In der Zwischenzeit waren die German Open 2007 des Robocup zusammen mit der Hannover Messe . Nach angeregterm Austausch mit sehr freundlichen Mitarbeitern des Fraunhofer Institus rund um das Thema Robotik, Sensoren und Kameras, kam der Entschluss: Es muss eine ordentliche Kamera her! Nach langem Suchen be eBay und mit viel Glück wurde eine CCTV-Kamera und ein passendes Objektiv erworben. Für die neue Rundumsicht (Omnivision) wurde kurzerhand eine verspiegelte Glühlampe verwendet, da entsprechende Spiegel aus dem Profibereich im günstigsten Fall für 200 – 300 EUR zu haben sind…
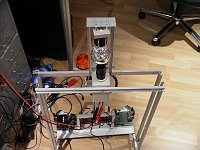
Nach einigen freihändigen Experimenten stellte sich eine Höhe von ca. 93 cm über dem Boden als günstig heraus, um einen guten Überblick über einen Raum zu bekommen. Hier ist nun die Montage des "Spiegels" (Glühlampe) zu sehen. Als erstes eine normale Glühlampenfassung plus Aluwinkel:

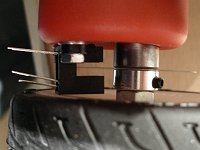
Damit man den Spiegel etwas besser ausrichten kann, sind es Langlöcher geworden:

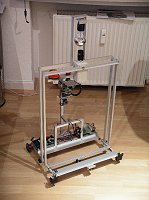
Hier nun das ganze auf den Roboter montiert – inklusive Kamera:



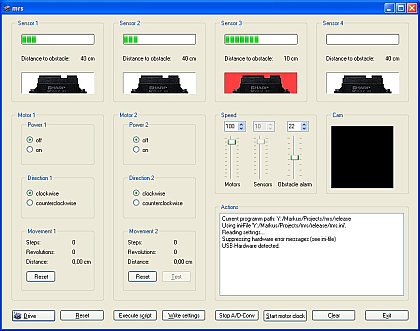
Und so sieht das erste Livebild der Kamera aus (testweiseals "Webcam" im Messenger "Kopete"):


Aufgrund eines Bugs in Video4Linux hier nur in schwarz-weiß. Die Kamera ist nämlich eine Farbkamera, die nur bei schlechten Lichtverhältnissen oder Dunkelheit in einen extrem empfindlichen schwarz-weiß-Modus schaltet!
Hier noch einmal der Roboter in der derzeitigen Gesamtansicht:


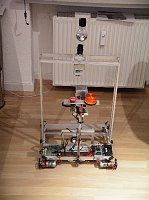
Bei der Größe,wird der Transport im Auto fast schon schwierig (hier auf dem Weg zum Robotik-Treff Niedersachsen ):