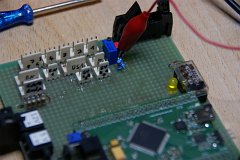
Was so passiert, wenn man einen Stecker falsch beschriftet und leichtfertig sich auf die (falsche) Beschriftung verlässt sieht man in den nachfolgenden Bildern. Leider wurden hier für einige (Schreck)Sekunden 12V auf das Atmel-Board gegeben, auf welches nur 5V verträgt. Das Ergebnis sieht dann (nach einen kleinen, aber feinen Rauchwolke so aus:

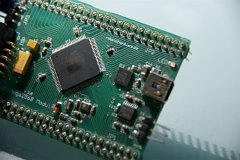

Für diejenigen, die den Atmel von so nah noch nie gesehen haben: Der Hügel sollte dort auf dem Bild nicht zu sehen sein…
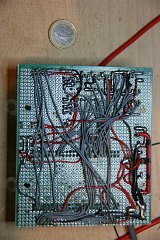
Ein paar Tests (und Drahtbrücken) später…

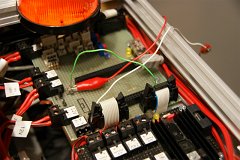
…stellte sich erfreulicherweise heraus, dass die beiden nachgelagerten Motorcontrol-Boards keinen Schaden erlitten haben… Glück gehabt.