Die Ansteuerung des Laserscanners wurde komplett von über 220 einzelnen CARMEN Modul Dateien in den eigenen Source-Code integriert und auf 3 Dateien reduziert. Aktuelle Screenshots in der entsprechenden Rubrik im Hauptmenü.
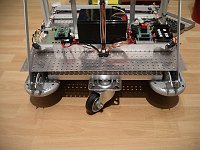
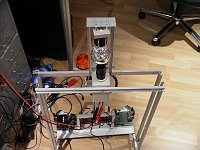
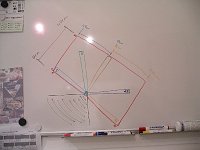
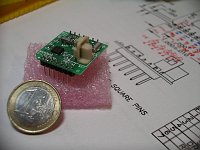
Damit der Bot nun in genau die vorgegebene freie Richtung (grüner Bereich) fahren kann, wurde ein Erdmagentfeldsensor auf einer Zusatzplatine montiert:

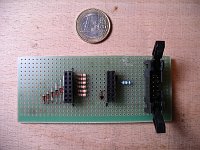


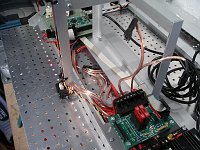
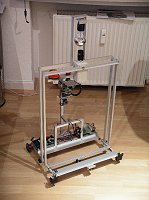
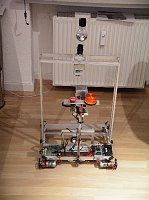
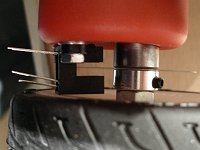
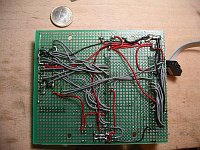
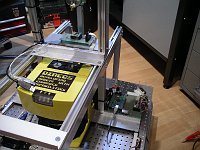
Wie man sieht, ist es eine extra Platine geworden, da der Sensor möglichst weit von anderen magnetischen Störquellen entfernt sein sollte (wie z.B. den Motoren). Nachden dann auch die Hauptplatine verdrahtet wurde (nicht schön, aber selten), wurde die Platine oberhalb des Laserscanners montiert. Das sieht man hier:
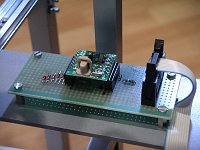
Der Magnetfeldsensor hat genau 3 Sensoren, die die Asrichtung der X, Y und Z-Achse ausgeben. Angesteuert wird er über eine SPI-Schnittstelle vom bereits vorhandenen Atmel Microcontroller. Die Ansteuerung ist noch zu programmieren…