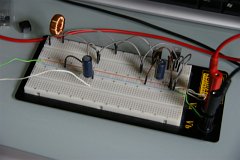
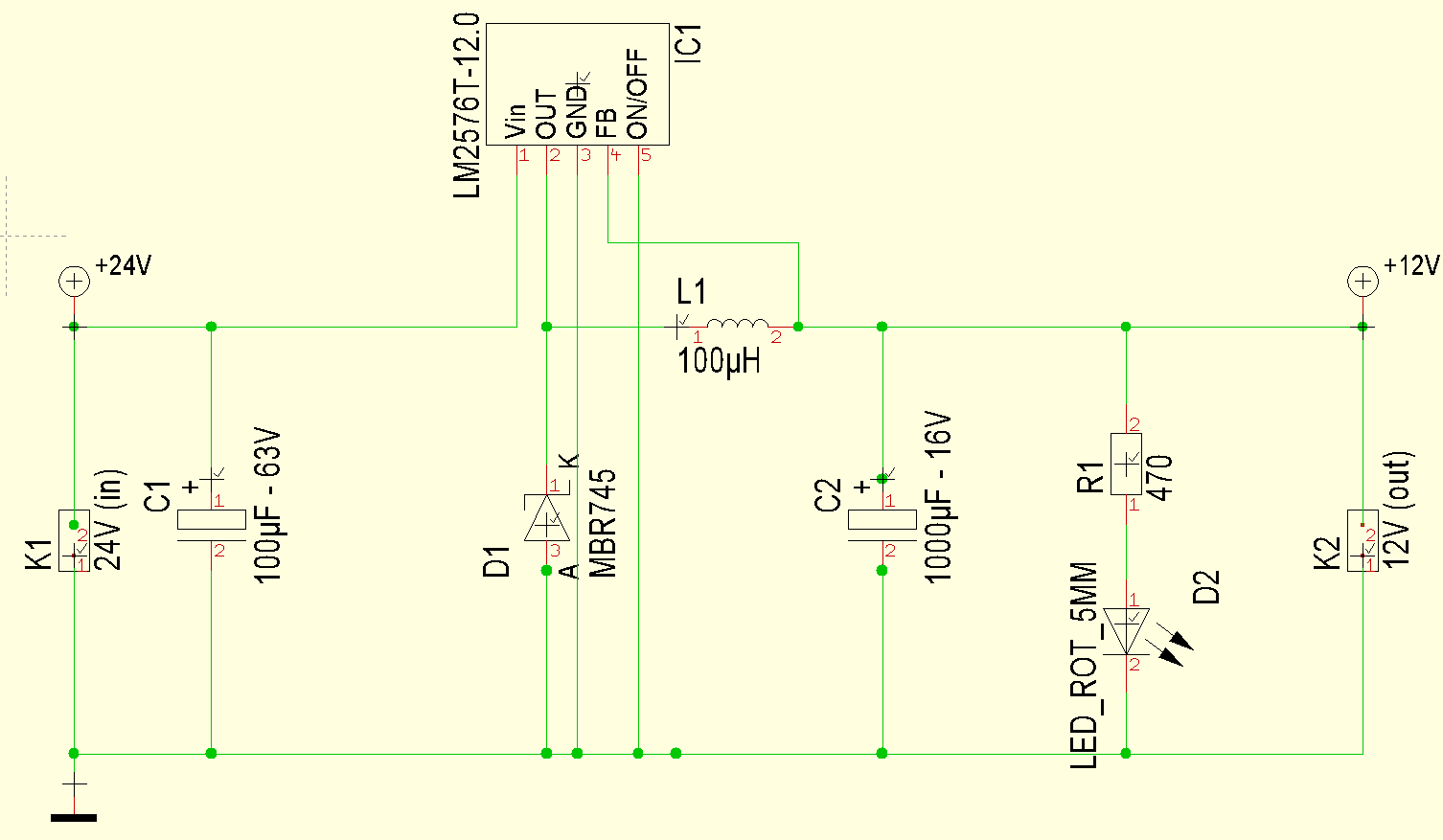
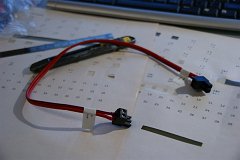
Nach mehreren Aktionen, bei denen die Akkus des Roboters genau dann leer waren, wenn man ihn mal vorführen wollte, wurde nun endlich eine einfache Akku-Überwachung über die AD-Wandler des Atmel-Prozessors hinzugefügt. So sieht die Schaltung aus:

Wichtig dabei ist es, das Poti/den Trimmer vorher so einzustellen, dass an dem Atmel-AD-Wandler-Eingang maximal 2,56 V anliegen! Wie immer gilt: Ein Nachbau erfolgt auf eigene Gefahr!
