Beim Testen des Atmelboards außerhalb des Roboter fiel auf, dass es manchmal bei der seriellen Übertragung nach einiger Zeit timeouts gab. Die Ursache lag im Atmelcode für den Micromag 3D-Kompass. Dieser initialisiert beim ersten Start des Atmels das SPI / I²C Protokoll. Danach fragt das direcs-Hauptprogramm den Atmel nach den Kompassdaten. Ist das Kompassmodul aber nun gar nicht mit dem Atmelboard verbunden, so kommt es zu den timeouts, da im SPI-Code auf bestimmte Bitzustände gewartet wird.
Um dieses zu verhindern und hiermit auch eine weitere Sicherheit einzubauen, wird nun beim Abfragen der Kompasswerte jedesmal geprüft, ob ein bestimmtes Portbit gesetzt ist. Dieses Portbit ist durch einen 100k-Widerstand am Atmelboard standardmäßig auf Masse gezogen. Wird das Kompassmodul nun per Falchbandkabel angesteckt, wird diese Leitung vom Kompassmodul aus auf 5V "hoch gezogen".
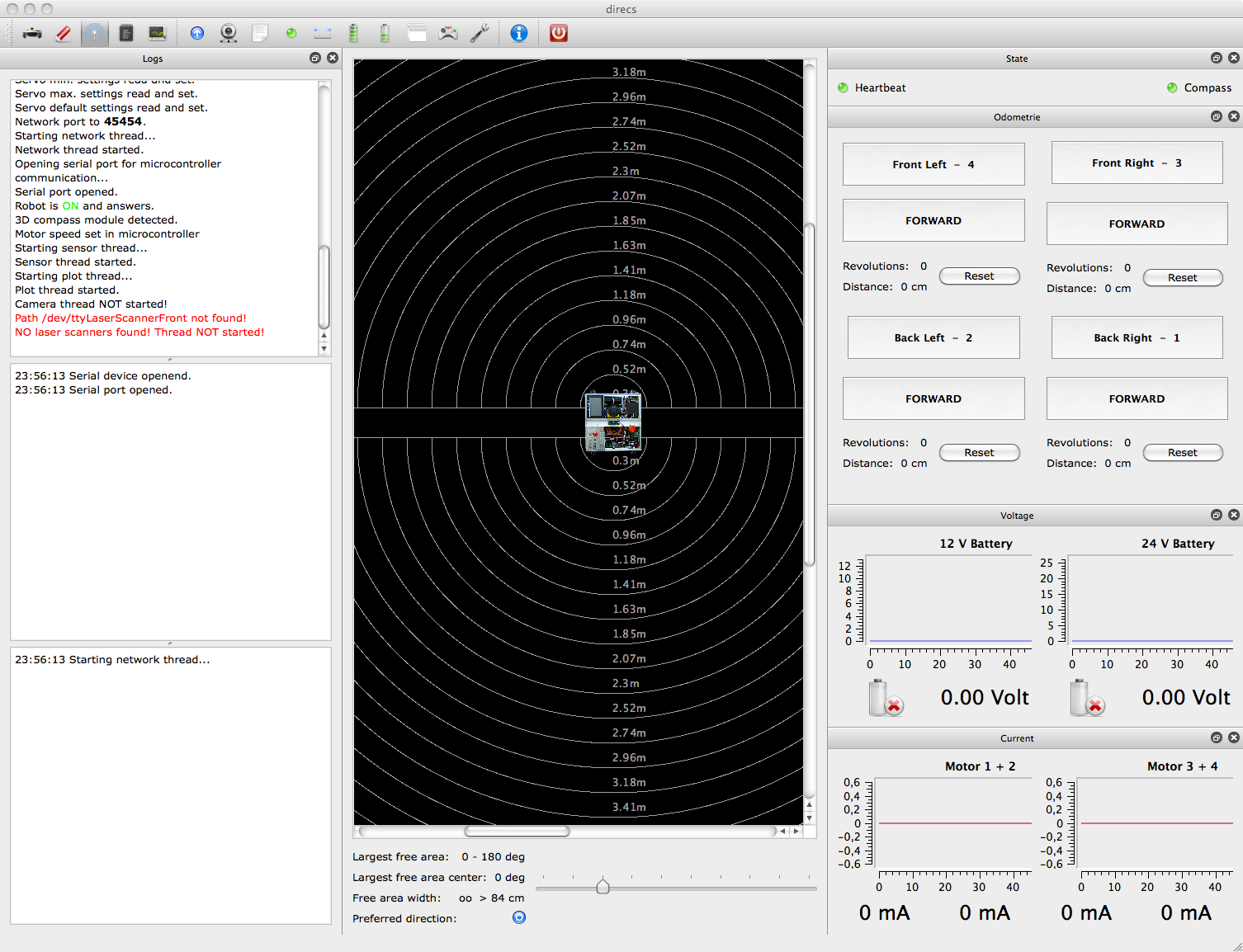
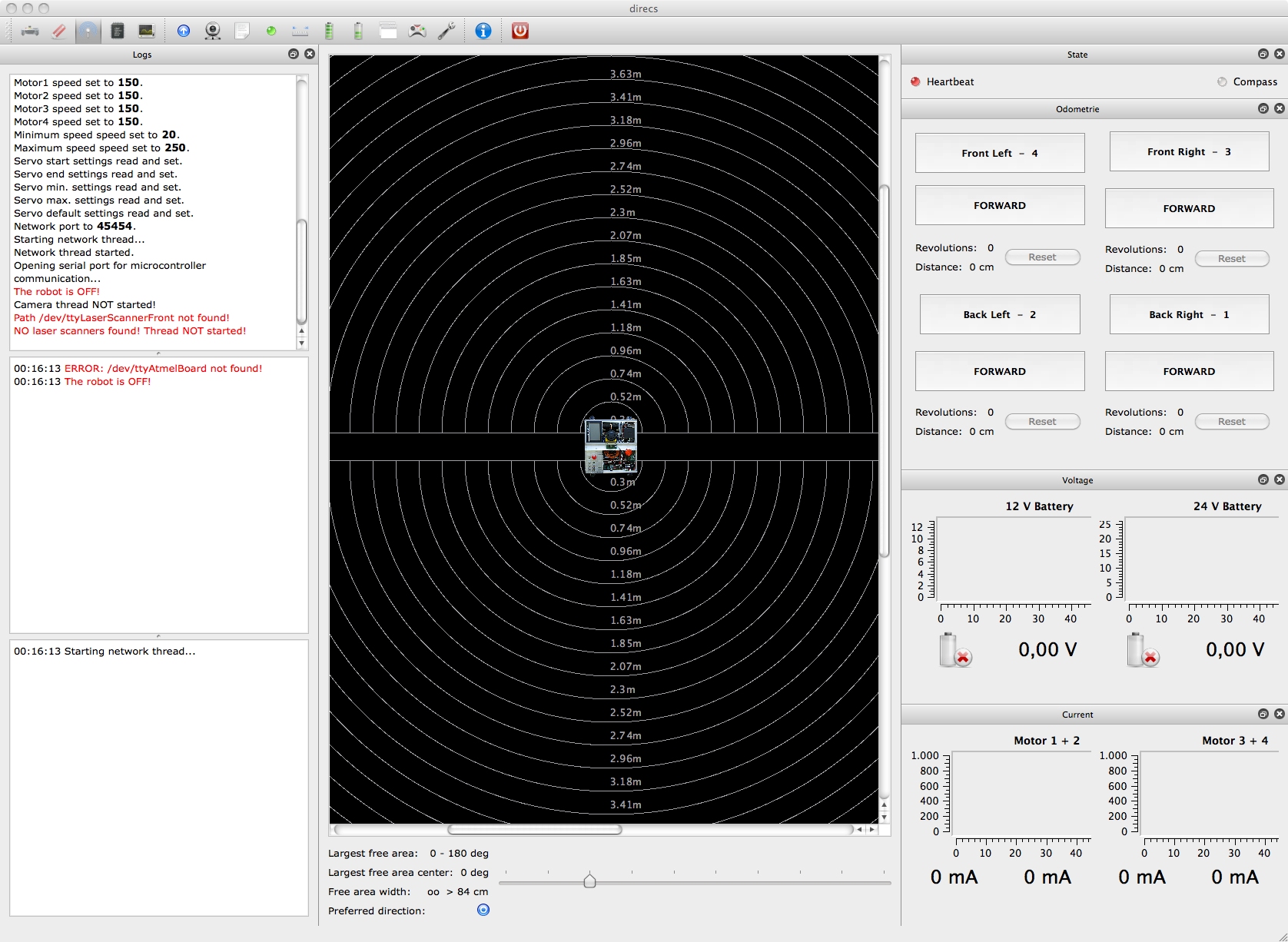
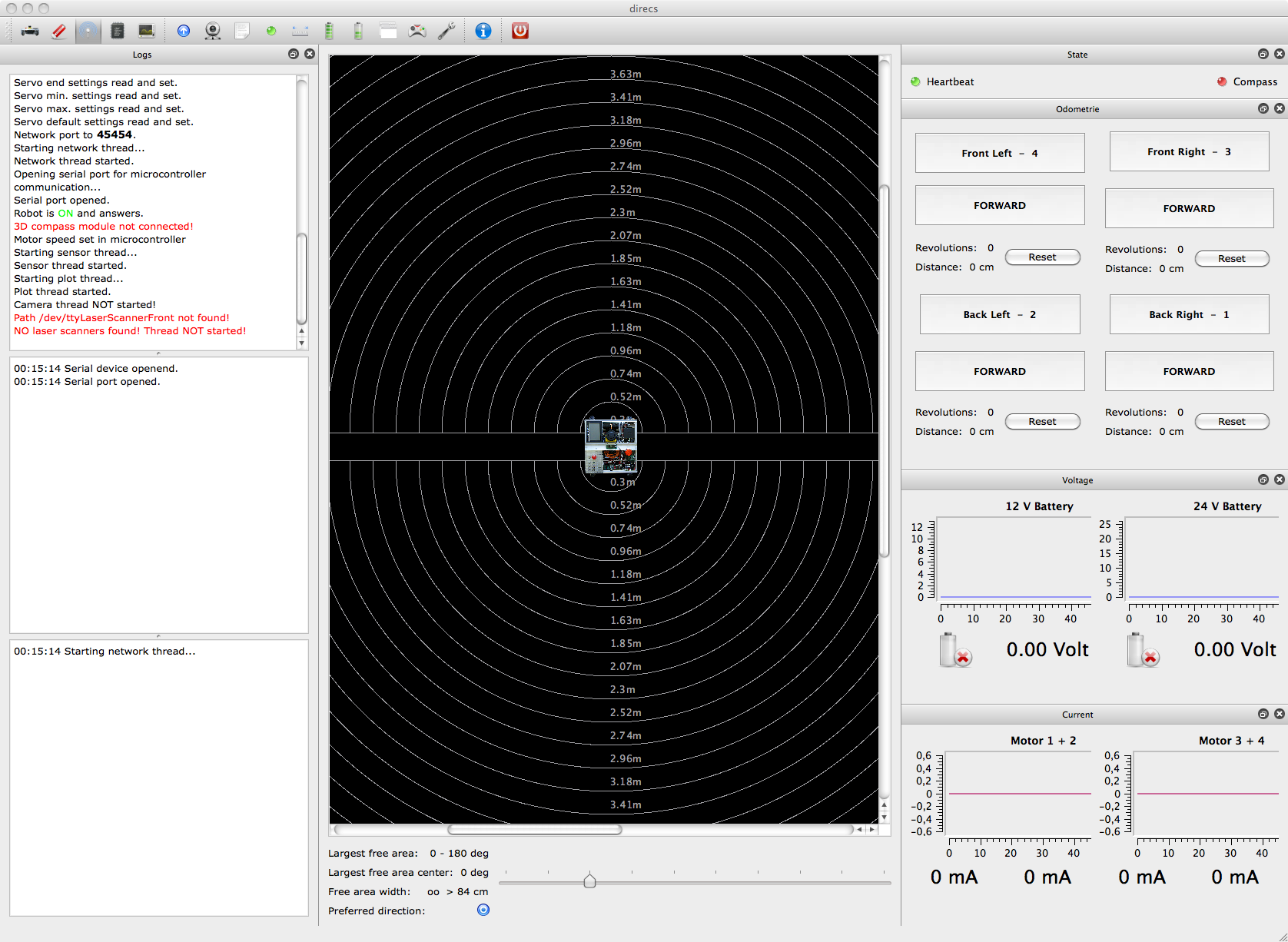
Bei der Initialisierung des Atmelboards bzw. der Prüfung ob der Roboter eingeschaltet ist im direcs-Hauptprogramm, wird nun auch zusätzlich abgefragt, ob das Kompassmodul verbunden ist. Dieses wird auch in der GUI grafisch mit einer weiteren LED (rechts oben im Bild) angezeigt.
Atmel-Board gar nicht verbunden (Kompass damit natürlich auch nicht):
Atmel-Board verbunden, Kompassmodul nicht angeschlossen:
Atmel-Board verbunden, Kompassmodul ebenfalls angeschlossen: