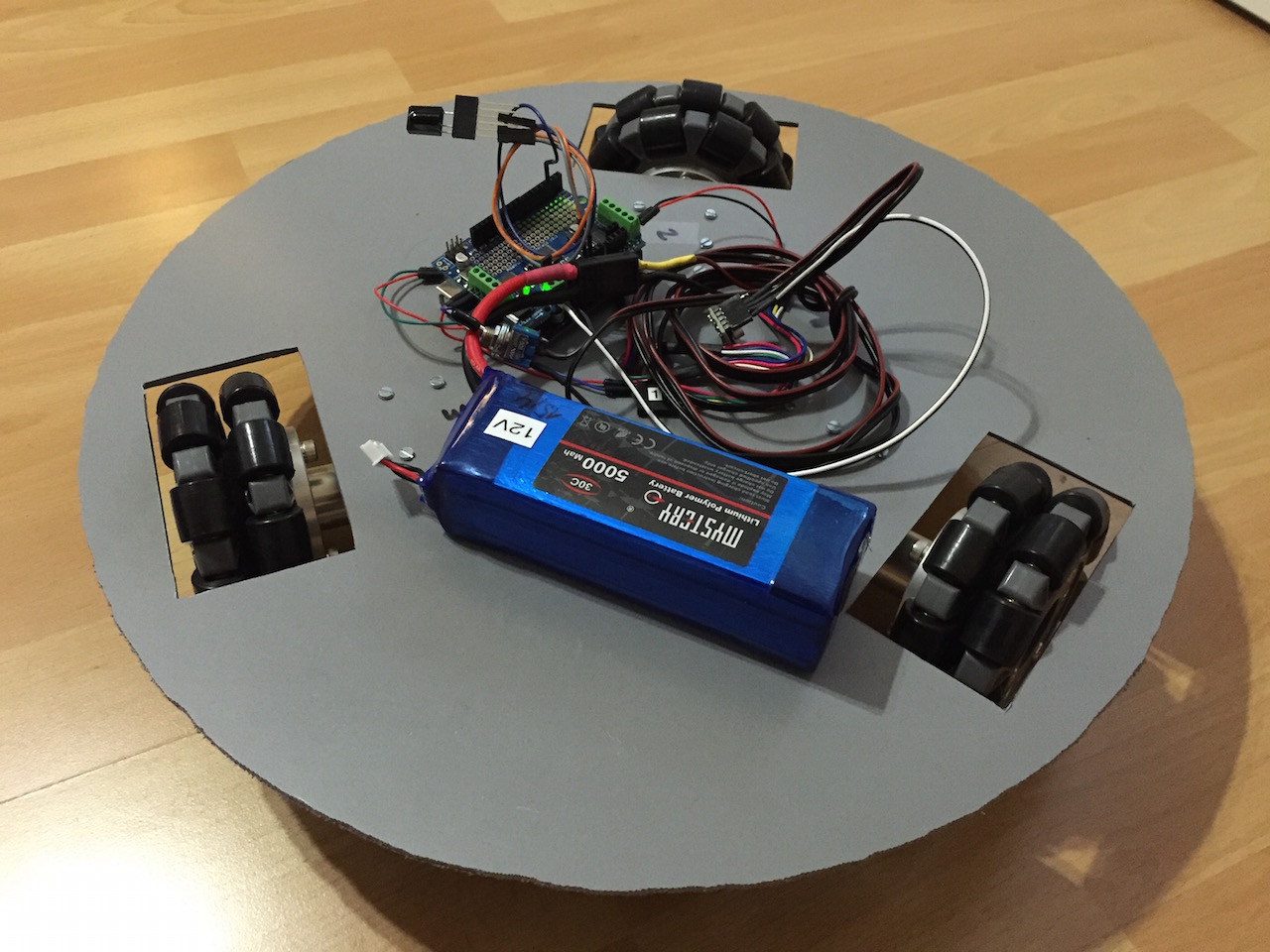
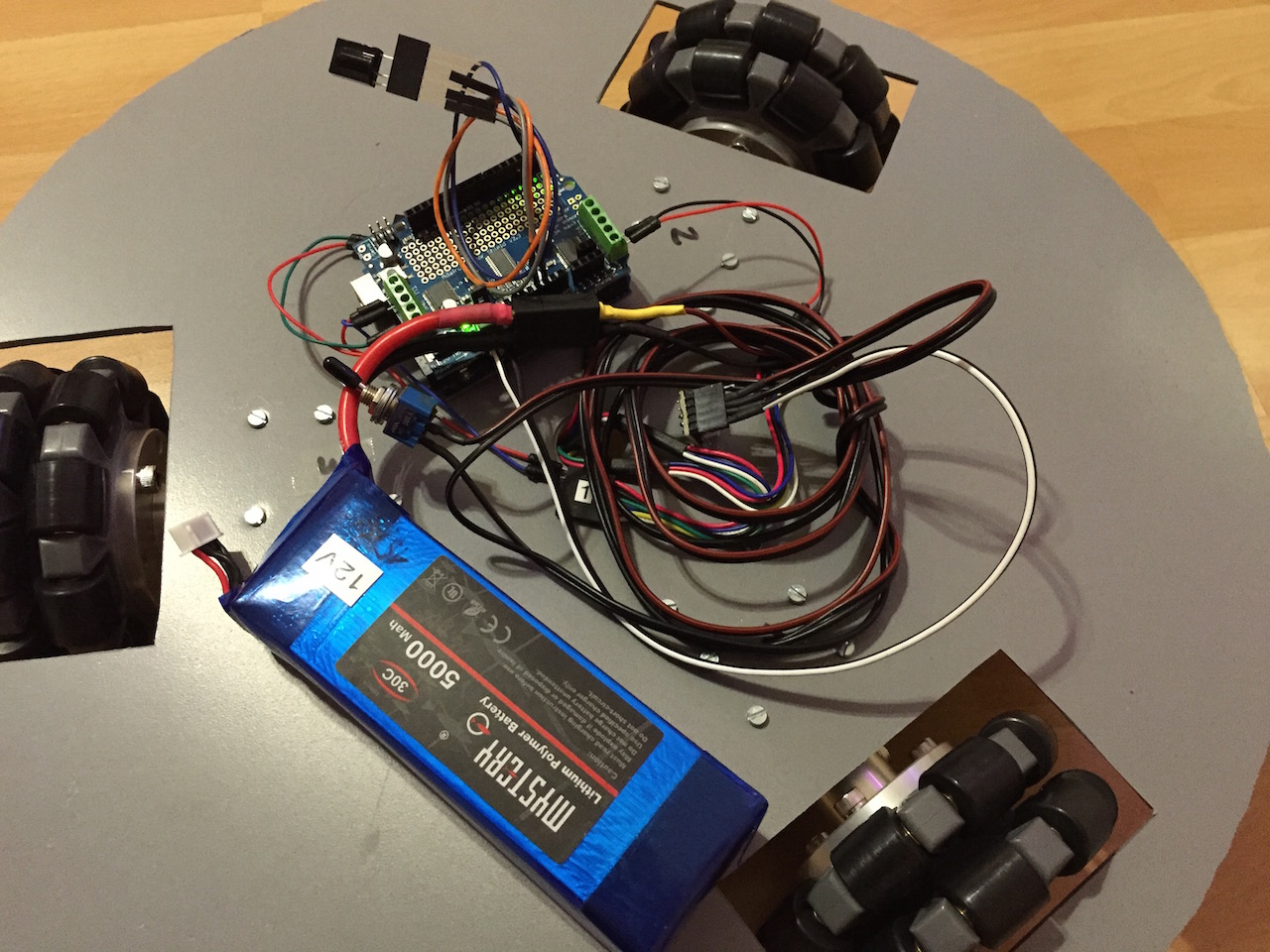
Danach wurde das Ganze provisorisch miteinander verbunden:
Und natürlich darf auch hier das obligatorische Video nicht fehlen:
Die Geschwindigkeit der Motoren ist im Video noch runter geregelt.