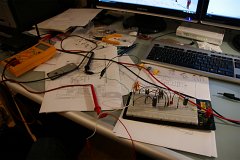
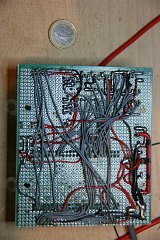
Und das sind die Tests und Messungen:


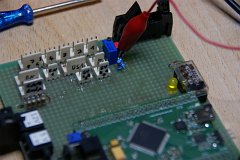


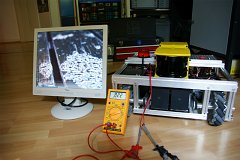
Nun noch die 24V aus das zentrale Controller-Board gelegt, die Ad-Wandler "verkabelt" und die Messwerte mittels Netzteil überprüft:



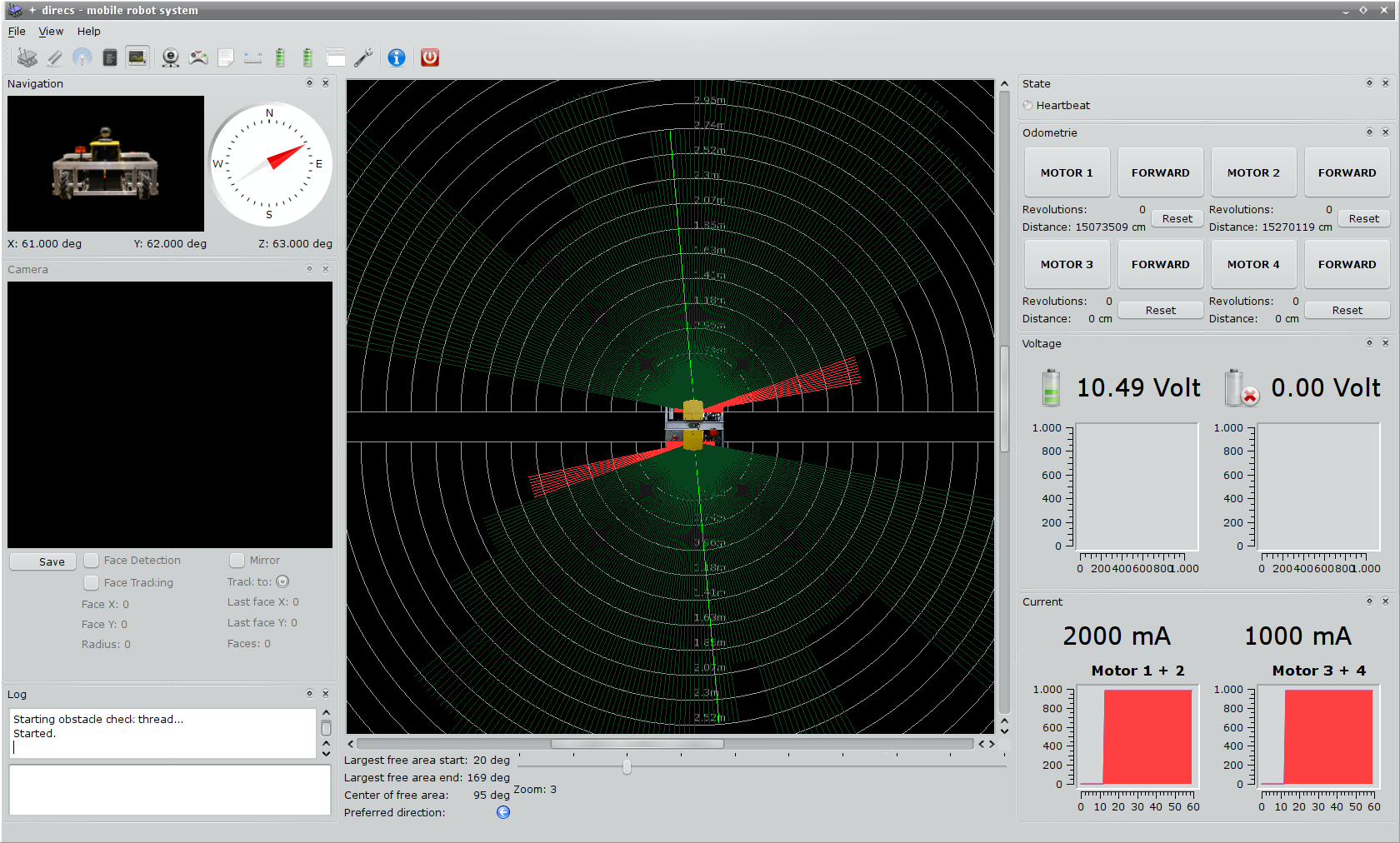
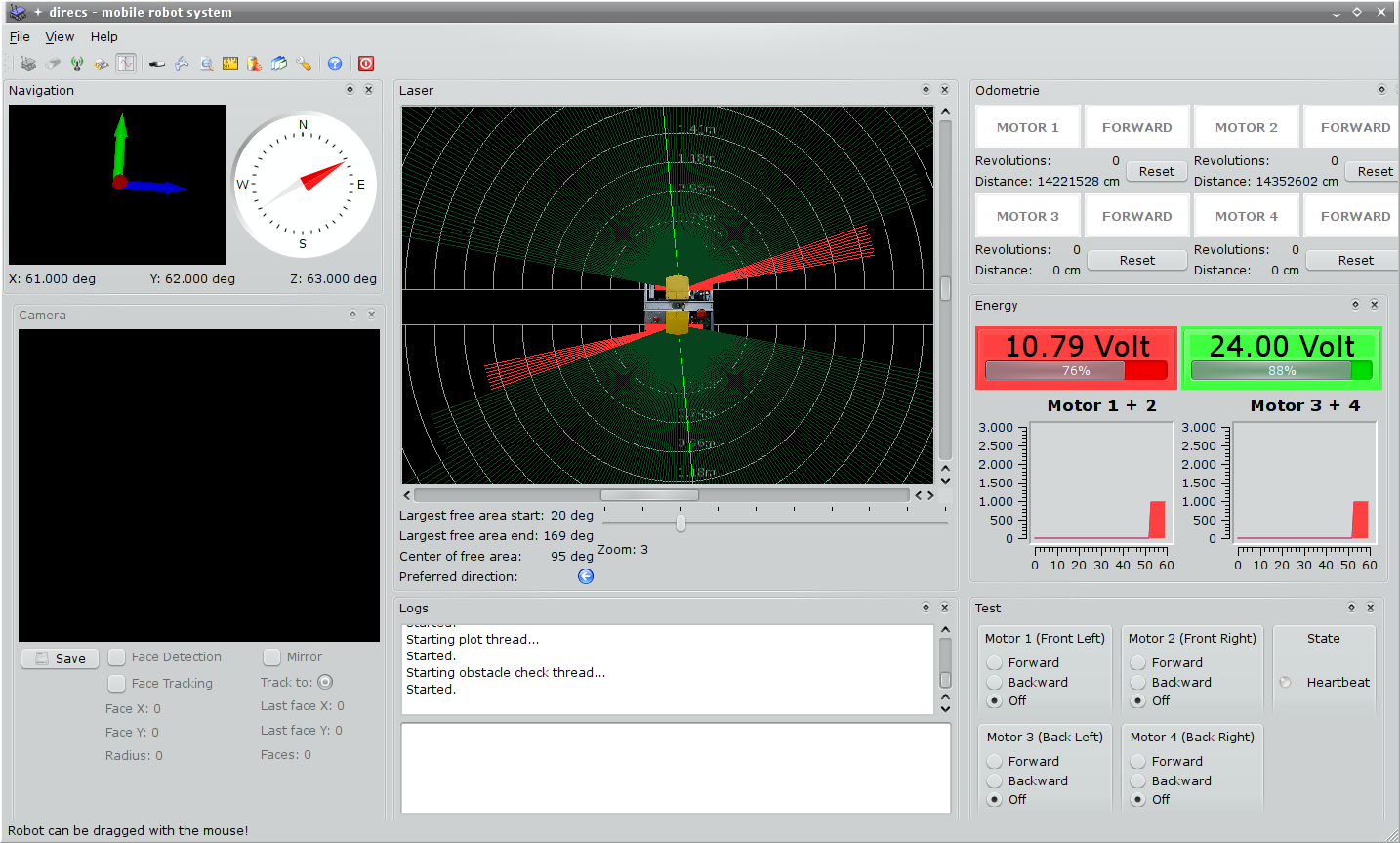
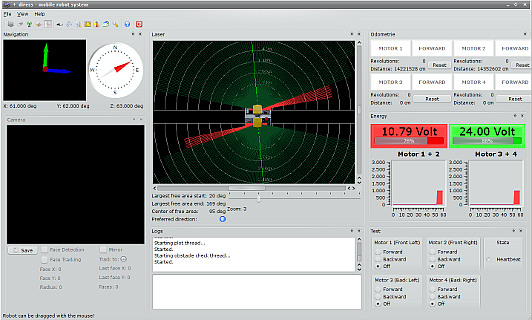
Im Hauptprogramm erfolgt das Auslesen der Akkus automatisch in der Klasse SensorThread. Die Anzeige in der GUI sieht so aus:
Vielleicht wird irgendwann noch einmal eine Strommessung hinzugefügt; dieses Modul soll gut dafür geeignet sein.