Motor Test
Zweite Testfahrt mit Schrittmotoren
Erste Testfahrt mit Schrittmotoren
Umbau Pan-Tilt-Halterung
Ja, leider war nicht nur der Haltestrom durch die großen Schrittmotoren sehr stark, auch der Verlust allein durch Wärme (die Kühlkörper der Motoransteuerung wurden schlappe 38° warm) so enorm, dass der Entschluss gefasst wurde, auf bewährte Getriebemotoren umzusteigen. Der Antrieb sollte hierbei über Zahnräder und Zahnriemen gelöst werden. Nachteil: Genaue Position de r Motoren unbekannt. Vorteil: Die Halterung der Kamera konnte weiter verbessert werden:


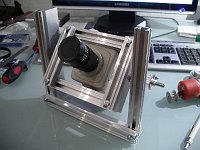
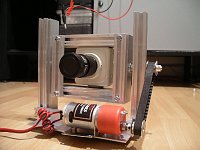
Wie sich herausstellte, war die hier gewählte Motorposition nicht ganz günstig, sollte der Roboter doch möglichst nah vor seine Räder schauen können. Da der Platz für den Motor aufgrund größtmöglicher Bewegungsfreiheit der Kamera nur wenige Positionen zulässt, wurde die Wahl auf ein neues Antriebssystem gelegt: Stahlzahnräder, die – wie so oft – noch individuell angepasst wurden. Wie immer alles gut dokumentiert:




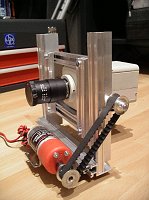
Gelagert wurde die Halterung auf einer 5 mm-Edelstahlachse mit ("Rundmetall") Kunststofflagerbuchsen und Stellringen:

Ein kurzes Video hierzu soll natürlich nicht fehlen. :-)
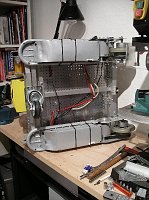
Nun musste noch die Pan (Schwenk) Halterung gelöst werden. Hier wurde eine 10 mm-Achse verwendet, damit das ganze noch stabiler ist:





Und wie immer, zurück auf den Bot, das ganze:






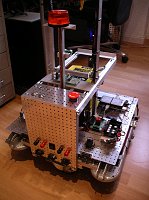
Abbau des „Rundumspiegels“, Aufbau der Pan-Tilt-Halterung für die Kamera
Da durch die beiden Laserscanner nun eine gewisse Rundumsicht erreicht wurde, wurde die verspiegelte Glühlampe mitsamt der Kamera oben abgebaut, um sie später mit einer Art Pan-Tilt-Halterung zu versehen. Somit sollte die Kamera also mit Motoren hoch, runter und nach links und rechts (schwenkend) bewegt werden können. Das war das Ziel. Hier die Fotos mit dem unerwartet langen Weg da hin:

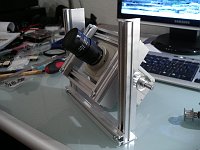
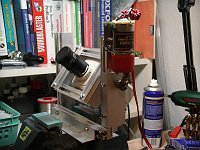
Nun wurden ein paar der beliebten Profile gesägt und auf/an Schrittmotoren montiert. Diese haben den Vorteil der exakten Positionierung (der später daran befestigten Kamera). Sehr schön zu sehen, die angeschliffenen Motorachsen, um sie innerhalb des Profils fest "einklemmen" zu können:




Hier dann im Aluprofil fixiert:


So sehen die guten Stücke übrigens von innen aus. Beim Befestigen brach nämlich leider eine der 3mm-Schrauben ab, weshalb der Motor auseinander genommen werden musste umd das Gewinde frei zu bohren:

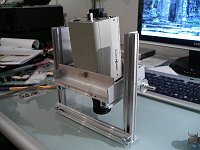
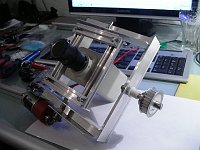
Und weiter ging es mit der Montage der Kamera:


