Wenn mein aktuell gebauter minibot mit vier Rädern sich um die eigene Achse drehte, kam es oft vor, dass eines der Räder blockierte. Dies ist abhängig vom Untergrund und der Geschwindigkeit.
Da der Antrieb des Roboters ohnehin demnächst geändert werden soll, habe ich mich entschlossen hier schon mal vorzugreifen und ein Lenkrad statt der beiden Hinterräder einzubauen. Goodbye Allradantrieb!

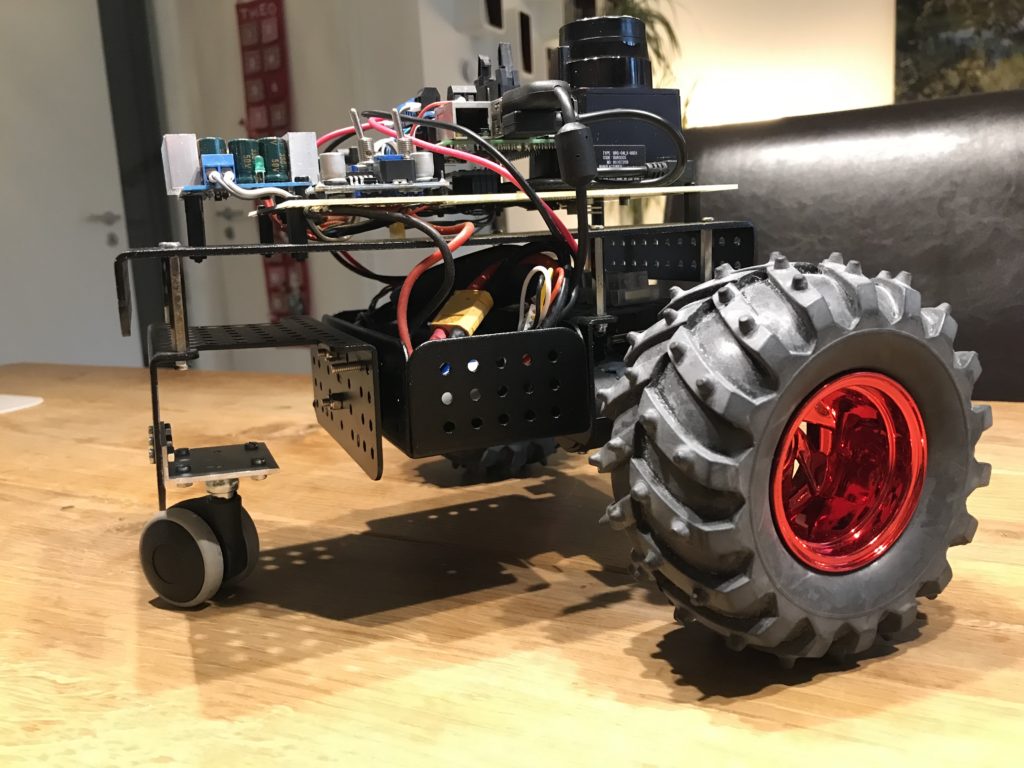
Damit ist der Bot zwar nicht mehr so geländegängig, aber er wird ja nicht wirklich draußen fahren und Teppichkanten kam er mit dem neuen Hinterrad auch hoch.
Hier das üblich Video zum aktuellen Stand:
Man sieht im Video deutlich, wie unregelmäßig die Motoren arbeiten und der Bot dadurch nicht wirklich geradeaus fährt. Hier kommt mit dem neuen Antrieb dann hoffentlich Besserung ins Spiel.
Hi, wird der Bot über Geschwindigkeiten angesteuert? Zum Beispiel: cmd_vel? Oder läuft “nur” ne Funktion à la “Joystick vor” —> “MotorL,255” + “MotorR,255” ?
Ich hatte für meinen Bot mal ‘n package mit integrierten PID Regler für Raddrehgeschwindigkeiten.
Dann fährt er auch “besser” geradeaus! ;) Vernünftige Konfiguration vorausgesetzt! 😂
Gruß Thomas
Deine Frage war sehr gut, Thomas. :)
Sie hat mich endlich dazu bewegt, das Thema cmd_vel anzugehen. Den bisher habe ich die Motoren tatsächlich mit fester Geschwindigkeit gefahren.
Ich habe jetzt einen develop-Branch angelegt und die Joystick-Steuerung fast fertig auf cmd_vel umgestellt. Und dann natürlich auch über die Gamepade-Achsen und nicht mehr über das Steuerkreuz. Siehe auch aktuelles Launch-File: https://github.com/markusk/minibot/blob/develop/ROS/catkin_workspace/src/minibot/launch/minibot.launch
Hi, ich bin dabei ein FTS zu entwickeln und mich in ROS einzuarbeiten. Ich verwende dazu Mecanumräder. Habe in den Beschreibungen nix dazu gefunden. Daher habe ich eine Fragen an Dich.
Hast Du mit Mecanum Erfahrung und könntest mir Tips geben?
Muss ich bei Mecanum an jedes Rad einen Drehgeber installieren. oder würdest Du das anders lösen.
Ich habe mit ROS und Mecanum-Rädern leider noch keine Erfahrung sammeln können. Ich vermute aber, dass jedes Rad einen Drehgeber benötigt, da ja viele individuelle oder spezielle Fahrtrichtungen möglich sind.
Witzig, das Problem der blockierenden Ränder hat mein WIld Thumper nicht. Welche Übersetzung bei den Motoren hast du denn genommen? Überhitzen bei dir die Motoren oder deren Treiber? Ich habe dein Setup nur überflogen, aber wenn du die TB6612 MOSFETs verwendest sind die für die Wild Thumper Motoren natürlich etwas unterdimensioniert, da die Motoren kurzzeitig bis zu 6.5A ziehen können. Also mein Tipp wäre z.B. einen VNH5019 zu nehmen, gibts als Breakout von pololu.
Und noch eine andere Frage: Wie hast du die Federung so hinbekommen, dass deine hintere Achse waagerecht ist?