Kategorie: Video
Er fliegt!
Es ist soweit, der erste Outdoorflug! Na ja, um ehrlich zu sein, der zweite. Der erste endete nach zwei Sekunden mit einem „Überschlag“ – warum auch immer. Hier nun daher die ersten richtigen Aufnahmen eines ersten Fluges draußen.
Ich flog den Kopter hier nicht selbst, da noch etwas Übung fehlt und einer ja filmen musste. Vermischt mit dem hoffentlich bald letzten Schneefall hier nun das Video:
Wie bereits erwähnt, sind in dem Video meine Flugversuche nicht zu sehen. Das Ergebnis daraus sind einige Defekte. :-) Es zeigt sich, dass das Landegestell alles andere als robust ist und auch der so schön einklappbare Rahmen sehr schnell erste Brüche hat. Erste Fotos folgen noch – eine neue Bestellung eines neuen, stabileren Rahmens auch. :-)
Indoor-Test 3 (ohne self-levelling)
So, nachdem der erste (nicht gefilmte) Outdoor-Test kläglich schief ging, nun noch mal ein Indoor-Test. Den Kopter dieses Mal zwischen zwei Stühlen fixiert. In den vorigen Videos war das self-levelling bereits aktiviert, so dass hier vielleicht der Fehler lag, dass der Mikrokopter „Über Kopf“ ging (das passiert auch draußen im Schnee – autsch).
Nun ist also self-levelling abgeschaltet und ich teste noch einmal. Aber seht selbst:
Indoortest 2 – mit Bondage
Okay, vielleicht nicht gefesselt, aber so ganz habe ich mich noch nicht getraut ihn los fliegen zu lassen. Aber seht selbst:
Indoor-Test 1
Es ist soweit, heute erfolgte ein erste Test des neuen Quadkopters – natürlich noch drinnen.
Test des neuen Kopters mit Servotester
Hier nun ein Test der neu montierten Motoren, mit en neuen ESCs und einem Servotester. Sieht doch schon recht vielversprechend aus:
Ach so, hier kann man im Detail sehen, wie das Teil angeschlossen wird.
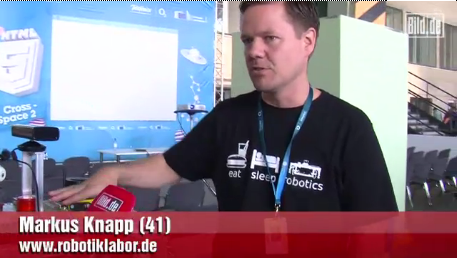
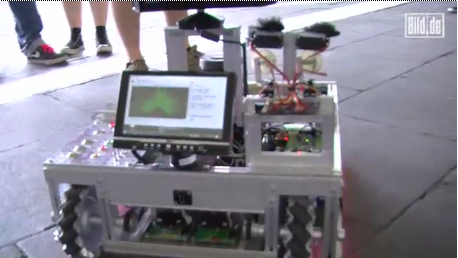
Campus Party 2012 – Videos
Präsentation meines Roboters direcs1 auf der Campus Party 2012. Gesprächspartnerin ist Neelie Kroes – Vizepräsidentin der Europäischen Kommision und Präsidentin der Digitalen Agenda für Europa:
Best of Robots Show – Part 1:
Best of Robots Show – Part 2:
Best of Robots Show – Awards Ceremony:
Campus Party 2012 – Medien
Hier die Links zu den derzeit verfügbaren Berichten über die Campus Party 2012 in Berlin mit meinem Roboter „direcs1“.
- ZDF Morgenmagazin, 22.08.2012 (mit Flash hier)

- 3sat, nano (mit Flash hier)


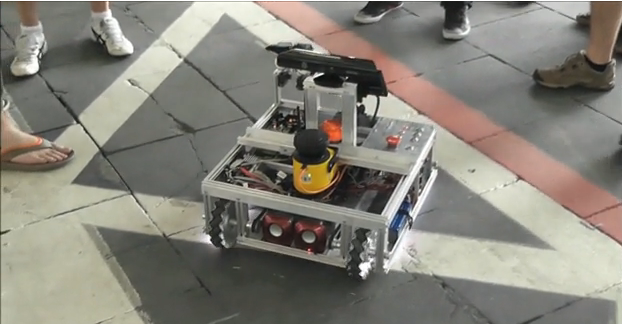

Er fährt!
Nachdem im vorigen Beitrag gezeigt wurde, was alles nicht geht, und wie auch in der letzten Sendung meines Podcasts erwähnt, kann ich heute sagen: Kaum 7,5 Jahre später… und er fährt! ;-)
Sicher noch nicht perfekt und im hier auch noch sehr langsam, aber die „Richtung“ ist erkennbar. Nun gilt es noch die Parameter etwas zu optimieren, damit er auch noch durch die Tür fährt. Derzeit ist dieser Abstand dem Roboter noch zu eng. Alle diese Werte, wie diese „Durchfahrweite“, die per Kosinussatz anhand der Laserlinien ermitteltwird, können übrigens in der GUI „live“ über einen Settingsdialog geändert werden.
Hindernisumfahrung – Erstes Ergebnis
Wie im vorigen Beitrag gezeigt, fuhr der Roboter beim Starten nicht in die Richtung, die vom obstacleCheckThread schon lange ermittelt wurde. Der Fehler wurde gefunden und nun sieht das Ganze schon etwas besser aus. Noch nicht perfekt, aber es geht in die richtige Richtung – im wahrsten Sinne des Wortes:
PS.: Natürlich ist dieses nicht die Endgeschwindigkeit, aber zum Testen erstmal ganz angenehm.