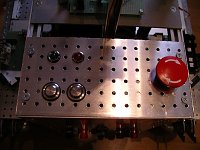
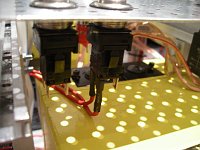
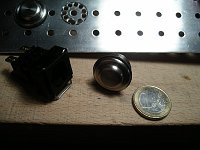
Damit die späteren Kabel sich nicht endlos um die Kamera wickeln, waren definierte Endpunkte erforderlich. Diese wurde mittels robuster Microschalter festgelegt. Sowohl mechanisch, also auch per späterer elektronischer Auswertung der Schaltersignale:

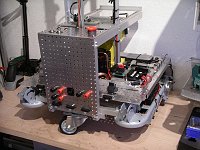
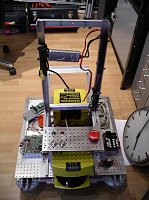
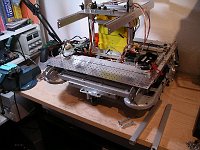
Nun das ganze auf dem Roboter montiert:






Hier sehr schön im Detail zu sehen, die Mikroschalter:


IIm Gesamtergebnis dann so:




Abschließende Arbeiten an der Stromversorgung







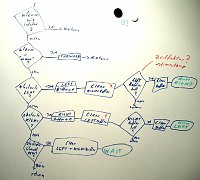
Ein erster Wurf für die neue Logik (Laserscanner vorne und hinten):
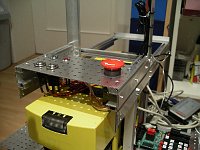
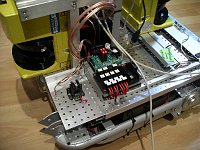
Vollständige Überarbeitung der kompletten Stromversorgungen einschließlich Schmelz-Sicherungen
Nun wurder der zweite Laserscanner mit einer Stromversorgung versehen, die des alten erneuert, sowie die beiden seriellen Verbindungen mit komplett neuen Kabeln und Steckern versehen:




Nun wurden die Hauptschalter mit allen Spannungen (2x12V, 1x24V) beschaltet und auch der Not-Aus-Schalter neu verkabelt, sowie die Sicherungshalter eingeschliffen:



Zur leichteren Identifikation der Stromverbindungsstecker wurden diese per Aufkleber beschriftet:


Leider gab der älteste 12V-Akku den Geist auf und musste ausgetauscht werden. Hierbei wurden dann alle neuen Stromkabel unter diesem "versteckt:

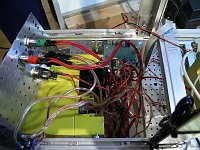
Und so sieht das ganze dann bis hierhin aus:



Zweiter Laserscanner montiert
Durch ein glückliches Schnäppchen konnte ein zweiter Laserscanner erworben werden. :-) Leider fiel diesem die gerade erst erstellte "Hinterkonstruktion" zum Opfer. Aber der unschlagbare Vorteil, hiermit dem Robot eine "nahezu" Rundumsicht zu ermöglichen, machte das ganze wett! Und so sah der Umbau dann im Detail aus.

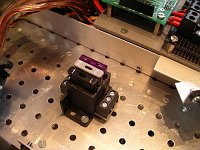
Um nicht jede Menge Bohrspäne auf dem Bot und in den Schaltungen zu verteilen, wurden ein paar "Papierabweiser" angeklebt:


Wenn sowieso schon an allem gebaut wurde, so konnte die schon lange fehlende Verstärkung der "Möbelrolle" hinzugefügt werden:


Mit dem zweiten Laser wurden die meisten Infrarotsensoren und deren Verkabelung auch erst einmal hinfällig:



Der vorher auf dem Bot plazierte Ultraschallsensor wurde unter ihn montiert. Somit können auch Hindernisse unterhalb des Laserscanners detektiert werden:


„Fernsteuerung“ per Joystick integriert und Stromversorgungsbuchsen hinzugefügt
Zum leichteren Testen wurde dem Programm eine Steuerung eines USB-Joysticks/Gamepads hinzugefügt.
So sieht der Joystick aus:

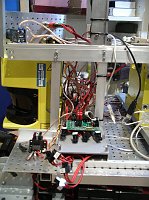
Endlich wurde die zentrale Stgromversorgung/verteilung korrigiert. Ein zentrales "Schaltpult", und schon einmal ein Sicherungshalter in Vorbereitung:

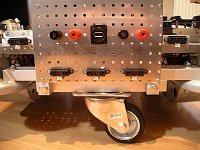

und so sieht das ganze dann vollständig aus: